明天的世界:处于十字路口的军事机器人
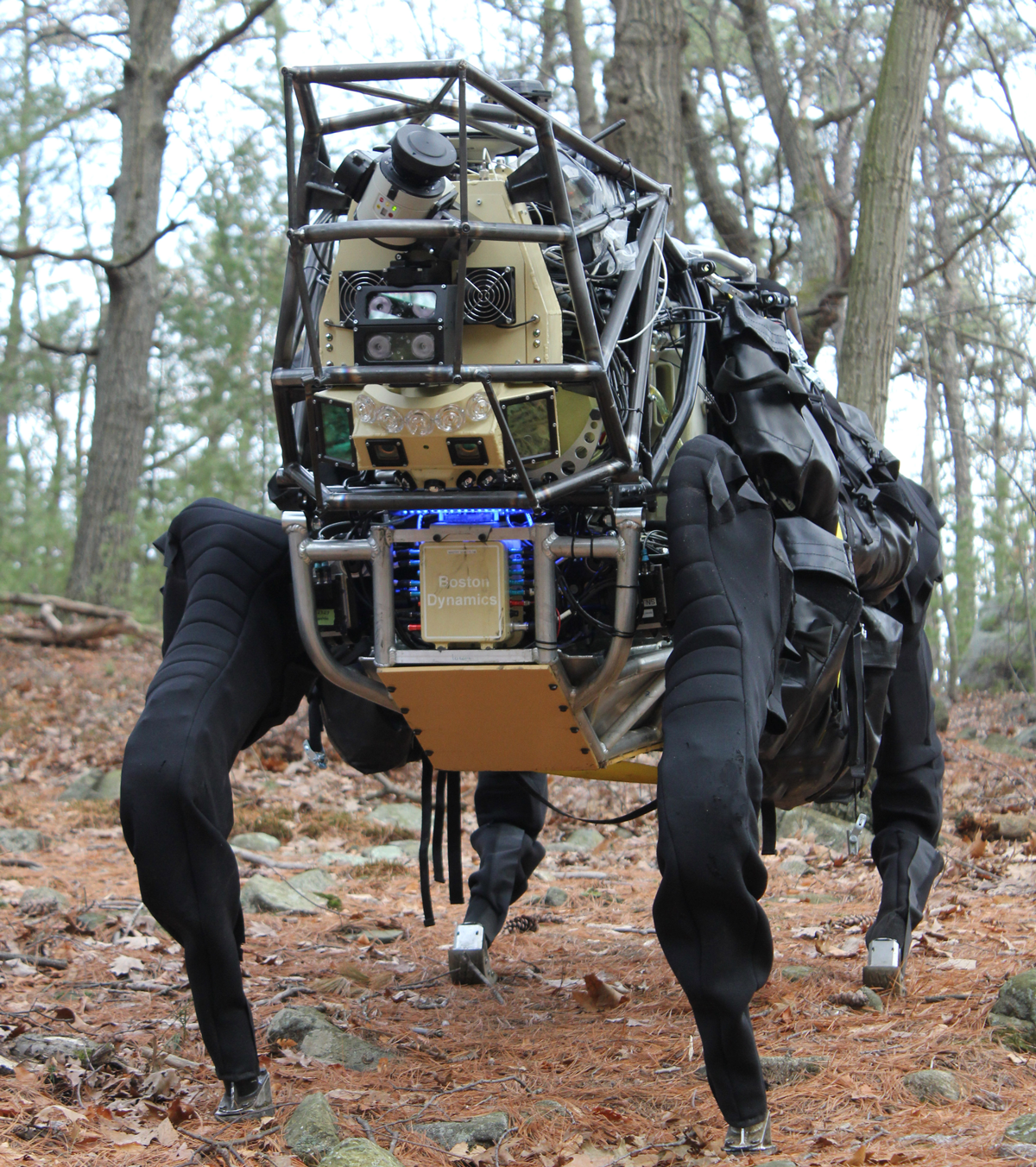
LS3机器人是解决移动性问题和系统配置部署单元的能力的新方法。
如今,自动地面车辆 (ANA) 在整个作战任务范围内的实用性已不再受到质疑。 最近的作战行动已成为许多系统的试验场,并暴露了军队的优势和劣势。 机器人. 考虑一些现有的计划和它们将提供的机会。
经过几年的密集操作,自动地面车辆受到用户和军事指挥官的青睐,但目前这些能力的发展方向正处于转折点,因为现在部署的系统已从运营场地中移除,未来的要求也已确定。
武装部队面临着艰难的选择:他们需要确定哪些现有系统需要留下,什么不再需要,短期内需要增长,以及他们计划如何开发下一代机器人系统,以保证其能力发生质的变化。
今天的美国军队拥有各种类型的全日空武器数量最多,因此很明显世界和工业界的许多军队都在密切关注他们的计划。
但是,美国所有武装部队应该解决的第一个问题是如何处理目前部署的平台,其中许多是在紧急资助计划下购买的,例如紧急联合处方,而不是按照官方计划。
“我们有很多机器人,我们已经购买了几年,我们称之为”偶尔的工作“,中型机器人系统联合项目发展局大型无人驾驶车辆项目经理Aaron Roberson中校解释说。联合项目办公室)。 “我们不知道如何对待他们,我们敦促军队做出决定,因为没有办法支持他们。”
操作系统要求导致购买和部署完全不同类型的设备。 如果这种方法满足了当时的需要,那么目前它以非标准系统的形式出现了一个重大问题。 Roberson进一步指出,军方将决定如何处理他们,应该认真对待这个决定:“如果我们决定摆脱它们,那么我们需要明白,在我们开始这个过程之后,这些系统将无法恢复,因为我们我们不仅要摆脱系统本身,还要摆脱它们的所有部分以及我们必须维护它们多年的所有部分。“
在美国军方使用的众多全日空中,ORotiQ North America生产的Talon系列和iRobot生产的PackBot,落地式车辆,RONS和M160远程弹药系统进行了各种修改。 这种多样性是美国军方面临的最大问题之一 - 管理和支持基础设施的小冗余。 在若干计划中,避免专有系统和引入开放式架构的需求是一条红线。 对于美国陆军的IOP计划(互操作性配置文件 - 交互参数)和美国海军先进优先级AEODRS爆炸物处理系统计划尤其如此。


用于远程中和弹药的机器人
AEODRS计划的目标是通过开发一系列由三个选项组成的设备来获得下一代功能:增量1,一种用于重量小于15,9 kg的分散操作的可穿戴系统,在100米的距离上进行勘探和威胁评估,并具有有限的检查和处置能力; 增加2的重量可达66千克,用于战术行动,由两人携带,能够在1 km的距离内进行侦察和探测威胁; 和增量3 - 一种重达300 kg的拖车系统,能够吊起重物。 如果Increment 2和3选项旨在替换现有系统,则Increment 1选项旨在填补技术空白。
根据海军水面发展中心机器人部门负责人Michael Del Signoret的说法,AEODRS计划旨在消除在操作平台上发现的一些限制。 “这些系统建立在不同的封闭式架构上,因此,独立的操作员控制单元,独立的供应渠道以及非常复杂和繁琐的现代化过程。”
