陆地移动机器人系统的理论与实践

制定新的业务理论,特别是针对城市敌对行动和不对称冲突,将需要新的系统和技术工具,以减少军事和平民的损失。 这可以通过SMRC的发展,使用先进技术监测和收集信息,以及智能和目标检测,保护和精确打击来实现。 SMRC就像他们的飞行同行一样,由于超现代机器人技术的广泛使用,没有人工操作员。
这些系统对于在污染环境中工作或其他“暗淡,肮脏和危险”的任务也是必不可少的。 开发先进SMRK的需求与使用无人系统在战场上直接支持的需要有关。 据一些军事专家称,无人驾驶车辆的自治水平将不断提高,将成为现代地面部队结构中最重要的战术要素之一。

基于TERRAMAX M-ATV装甲车的机器人综合体,用于驾驶无人驾驶车辆
SMRK的运营需求和发展
在2003结束时,美国中央司令部发出紧急,急躁的要求,以应对简易爆炸装置(IEDs)的威胁。 JGRE(联合地面机器人企业)地面机器人系统组织制定了一项计划,通过使用小型机器人机器可以快速提高能力。 随着时间的推移,这些技术不断发展,已经部署了越来越多的系统,并且用户已经收到了用于评估的高级原型。 结果,已经学习操作先进机器人系统的参与内部安全领域的军事人员和单位的数量有所增加。
DARPA高级防御研究理事会目前正在根据其在人工智能领域的发展以及对所得图像的识别,对机器人机器学习技术进行研究。 所有这些技术作为UPI计划(无人感知集成 - 嵌入自动感知)的一部分而开发,可以通过具有良好移动性的车辆更好地理解环境/地形。 这项研究的结果是一台名为CRUSHER的机器,其运行评估始于2009年; 从那以后,又制造了几个原型。
MPRS(便携式机器人系统)计划目前专注于为小型机器人开发自主导航和防撞系统。 机器人. 它还定义、研究和优化旨在提高机器人系统的自主性和功能水平的技术。 RACS(敏捷作战支持机器人)计划开发各种机器人技术以满足当前的威胁和作战要求,以及未来的需求和能力。 RACS 计划还基于通用架构的概念以及多种车辆的机动性、速度、控制和交互等基本特征,为各种作战任务和各种平台开发和集成自动化技术。
机器人参与现代作战行动,使武装部队在行动中获得宝贵的经验。 关于在一个作战战场中使用无人驾驶飞行器(无人机)和SMRK的几个有趣的方向出现了,军事规划机构打算仔细研究它们,包括几个平台的一般管理,可以安装在无人机和无人机上的可互换机载系统的开发SMRK旨在扩大全球能力,以及有前途的战斗无人居住系统的新技术。
