地面机器人。 从跌落系统到无人驾驶车队(5的一部分)

上一段的最后几行顺利把我们带到了重地利用区 机器人这超出了纯粹的后勤任务。 我们将尝试进一步揭示这个内容丰富、有趣且内容丰富的话题,至少是部分揭示。
G-尼乌斯: 当然,以色列Elbit Systems和以色列航空航天工业公司之间的合资企业G-Nius在重型巡逻和武装机器人方面拥有最实际的经验。 她的第一台机器人设备Guardium后来改名为Guardium Mk.1,在2007年度投入使用。 Mk.1型号基于Tomcar越野底盘,Mk.2版本后来在逻辑上基于相同原产地的底盘,但具有400 kg承载能力,非常适合货物运输任务。 然后是基于福特F-3皮卡的Mk.350版本。 最初的Guardium仍在特拉维夫的本古里安机场巡逻,以色列军队从G-Nius手中收购了几架机器人。

来自G-Nius的Guardium Mk1已服役数年,在特拉维夫本古里安机场周边提供安保服务

来自G-Nius的Guardian Mk2有一个货物平台,您可以在其上装载400千克的耗材

混合多用途车(HMV)是G-Nius机器人系列中的最新选项,在欧洲2014展出

来自G-Nius的AvantGuard Mk 1基于Dumurs标签(Tactical Twohibious Ground Support)战术放大器; Elbit Systems的DBMS照片显示
更侧重于AvantGuard的战斗使用,它基于Dumur标签车辆(Tactical Twohibious Ground Support)。 采用Kubota涡轮增压柴油发动机和HP 1,75动力的四轨100吨底盘。 最大速度为20 km / h。 四条轨道各自具有0,91仪表长度和0,42仪表宽度,可提供低地面压力和最佳移动性。 吨位为1吨,可安装各种类型的模块,包括遥控战斗模块(SDM)。 在基于M2 BTR开发Mk113版本后,该机器人获得了AvantGuard Mk.1中的名称。
总的来说,在过去七年中,G-Nius机器人的工作时间超过60 000小时数,因此为公司提供了来自这些系统的运营商的宝贵信息。 欧洲2014的最新平台基于4x4机箱,每侧有两个动力装置。 它可以是柴油和电动发动机,可以让你得到一个混合动力单元; 因此,G-Nius将其命名为Hybrid Multipurpose Vehicle(HMV),以推出其最新产品。 原型机配备了桅杆光电站和Elbit Systems的战斗模块。 第一批G-Nius机器人配备了特殊系统,但目前以色列公司已开发出一套不依赖于平台的附加装置,将在相应章节中对其进行描述。
奎奈蒂克公司: 由于与各种国防组织的合同,包括特种作战部队的指挥,以及对自有资金的大量投资,Quinetiq开发了先进的模块化武装机器人系统Maars(模块化高级武装机器人系统),这是一种侦察机器人的武装版本。 由电动机驱动的履带式平台,加速至7 km / h,重量为165 kg。


来自Quinetiq的武装Maars机器人
实际上,这是一辆小型战车,配备7,62毫米M240B机枪,450发弹药和四轮40毫米M203手榴弹发射器。 该装置的行李箱是单独选择的,它可以发射致命的手榴弹,例如高爆,高爆炸性碎片两用或爆炸,以及非致命弹药,例如橡皮子弹,shot弹枪,催泪瓦斯,烟气,轻噪声和照明手榴弹。 力量的增加可以从非致命选项开始,例如,通过具有120 dB警笛的双向扩音器传输的语音消息,以及绿色激光上的警告装置,该装置可以警告或使潜在威胁眼花azz乱。 塔架可以360°/ s的角速度旋转155°,垂直指向角为-20°/ + 60°。 旋转支撑设备上的光电子站可提供360°12度视野,该站点包括具有x75数码变焦和320°视场的日用相机以及具有240x2分辨率,x36数码变焦和XNUMX°视场的热成像相机。 这些参数等效于指挥官全景潜望镜的特性。 短歌; 与机枪同轴安装的“箭头”瞄准镜是带光学变焦x26和数字变焦x12的日用摄像机以及分辨率为640x480,视场角为47°FoV和数字变焦x4的热成像摄像机,可在夜间或恶劣条件下瞄准; 激光测距仪测量到目标的距离,并将其传输到火控系统(LMS)。
可以添加镜头定义系统以向LMS提供目标数据。 “飞行员”依赖于具有95°视野的前后昼/夜摄像机。 工作时间从3到12小时不等,具体取决于执行的任务; 集成睡眠模式可让您通过将电池寿命延长一周来节省电池电量。 可以使用公司大多数机器人常用的QinetiQ Tactical Robotic Controller战术控制器或通过Toughbook笔记本电脑控制器笔记本电脑控制Maars。 系统始终由操作员控制,操作员可以通过手控器上的特殊按钮立即关闭电源。 目前,五个Maars单位正在测试美国海军陆战队,后者根据经验处理技术战术方法描述。 将来,QinetiQ正在考虑处理语音命令,以减轻运营商的负担。
诺斯罗普格鲁曼: 基于Camel物流机器人,诺斯罗普格鲁曼公司开发了一个名为Madss(移动武装下马支援系统 - 移动武装步兵支援系统)的武装平台。 由于其重载荷,该平台能够接收中口径武器,在这种特殊情况下,安装在作战模块中的7,62-mm机枪M240B。 还提供替代武器,例如40-mm MK-19自动榴弹发射器,重机枪M2,轻机枪M249,以及具有小后坐力的25-mm和30-mm枪。 也可以安装非致命系统,例如FN Herstal FN303。