其目标还在于解决有限自治,遥控,有限的电机能力和机械手自由度等问题; 缺乏态势感知; 车载摄像头的感知深度低; 和通信范围和带宽问题。
后者特别值得关注:“通信系统具有或多或少的适当范围......但是信道宽度有限,因此我们想要集成的一些高级功能,例如自治或提供批量数据的能力,您无法获得当前带宽”。
Del Signoret解释说,AEODRS将通过为整个系统系列实现通用架构来寻求解决这些问题。 每个选项都分为模块,它们之间的接口由一个通用的状态控制架构决定,该架构将安装并提供物理,电气和逻辑(取自无人系统的统一架构标准,无人系统联合架构[JAUS] / SAE AS-4标准)接口,模块特性要求以及实施信息。
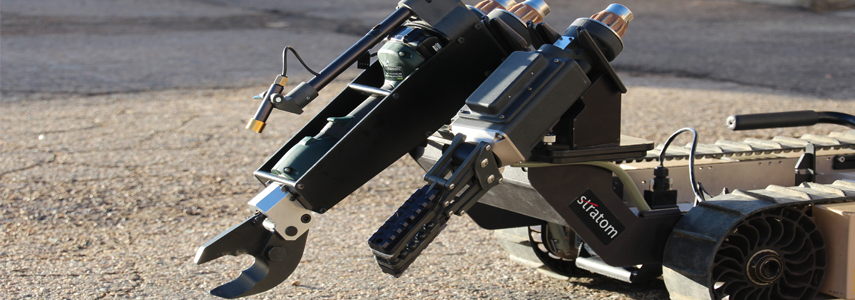

Stratom的ToolChanger可以接受五种不同的工具并自动替换它们。
然而,AEODRS本身并不是一件事,它是为与其他系统的交互而创建的。 “AEODRS和IOP程序彼此密切相关,这里定义AEODRS实际上是IOP计划的规范是最合适的。 95%上的AEODRS架构与IOP兼容,我们正在努力协调与100%不兼容的区域。“
增量1和2选项将包含更多高级功能,包括解决需要双手任务的任务所需的操作能力,中间点导航,独立操作,在运动中创建2D和3D贴图的能力,从板载容器中独立更换工具并延长至12小时。
“因此,我们将能够更快地为用户提供技术。 因为我们相信这会让更多“玩家”留在游戏中。 小型机器人公司现在可以访问开放式架构。 我们想给业界一个调试模型,然后他们可以开发基于这个模型的模块,来向我们演示这个技术。 如果这是需要的,它将很容易地集成到我们的系统中。“
许多可能满足AEODRS定义的某些要求的系统已经在开发中,尽管它们可能没有特别包含在AEODRS中。 Adroit HDT Robotics手臂采用16自由度组装,其中10具有驱动器,6(远销铰链)通过差速器驱动。 Adroit手重量小于9 kg,可以提升22 kg,每个铰链的旋转速度可以超过每秒120°。
由Northrop Grumman开发的DADM(Dual Armed Dexterous Manipulator) - 也被称为Lobster--正在与位于加利福尼亚的Applied Minds合作开发。 DADM允许广泛使用商业现成组件,整个系统由两个主要元素组成:DADM平台和操作员控制器。
操纵器的特征在于两个夹具连接到一个共同的壳体,每个夹具具有8自由度,具有非常灵活的能力。 该配置几乎对应于人的尺寸和移动,而操纵器设计用于执行高度精确的任务,例如拉开袋子或切割小线。 控制单元具有类似配置的一组操作员手柄,其运动和输入数据复制操纵器。 应当注意,为了保持高水平的操作能力并执行DADM本身的高精度操作,3-D视频流被输出到操作员的头戴式显示器。 它配备了高分辨率立体相机,并提供执行精确操作任务所需的深度感知。
诺斯罗普格鲁曼公司的机器人系统也生产了两个工具容器。 英国陆军的Cutlass系统有一个容器,可以容纳三套不同的机器人手臂。 该系统能够在没有来自操作员的任何信号的情况下自动改变这些组,这消除了将设备返回给用户以更换工作体的需要。