根据ARCD(主动航程清除发展)实验计划,主动路线路线的开发将开发所谓的“通过自动方式的区域安全保证”方案,其中若干SMRC将与若干无人机一起工作。 此外,还将评估技术解决方案,包括在无人平台上使用雷达站,评估控制和监测系统的整合以及系统的整体效率。 作为ARCD计划的一部分,美国空军计划开发提高SMRC和UAV(飞机和直升机计划)联合行动效率所需的技术,以及在所有平台上无缝操作传感器的算法,导航数据和数据的交换某些障碍。
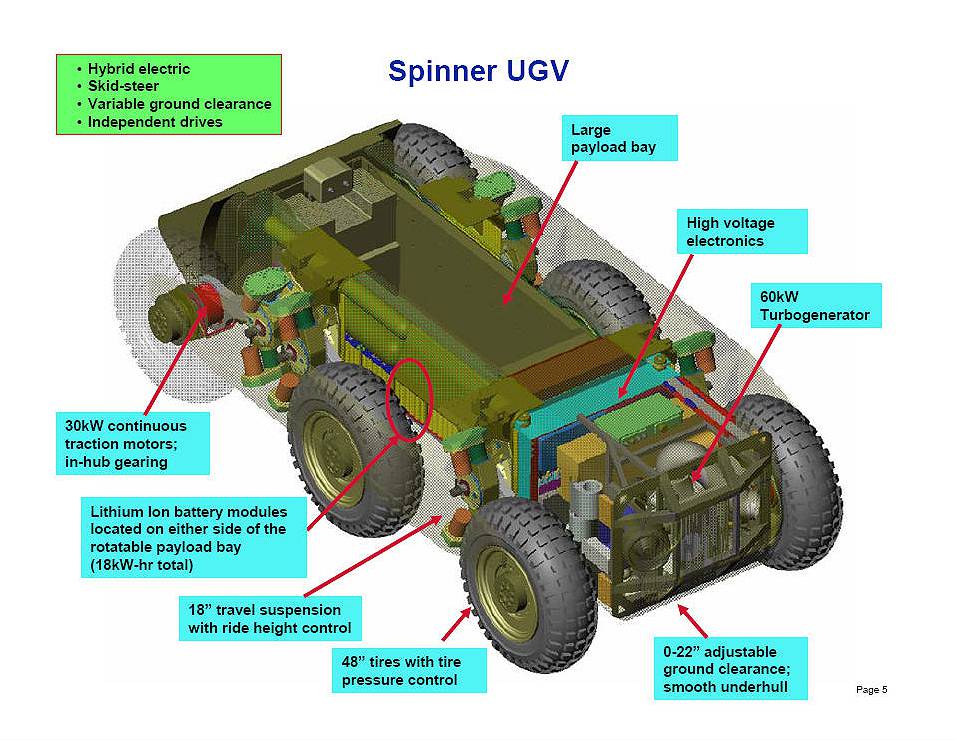
机械,电气和电子元件SMRK SPINNER的内部布局
陆军研究实验室ARL(陆军研究实验室)将实验作为其研究计划的一部分,以评估该技术的复杂性。 例如,ARL进行的实验评估了完全自主的SMRK检测和避免移动汽车和移动人员的能力。 此外,美国太空与海军武器系统中心 舰队 对新的机器人技术和相关的关键技术解决方案进行研究,包括自主制图,避障,先进的通信系统以及联合执行SMRK和UAV。
在几个地面和空中平台同时参与的所有这些实验都是在现实的外部条件下进行的,其特点是复杂的地形和一系列现实任务,在此期间评估所有部件和系统的能力。 作为先进SISM发展的这些试点计划(以及相应的技术战略)的一部分,确定了以下领域,以最大限度地提高未来投资的回报:
- 技术开发将为子系统和组件提供技术基础,并相应地集成到SMRC原型中进行性能测试;
- 该领域的领先公司将开发扩展机器人化范围所需的先进技术,例如,通过增加SMRK的范围和增加通信渠道的范围; 和
- 降低风险计划将为特定系统提供先进技术的改进,并将克服一些技术问题。
由于这些技术的发展,SMRK有可能在军事领域提供革命性的飞跃,它们的使用将减少伤亡并提高战斗力。 但是,为了实现这一点,他们必须能够独立工作,包括执行复杂的任务。


武装SMRK的一个例子。 AVANTGUARD以色列公司G-NIUS无人地面系统

高级模块化机器人系统MAARS(模块化高级武装机器人系统),配备机枪和榴弹发射器
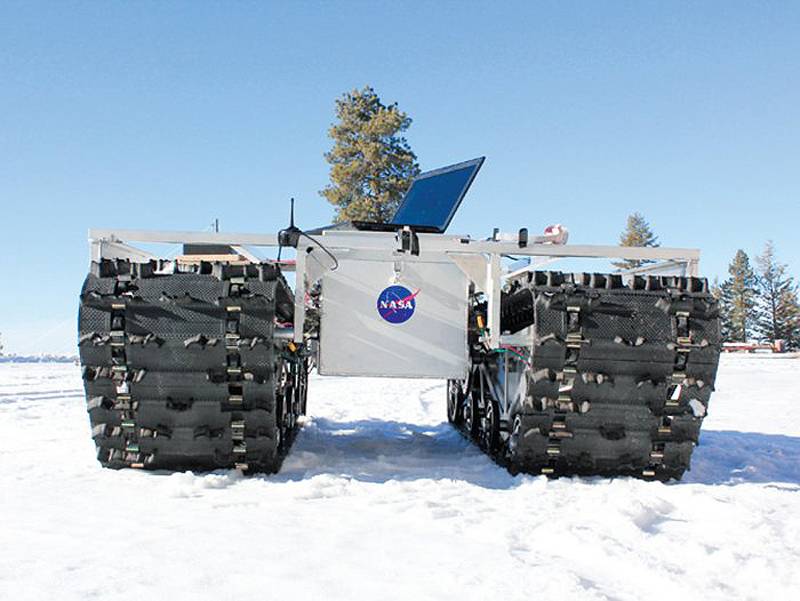
由NASA SMRK GROVER在雪地上设计
高级SMRK的技术要求
先进的SMRC是为军事任务而设计和开发的,主要在危险条件下运行。 今天,许多国家提供机器人无人系统领域的研究和开发,能够在大多数情况下在崎岖地形上工作。 现代SMRC可以向操作员发送视频信号,从战术角度看有关障碍物,目标和其他变量的信息,或者在最先进的系统中,做出完全独立的决策。 事实上,当导航数据与车载传感器和来自远程操作员的命令一起使用以确定路线时,这些系统可以是半自动的。 完全自动驾驶的车辆自行确定其自身的路线,仅使用车载传感器来计算路线,但操作员始终有机会做出必要的具体决定,并在危急情况或车辆损坏时进行控制。