移动武装下马支援系统或MADSS是骆驼机器人的武装版本; 在火灾测试中的照片

土耳其公司Gate Elektronik开发了Robas,它有四个旋转轨道,可以克服各种障碍,包括台阶
Gate Elektronik: 在重型平台中,由土耳其公司Gate Elektronik开发的Robas机器人具有相当不寻常的架构。 其特征在于四个缩短的轨道,每个轨道由连接到驱动链轮的电动机驱动; 张紧链轮是弹簧加载的,以便更好地承受履带张力。 在机器人中不寻常的是,每个发动机都允许您转动履带来改变迎角,以便最佳地克服这些步骤,以及越过障碍物。 Robas设备能够克服障碍物高度800 mm。
一组电池可确保自动操作4小时,最大动作范围为25 km,最大速度为10 km / h。 控制台的范围是一公里。 空Robas机器人的质量为250 kg,其承载能力为150 kg。 这允许您安装不同类型的系统,例如稳定武器,光电子站,监视雷达,地雷探测工具包,消音器等。


来自Oto Melara公司的武装机器人平台TRP2 FOB接近他们的资格,但可能会错过在阿富汗部署的时间
Oto Melara: 虽然小型TRP3 NEC是为步兵部队设计的,但Oto Melara TRP2模型是一种更重,更高效的系统,可增强意大利军队情报单位的情报和信息收集能力。 然而,阿富汗的情况非常严重,因为在这里,守卫前线作战基地的士兵的风险非常高,因此必须加快建立一个旨在巡逻这些基地周边的武装机器人的进程。 TRP2 FOB(也称为TRP2 Combat)是从现有平台修改而来的,该平台已包含大部分所需参数,例如拆卸成便携式模块的能力。 毛毛虫驱动无刷电动机,使其达到15 km / h的速度。 锂离子电池可持续使用4小时。 除了GPS /惯性系统之外,第一个自主导航模块的安装是为了绕过障碍物,显着降低了操作员的负荷,尽管在中间点导航模式下工作时非常必要。
为了在沿着楼梯移动时增加机器人的移动性,与先前的原型相比,轨道的长度增加并且增加了强力的尾臂。 该系统由模块化控制单元控制,该控制单元由操纵杆,通信单元和硬化计算机组成。 操作员不仅控制机器人的运动,更重要的是,负责从机上开火 武器通常,这是Beretta ARX160 5,56 mm突击步枪或相同口径的FN Minimi轻机枪或单发40-mm Beretta GLX160榴弹发射器。 桅杆安装在其后面,在旋转装置上,其上相机附有变焦,用于捕获目标,以及固定的广角相机,其向操作员提供前方地形的图像以及机器人本身的前部。 武器寄存处安装了窄场光电子学:左侧是日间摄像机,右侧是DRS Technologies的非制冷热像仪。
该系统已在Nettuno的军队训练场进行了全面测试;超过3000小口径弹药筒和100手榴弹被击落。 TRP2 FOB机器人配备了一个用于升起自动武器的远程驱动器,这使得它可以完全安全地离开基座,因为第一个盒子只有在到达目标区域时才被送入腔室。 至于机动性,机器人已经达到了很多公里; 此外,还测试了克服福特的可能性,并展示了超过一公里的范围。 Oto Melara组织了两次40讲师培训课程。 意大利军队订购了八个这样的机器人,但由于类型资格被推迟,只提供了两辆车。 预计在7月底进行初步技术检查,之后可以将一个系统发送到运行单元进行测试,第二个系统完成电磁兼容性测试。 鉴于意大利特遣队即将离开阿富汗,TRP2 FOB机器人不太可能在那里部署。