IRobot与Stratom合作开发了一个类似的系统。 ToolChanger套件允许您在PackBot上放置各种工作体,并在无需操作员干预的情况下自动更改它们。 在安装在后部的悬架中,该装置最多可容纳五个仪器; 典型的套件包括剪线钳,耙子,爆破装置和操纵器。 工具连接头集成在机器人的手臂中。
与AEODRS计划一样,IOP计划主要侧重于统一性。 Joint Ground Robotics Enterprise的一位专家解释说,IOP进一步符合与北约标准STANAG和美国工业标准以及国防部MIL-SPEC标准兼容的标准。 此外,将为小型自动化系统开发军用通信协议,并将对这些系统的整体控制架构的接口标准进行研究。
IOP和AEODRS不是引入开放式架构和标准化的唯一活动。 以色列公司G-NIUS开发了为其ANA Guardium和AvantGuard系列开发的技术,而不是之前使用的12“盒子”,将机器人元件集成到一个单元中。 该主单元可以集成到任何地面车辆中,经过一些改进后,可以将其转换为ANA。 G-NIUS已经证明了它能够将各种平台重新制作成无尾配置。 今天它是装甲车BMP,M113和Stryker,HMMWV,福特F-350卡车和四轮摩托车。
与此同时,土耳其公司Aselsan开发了一个具有共同基础平台的ANA系列。 具有开放式架构的Kaplan模块化系统(老虎)能够接收各种设备。 这些主要是监视和侦察系统,用于对抗简易爆炸装置的系统,但武装配置也是可能的。
由于军队是美国全日空的最大用户,因此在确定其需求和引导资源的方式方面,它可能面临最大的问题。
陆军将其平台需求分为四类:可穿戴,可运输,自推式和附加模块。 他们还指望为营级及以下级别的无人机(包括小型无人机)开发通用控制器 航空 复合体。
士兵系统和无人地面系统部门负责人斯图尔特·赫特菲尔德中校解释说,为了确保五年预算内制定的所有项目都已完成,军队已经提前计划了30年的长期需求。
军队在这个问题上的战略构想设想建立由载人和载人团体组成的现代化部队,具有更好的防御,战斗稳定性和生存能力。 它还将减少士兵的身体和认知负担,使用新的战术并增加士兵的能力。
根据哈特菲尔德的说法,军队将通过在实施计划的方案之前重建和维持选定的紧急方案来实现这一目标; 由于班级内的一致性而降低成本; 使用现成的商业技术; 逐步引入单位自治; 最后,通过用户反馈,这是技术开发过程中不可或缺的一部分。
军队将其所有工作分为当前,新兴和未来的计划,每个计划都有不同程度的准备和资金。 目前资助的工作包括MTRS增量1,RONS和M160,而新兴需求(不保证完成)包括机器人增强计划(REP)。
REP是从士兵增强计划(SEP)复制而来,计划在2015年开始。 根据该计划,将为军队开放资金,以获得商业成品和成品实验系统,经过评估,可以获得向计划项目过渡的状态,或计划项目的内容状态。 哈特菲尔德中校说,这是由于业界担心有太多的示威活动没有任何投资回报。 “这不是计划中的计划的黄金票,但至少它为完成的艰苦工作提供了一些投资回报。”
其他短期(2015-2020)和中期(2012-2030)目标包括新的微型ANA,通用机器人系统 - 个人通用机器人系统(CRS-I),战术战术机器人控制器(TRC)和用于运输舱室设备的多功能系统小队多功能设备运输(SMET)。