如今,现代化的SMRC可以快速检测,识别,定位和中和多种类型的威胁,包括在各种地形的辐射,化学或生物污染条件下敌人的活动。 在开发现代SMRK时,主要问题是创建功能有效的设计。 关键点包括机械设计,一组车载传感器和导航系统,人机交互,移动性,通信和功率/功耗。
机器人与人类之间的交互要求包括高度复杂的人机界面,因此必须开发多模式技术解决方案以实现安全友好的界面。 机器人与人之间相互作用的现代技术非常复杂,需要在实际操作条件下进行大量测试和评估,以便在人与机器人之间的相互作用以及机器人与机器人之间的相互作用中实现良好的可靠性。

随着SMRC开发爱沙尼亚公司MILREM
设计师的目标是SMRC的成功开发,能够在地形复合体上日夜执行任务。 为了在每种特定情况下实现最大效率,SMRC应能够在高速,高机动性和快速改变方向的情况下在所有类型的地形上移动,而不会显着降低速度。 与移动性相关的设计参数还包括运动学特征(主要是在所有条件下保持与地面接触的能力)。 SMRC除了具有不具有人类固有局限性的优点外,还具有整合可替代人类运动的复杂机制的缺点。 乘坐质量的设计要求应与感知技术以及传感器和软件的开发相结合,以获得良好的移动性和绕过各种类型障碍的能力。
确定高机动性的一个极其重要的要求是能够使用有关自然环境(爬坡,植被,石头或水),人造物体(桥梁,道路或建筑物),敌人的天气和障碍物(雷场或障碍物)的信息。 在这种情况下,可以确定他们的敌人的位置和位置,并且由于使用速度和方向的显着变化,SMRK在敌人炮击下的生存机会显着增加。 这些技术特征使得开发武装侦察系统成为可能,这些系统可以执行侦察,监视和目标探测任务,在武器综合体存在的情况下执行火力任务,并且还能够探测自身防御威胁(地雷,敌方武器系统等)。
所有这些战斗能力都应该实时实现,以避免威胁,并使用他们自己的敌人来抵消敌人 武器或与远程武器系统通信的渠道。 高机动性以及在困难的作战条件下定位和跟踪敌方目标和活动的能力极为重要。 要做到这一点,有必要开发能够使用内置的集成动作识别算法实时跟踪敌人活动的智能SMRK。
高级功能(包括传感器,用于组合数据的算法,主动可视化和数据处理)非常重要,这需要现代的硬件和软件架构。 当在现代SMRK中执行任务时,使用GPS系统,惯性测量单元和惯性导航系统来估计位置。
使用通过这些系统获得的导航数据,SMRK可以根据车载程序或遥控系统的命令独立移动。 同时,SMRK能够以较短的间隔向远程控制站发送导航数据,以便操作员知道其确切位置。 完全自主的SMRK可以规划他们的行动,为此,绝对有必要开发一种消除碰撞的路线,同时最小化诸如时间,能量和距离等基本参数。 导航计算机和具有信息的计算机可用于创建最佳路线并对其进行校正(激光测距仪和超声波传感器可用于有效地检测障碍物)。