TRP2 FOB机器人武器的中间地带,由5,56-mm自动武器和单发40-mm榴弹发射器组成

虽然保留了TRP2标识,但TRP2 Rista机器人有一个完全不同的底盘,不像TRP2 FOB; 它配备了Selex ES的Mini Colibri触控套件
TRP2 RISTA机器人(侦察,情报,监视和目标获取 - 目标的情报,信息收集,观察,探测和劫持),也称为TRP2骑兵,底盘略有不同。 它的特点是毛毛虫呈倒梯形状,在沿着楼梯移动时保证了良好的移动性。 由于机器人设计用于执行特定的侦察任务,因此可以将其拆卸成背后的每个模块,重量小于20 kg,如果需要,可以将其放弃以便通过汽车运输到起点。 最大战斗重量约为90 kg,平坦表面上的15 km / h速度。 车载设备以Selex ES的光学电子站Mini Colibri的形式呈现,它在受电弓式的臂上升起。 传感器套件包括一个非制冷红外热像仪,320x240分辨率,4,6°视野,日常CCD摄像头,2,4°到46°视野范围增大,4000测量范围的激光测距仪对眼睛安全。 臂可以旋转±180°,传感器头的倾斜角度为±40°。 该机器人将为该机器的Freccia Explorer 8x8版本提供短程侦察能力,该机器将与意大利军队的侦察部队一起投入使用。 从Oto Melara委托Horus UAV进行远程情报,可以从120毫米口径枪管发射,或者从Freccia Explorer侦察版上安装的相同口径的光管发射。
Oto Melara还开发了一种TRP2 HD机器人(重型 - 恶劣的工作条件),面罩约300 kg,有效载荷为100 kg,目的是取代意大利武装部队使用的现有爆炸性弹药处理系统。 HD型号的武装版本可配备大口径武器,7,62-mm机枪或其他武器系统。 TRP2 HD也部分由经济发展部资助,因为它提供发展和民用选择。
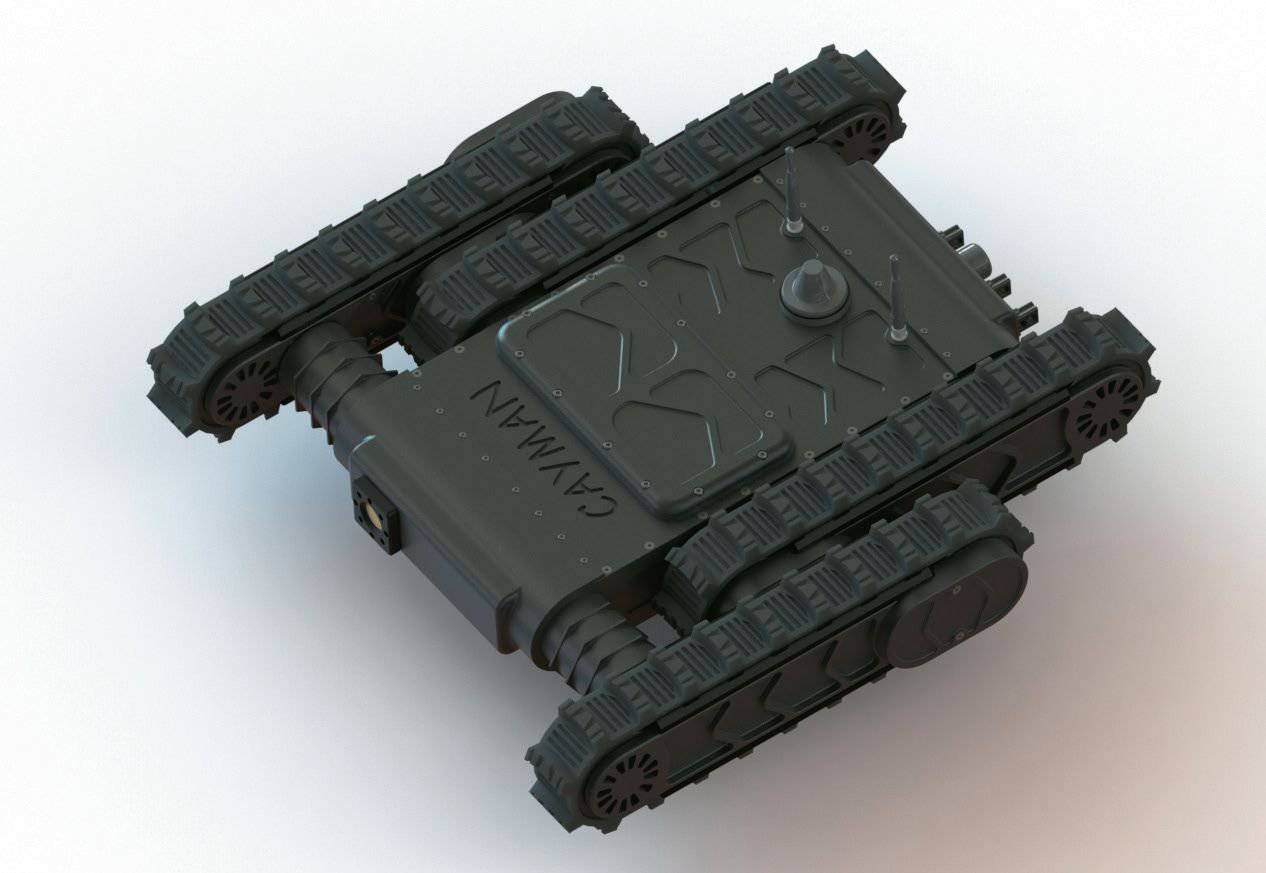
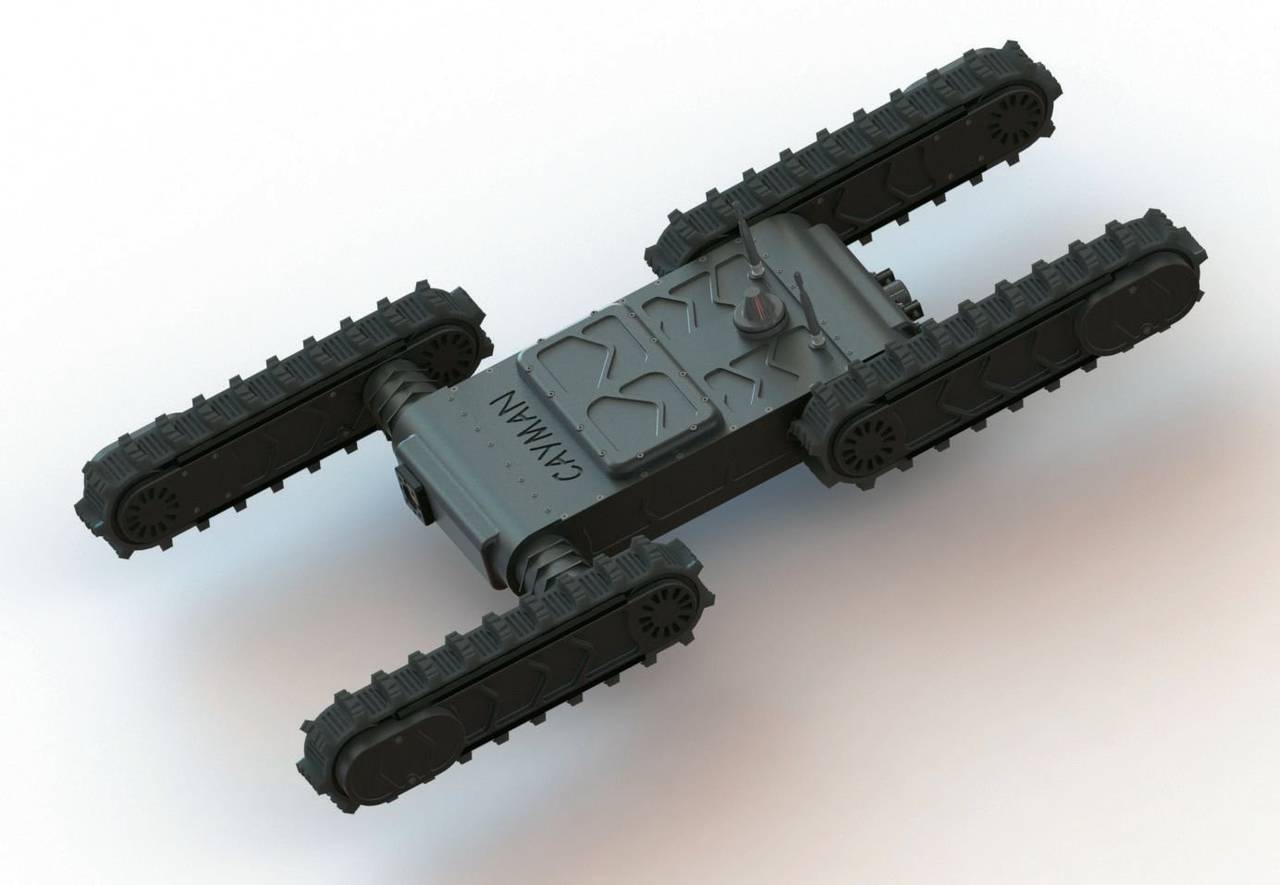