作为由TRADOC学说发展和战斗训练部门进行的普通轻型自主机器人套件(CLARK)普通轻型机器人套件计划的一部分,新的微型系统正在开展工作。 根据CLARK计划,该部门将提供一套小型机器人系统,可以进行不同程度自治的短程侦察。 整套设备包括无人值守地面传感器,微型ANA和微型无人机(具有自主特性)。 包括公共控制器在内的所有组件的总质量可以约为4,5 kg。 开发的半自动超轻型侦察机器人Ultra Light Recon Robot(ULRR)旨在发挥微型ANA的作用。
CRS-I是陆军小型AHA计划(小型UGV -SUGV)的替代品,该计划于4月2013关闭。 军队正在寻找一种系统,与SUGV相比,其重量减轻了两倍,成本降低了两倍,并且正在等待批准这一要求。

Uralvagonzavod的远程控制战斗支援车辆被提供给俄罗斯军队
在分离层卸载士兵是无人驾驶系统的另一个可能的应用领域。 “我们向阿富汗发送了SMSS(洛克希德·马丁小队任务支持系统)车辆运输系统; 半自动系统跟随整个战场上的士兵并携带他们的装备。 但是,在测试和评估办公室 武器 和军事装备报告他们不信任该系统因此不能以半自动模式工作。 她到达现场,我们立即收到有关遥控器电池耗尽的投诉,系统操作起来不方便。 那么,系统设计有其缺点。 远程控制被证明是多余的,这是一种不必要的模式,当设备不跟随你时你应该使用它。 这完全改变了对他的看法以及他对士兵的看法。 该装置没有卸下士兵; 它是认知和体力消耗,因为它们必须放入武器,控制遥控器并控制系统,实际上它必须自己跟随它们。 为什么会这样? 因为评估和体验过这个系统的人对它没有信心。“
然而,SMSS 的开发尚未完成;该系统的测试仍在继续进行,包括与无人机的协同工作。 ANA和 无人机 是美军的一个特殊目标。
在军队列表中的其他主要系统中,有用于清除1和2路由清除和询问系统路线的系统,它们允许您远程控制高机动性工程挖掘机和RG-31机器(两者都配备有不同的工程设备和设备来对抗VCA)赫斯基安装检测系统(HMDS)上的探雷系统。 HMDS是一种操作程序,其中开发了一种从安全距离对赫斯基复合体进行半自动控制的系统。
认证和现有的安全措施可能会严重阻碍大型ANA的部署,尤其是其他系统。 “没有什么是完美的,我们永远不能部署无人地面系统和自动机器,并期望从它们无故障运行。 但我们必须培养这种信任和信心,以克服我们对一个人和一台机器的期望之间的文化障碍。“
这可能会导致自主自主移动系统CDD(现在称为自主车队运营 - ACO)出现问题。 ACO是一个可选套件,旨在将现有的人员平台转变为无人平台。 “我认为这是一个非常成功的项目,但存在问题......在我们是否已准备好采用这种方式的背景下,我不认为这是一个技术问题。 我发现我们将如何使用它,如何对其进行认证,如何使其安全,因为测试人员只知道如何测试内部人员的卡车,“Roberson中校解释道。
军队希望拥有的许多未来机会是作为取消的FCS(未来战斗系统)计划的一部分而开发的。 根据它,开发了一个通用的机器人平台MULE(多功能公用事业/后勤和设备),可以为各种任务重新配置,包括战斗支持平台。 在取消FCS之后,军队继续以武装机器人平台(轻型)ARV-A(L)(武装机器人车辆突击(轻型))的形式开发战斗版本,然而,该武器也放在架子上。