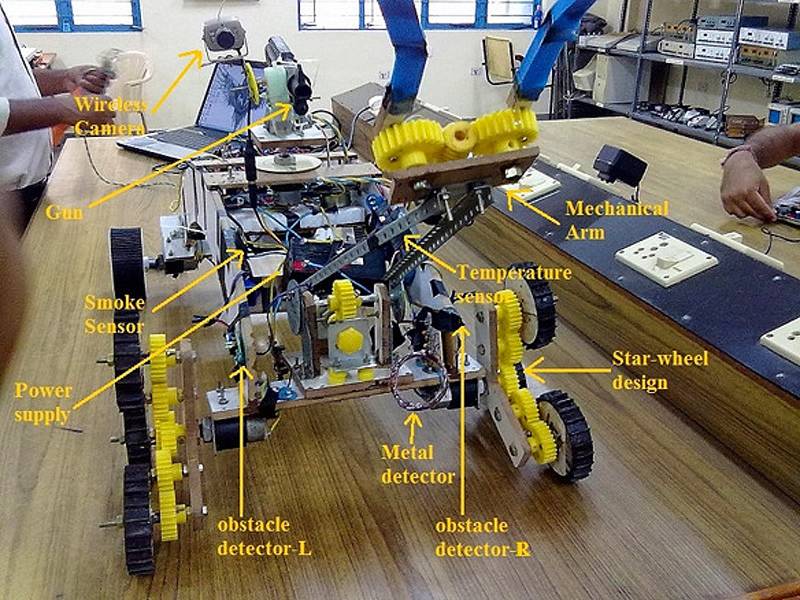
由印度学生开发的原型武装SMRC的组成部分
导航和通信系统的设计
开发有效SMRK的另一个重要问题是导航/通信系统的设计。 安装数码相机和传感器以获得视觉反馈,同时安装红外系统以便在夜间操作; 操作员可以在他的计算机上看到视频并向SMRC发送一些基本的导航命令(向右/向左,向前,向前)以调整导航信号。
在完全自主的SMRK的情况下,可视化系统与基于数字地图和GPS数据的导航系统集成。 为了创建完全自主的SMRK,对于诸如导航,外部感知系统的集成,路线规划和通信信道等基本功能将是必需的。
虽然用于单个SMRK的导航系统的集成处于后期阶段,但是用于规划SMRC和无人机的几个SMRC和联合任务的同时操作的算法的开发处于初始阶段,因为很难同时建立多个机器人系统的通信交互。 正在进行的实验将有助于确定需要哪些频率和频率范围以及特定任务的要求将如何变化。 一旦确定了这些特性,就有可能为多台机器人机器开发先进的功能和软件。

无人驾驶的K-MAX直升机在自主测试期间运送SMSS(Squad Mission Support System)机器人车辆; 飞行员在K-MAX驾驶舱内,但没有控制它
通信工具对于SMRK的功能非常重要,但是无线解决方案具有相当大的缺点,因为由于敌方电子抑制系统的地形,障碍或活动引起的干扰,所建立的连接可能会丢失。 机器对机器通信系统的最新发展非常有趣,并且由于这项研究,可以创建用于机器人平台之间通信的经济且有效的设备。 DRSC(专用短程通信)专用通信标准将应用于SMRC与SMRC和UAV之间通信的现实条件。 目前正在大力关注确保以网络为中心的运营中的通信安全性,因此,可居住和无人居住系统领域的未来项目应基于满足通用接口标准的先进解决方案。
今天,大多数人都满足了低功耗短期任务的要求,但是执行长期高功耗任务的平台存在问题,特别是流媒体视频是最紧迫的问题之一。
燃料
能源选择取决于系统的类型:对于小型SMRK,能源可以是先进的可充电电池,但对于较大的SMRC,可以通过传统燃料产生必要的能量,这允许实现具有新一代电动机的电路。 影响电源的最明显因素是外部条件,机器的质量和尺寸,以及完成任务的时间。 在某些情况下,电源系统必须包括作为主要来源的燃料系统和可充电电池(可见度降低)。 适当类型的能量的选择取决于影响任务执行的所有因素,并且能量源必须提供所需的移动性,通信系统,传感器组和武器系统(如果可用)的不间断操作。