Cayman机器人与Tecrdon的不同之处在于四个旋转轨道,这使得机器人能够克服困难的障碍,而其架构允许在运输过程中显着减小其尺寸。



与其预告片一起,来自Tecdron的Quator可以携带高达150 kg; 平台重量29 kg的显着数字
Tecdron: 在重型地面机器人类别中,法国公司Tecdron提供三种系统。 其中第一个,Cayman机器人具有相当奇特的结构,因为其四个轨道中的每一个都旋转其自己的电动机。 折叠时,两个后部轨道沿着设备主体转动并锁定,由符合公司传统的飞机合金制成,而两个前部轨道沿内部轨道折叠。 为了使机器人能够沿着台阶自由移动,在底盘中安装了两个引擎,使轨道旋转。 不寻常的跟踪解决方案可让您获得最佳的移动性,Cayman机器人能够应对55°斜坡并沿50°斜坡移动。 最高速度为6-8 km / h。 机器人重量为26 kg,可以接受重达20 kg的设备; 该设备防水深度为一米,其所有表面都经过防腐蚀处理。 其他设备可以由Tecdron或客户集成; 该机器人的即插即用界面目前正在开发中。
标准传感器包括带LED背光和麦克风的前置广角摄像头; 但是,为了提高可视性,第二台摄像机安装在一个短铰链臂上(手持摄像机折叠到机身内,并在操作过程中升到地面以上,高度约为350 mm)。 数据通道提供一公里的直接视线(城市中的300米)。 操作员使用带7英寸屏幕的迷你控制台或硬化笔记本电脑来控制它。 具有12 Ah容量的20锂离子电池可连续工作3小时,但这次使用的第二块电池增加了一倍。 Tecdron提供各种车载设备,例如带有x36放大倍率的全景头上的摄像机,热成像摄像机,激光测距仪,气体传感器等。 Cayman在欧洲2014上首次亮相,但潜在用户已收到的评论无疑将导致下一个改进版本。
与Tecdron产品组合中的Cayman相当的是Quator 4x4机器人,重量为29 kg,车轮直径为260 mm。 驾驶性能略逊于跟踪模拟,但它仍然可以应对45°斜率和40°侧斜率。 它可以克服高度为200 mm的障碍物。 它与卡特彼勒Cayman具有相同的传感器组,唯一的区别在于安装在后面的第二个摄像头。 锂离子24伏特电池具有较大的30 Ah容量,其充电持续4小时。 Quator可以承受高达50 kg的重量,并以100 kg的载荷拉动拖车。 一个特殊的固定器允许您使用后置摄像头将拖车连接到机器人。 Quator配备相同的数据通道,可以接受与Cayman机器人相同的硬件。 该系统在大规模生产中得到全面实施,法国军队也是其用户之一。 对于Quator来说,正在开发一种毛毛虫,以及一种机械臂,它正处于开发的最后阶段。
Tecdron机器人冠军是Quator XL 4x4。 虽然他的名字与前一个机器人的名字相似,但前缀XL说明了它的重量260 kg和承载重量500 kg的能力。 它的主要任务是为步兵运输设备,但可以在其上安装侦察设备。 每个直径为390 mm的车轮都从1500 W电动机旋转,当乘以4时,它提供了良好的牵引力并能够克服40°斜率和35°侧斜率。 垂直障碍物的高度为300 mm,而最高速度为15 km / h。 与之前的型号一样,远程控制也可以在最远一公里的距离内进行,尽管半自动系统将集成到Quator XL中,Quator XL仍处于最终阶段。 该机器人具有Tecdron机器人的典型特征,涉及建筑材料,传感器和人机界面。 Quator XL是一款完全成品,但Tecrdon正在测试新的车轮选项,旨在改善困难地形的地形。
对于困难的地形,Tecdron提供Scarab LX,215 kg履带系统,具有200 kg承载能力,能够克服40 mm高度的垂直障碍物。 该机器人虽然适用于侦察任务,但在排雷作业和危险区域的短程检查中可能特别有用。