虽然美国陆军仍然需要一种有前景的战术作战全日空战斗机,但在其他军队中,这种系统已经投入使用。 ANA公司G-NIUS的几种型号都能够携带武器,Uralvagonzavod开发了一种跟踪系统,该系统被放入俄罗斯军队。
它专为监视和侦察以及直接和间接战斗支持而设计。 该设备配备了陀螺稳定的武器装置和一套光电子和红外设备。 据该公司称,该设备可以在高达5 km的距离内运行,并以高达35 km / h的速度移动; 还报告了加密的通信系统。
虽然基础平台的移动性可能是需要克服的低技术障碍之一,但解决这个问题非常重要。 “从我的角度来看,移动性存在于这个问题”平台能否跟上单位或士兵的步伐,系统实际上是给谁的?“......我看起来很宽泛。 我不能肯定该系统应该有轮子,轨道或腿。 这不是我的事,我的业务是看需求,看情况并提出一个可以在这种情况下工作的系统,“罗伯森中校说。
这不仅是为支持单位而设计的大型系统的问题,例如海军陆战队有腿支援系统的腿部支援系统。 这也会影响小型系统。 哈特菲尔德中校解释说:“移动性似乎是所有此类系统的主要问题,特别是由于我们将转向微观和纳米尺度。 对于微型全日空或被遗弃的机器人来说,所有在途中都是一个障碍,但如果它可以在地板上方停留一两米,那么它可以做很多事情并开辟新的世界。 空气和地球之间的界限消失了。“
后记
美国自动地面车辆市场
从伊拉克和阿富汗撤军,以及2月2013对美国陆军的彻底修改,导致全日空终端用户市场迅速下降。 根据分析,计划将2469 ANA转移到其他结构,并留下2700平台进行现代化和恢复。
在三月2014年预算2015五角大楼是根据它增加资金(RCSS)进行编程的机器人战斗支援机器人作战支持系统,将买M160,便携式系统的人可移动机器人系统(MTRS)有限公司II和机器人清除集成系统(RCIS )。 该合同还包括对地铁的升级,提供在RONS太大的情况下进行远程侦察和中和爆炸物的能力。
升级包括更换通信系统和不适合的零部件。 但是,AEODRS计划的融资方面有一些细微的变化。 生产开始日期推迟; Increment 1解决方案计划在今年的2015中期开始,在年度2016结束时开始生产,并且持续改进计划的实施延长到年度2019的末尾。
机器人地面系统项目,机器人地面系统,自动化技术的开发和演示,经历了少量的资金减少。 TS2 /机器人技术项目大幅减少,该项目创建,评估和研究自动化技术,使机器人能够为军事任务做出贡献。
启动了战术自动地面车辆战术无人地面车辆(TUGV)的新计划,其中包括常见机器人系统通用机器人系统(个人)的功能以及机器人系统开发和测试的许多其他新兴要求。
由于所有这些变化,市场的规模和结构发生了根本性的变化。 过去五年一直由伊拉克和阿富汗军事行动的销售主导。 在接下来的10年中,预计销量将大幅下降,但由于TUGV等主要计划的研发计划,有可能在2016之后出现增长。 假设在预计的十年期间的过去几年中,生产将增长,因为新一代模块化系统的大规模生产将开始满足不断增长的需求。
使用的材料:
www.janes.com
www.dtic.mil
www.auvsi.org
www.irobot.com
www.northropgrumman.com
www.stratom.com
www.uvz.ru
信息