此外,有必要解决与复杂浮雕的移动性相关的技术问题,障碍的感知和错误行为的自我纠正。 在现代项目的框架内,已经开发了新的先进自动化技术,用于集成车载传感器和数据处理,路线选择和导航,检测,分类和避免障碍,以及消除与通信丢失和平台不稳定相关的错误。 对于自主的越野导航,机器必须区分地形,这包括地形的3D地形(地形的描述)和障碍物的识别,例如石头,树木,不流动的水体等。 一般能力不断增加,今天我们已经可以谈论相当高水平的地形图像定义,但仅限于白天和天气好,但机器人平台在未知空间和恶劣天气条件下的能力仍然不足。 在这方面,DARPA执行了几个实验计划,在任何天气,白天和夜晚检查未知地形中的机器人平台的能力。 DARPA计划称为人工智能应用研究(人工智能领域的应用研究),针对自主系统的智能决策工具和其他先进技术解决方案进行研究,以期在高级机器人系统中具体应用,以及自主多机器人学习算法执行联合任务,这将允许机器人组自动处理新任务并在它们之间重新分配角色。
如上所述,操作条件和任务类型决定了现代SMRC的设计,现代SMRC是一个移动平台,具有电源,传感器,计算机和软件架构,用于感知,导航,通信,训练/适应,机器人与人类之间的交互。 在未来,它们将更加多边化,将具有更高水平的统一和互动,并且从经济角度来看也将更加有效。 特别感兴趣的是具有模块化有效载荷的系统,它允许您使机器适应不同的任务。 在未来十年,机器人车辆将可用于执行战术操作并基于开放式架构保护基地和其他基础设施。 它们的特点是具有显着的一致性和自主性,高移动性和模块化车载系统。
SMRC用于军事用途的技术正在迅速发展,这将使许多武装部队能够将士兵从危险任务中移除,包括探测和销毁简易爆炸装置,侦察,保护部队,排雷等等。 例如,由于先进的计算机建模,战斗训练和实战作战经验,美国军队的战斗群的概念表明,机器人车辆增加了地勤车辆的生存能力,并有助于显着提高战斗力。 开发有前景的技术,如移动性,自治,武装,人机界面,机器人系统的人工智能,与其他SMRK和可居住系统的集成,将有助于提高无人居住的地面系统的能力及其自治水平。


俄罗斯冲击机器人复杂平台 - 由NITI Progress开发
使用的材料:
www.defense-update.com
www.qinetiq.com
www.milrem.ee
www.darpa.mil
www.airforce.com
www.niti-progress.ru
www.wikipedia.org
ru.wikipedia.org
信息