来自Tecdron的Tracked Scarab LX
约旦电子后勤支持:制造商的名称告诉我们,作为多任务平台提供的Lynx跟踪系统是在约旦开发的。 底盘重量为120 kg,由两个电动机驱动。 带有驱动器的双色CCD相机安装在前后。 提供各种车载设备套件,包括机械臂,爆破装置,叉车,全景头上的摄像头,x26光学变焦和x12数码变焦。 排雷选项称为Lynx-E / J. Lynx-C是一种具有遥控战斗模块的战斗配置,您可以在其中安装M16步枪,7,62-mm机枪或火箭发射器。 Lynx机器人是Jelson Soldier Modernization Program Jels的一部分,旨在整合到该系统的信息管理结构中。
KADDB:另一家约旦公司KADDB在Sofex 2014展会上展示了6xXNNXX配置中的新型多功能机器人多功能机器人(MFR),其中每个轮子都旋转其电动机。 前轮和后轮从船体延伸,这使得可以克服角度为6°的事实上的障碍物。 MFR可穿过深度为90 mm的浅滩,宽度为150 mm的沟槽和达到450 km / h的速度(减速12 km / h)。 电池提供三个小时的工作。 除了标准的两个受控摄像头(一个在前面,一个在后面)和一个带麦克风和扬声器的双向音频系统外,MFR机器人还可以配备各种设备和武器。
在展览会上,机器人展示了一个炮塔。 广告宣传册谈论800仪表的范围,虽然公司代表坚持两公里。 一个optron瞄准摄像头安装在炮塔上,操作员可以根据目标的比较尺寸来测量距离 - 一个人,一辆小型车,一辆大型车,一个建筑物 - 因此没有激光测距仪。 炮塔装备有俄罗斯 - 约旦发展的两个RPG-32 Hashim火箭发射器。 压电点火确保200启动。 可以添加7,62-mm机枪。 MFR机器人仍处于原型阶段。 虽然目前尚不清楚这种新的地面系统是否会取代过去所展示的机器人。


约旦公司KADDB开发了一系列不同类别的地面机器人。 在SOFEX 2014展览会上展出的MFR机器人配备了两个火箭发射器(如上图所示)
俄罗斯军队: 俄罗斯最近展示了一种武装机器人,旨在部署在战略导弹部队中,以增加敏感地点的安全。 该机器人获得了MRK-002-BG-57的名称,它基于履带式底盘,整个系统重约1100 kg。 开发公司的名称未命名; 最有可能的是,该机器人具有混合动力推进系统,动力储备为250 km,最大速度为35 km / h,持续时间为10小时。 发电厂位于稳定的作战模块后面,安装在机器人平台的中心。

为了提高其战略导弹部队的安全性,俄罗斯用重型机枪开发并装备了履带式机器人平台MRK-002-BG-57
根据俄罗斯消息来源,机器人能够在自动和半自动模式下瞄准,跟踪和射击目标。 炮塔配备白天,红外热像仪,激光测距仪和弹道计算机,雷达系统可用于远程观察。 引导式摄像机也安装在机箱上。 各种武器可以安装在机器人上,卡拉什尼科夫7,62x39带500弹药筒或12,7-mm机枪带30弹药筒或30-mm自动榴弹发射器,或AG-17A或AG-30。 在视线范围内,保证距离最远可达5公里。
信息