地面机器人。 从跌落系统到无人驾驶车队(3的一部分)

通过获得六轮配置和射击手榴弹的能力,家庭的高清模型 机器人 Nexter Nerva 也获得了神经以进行更多的肌肉锻炼
中型机器人的规模和质量正在逐步增长,以便他们可以携带大量的群众,并且他们可以迈出一定程度的自治,尽管他们距离嵌入任何人工智能还很远。

由QinetiQ为美国海军陆战队开发的平均重量类别Dragon Runner 20的冠军。 在已安装轨道扩展的照片上
iRobot公司: 除了之前描述的小型110 FirstLook机器人之外,iRobot目录中还有更大的机器人,这些机器人是从原来的510 PackBot演变而来的。 成千上万的这些机器人在伊拉克和阿富汗接受了真正的服务。 地面作战系统(GCS)地面作战系统计划包括一个小型可穿戴地面机器人,可以为危险区域的步兵部队提供自主侦察能力。
封闭式GCS计划的一个副作用是310 SUGV系统,它具有典型的iRobot架构,带有履带式底盘和履带式鳍状肢,可确保在克服楼梯和其他障碍物时具有良好的机动性。 如果需要更窄的配置(将宽度从437减小到348 mm),则移除鳍状肢。 没有安装设备的重量是13,2 kg; 310 SUGV可以达到10 km / h的速度并克服305 mm高度的障碍,它的两个BB-2557 / U电池可确保1,5小时的连续运行,尽管两个BB-2590 / U电池可将操作时间延长至6小时。 带有红外照明的广角(107°)前置摄像头机箱用于驱动机器人。 用于侦察目的的主要传感器是安装在手动操纵器上的彩色摄像机,用于低照度,x10放大倍率(从48°到5°的视野)。 2,4 GHz通信通道在开放区域提供1000操作半径,操作员使用可穿戴控制器,其中包括Tac-Eye头盔护目镜和流行的手持控制器(可选配带5,6英寸显示屏的硬化控制器)。 大量的310型号用于美国和外国武装部队。
XM1216 SUGV比前两款车型略大且重,在没有设备的情况下重量为14,5 kg。 它拥有该系列三款机器人中最有效的远程智能设备:配备x26光学变焦和x12数码相机的彩色摄像头,以及带三步数码变焦的热成像摄像头。 所有这些机器人都可以配备机械臂,用于处理爆炸物。
Quinetiq: 此外,在小型自动地面车辆类别中还有另一个系统 - 由Qinetiq North America制造的多任务Dragon Runner 20机器人,用于进行侦察和排雷。 这个机器人最初是为美国海军陆战队设计的; 它的重量是9,07公斤,最大速度是6,5公里/小时,前后都有日夜两用摄像头,侧面只有日间摄像头。
通过增加带变焦,全向麦克风和扬声器的全景相机,可以大大增强智能功能,以提供双向通信。 为了提高移动性,可以安装履带式延长线和后稳定器以克服这些步骤。

在中间类别,iRobot提供其310 SUGV机器人; 在照片中“行走”,携带用于中和爆炸物的装置

MacroUSA的Scorpion尽管9 kg的重量仍然被遗弃,其有效载荷相当于它自身的重量
MacroUSA: 在同一类别中,MacroUSA提供Scorpion 9 kg履带式机器人,由于采用塑料和铝制增强材料制成的高抗冲击性底盘,可以将其放入感兴趣的区域。
标准触摸套件包括一个前置日/夜彩色摄像机,具有185°视野和±60°倾斜角度,红外和传统LED灯,后置彩色日夜两用摄像头和麦克风。 蝎子可以达到10 km / h的速度,并从一米高处掉落。 它可以传输质量等于其自身质量的装置,包括热成像仪或化学传感器,以及用于处置弹药的操纵器或装置。
ECA机器人: 在中等类别中最轻的机器人中,Cobra Mk2多任务平台的重量为6,1 kg,有效载荷为5公斤,由着名的法国公司ECA Robotics提供。 该公司提供各种附加设备,如CBRN模块(化学,生物,放射和核能) 武器)具有化学和放射传感器和辐射剂量计,用于中和爆炸物体的模块,其具有容纳各种类型的中和装置的支架,当然还有带有360°视角的摄像机的侦察模块。 机器人还有一个彩色CCD摄像头,前面的视角为±80°,后面有一个固定的彩色摄像头。 此外,还有白色和红外LED,麦克风和用于双向声学通信的扬声器。 Cobra Mk2 4x4配备低压轮胎; 15伏特上的锂离子电池可确保2,5小时的运行时间。 最大速度为5 km / h,克服障碍物150的最大高度。 开放区域规定的工作距离为250米; 有两种不同的控制单元可供选择,一种采用7英寸屏幕,另一种采用10英寸屏幕,这些设备的操纵杆设计也不同。



法国ECA公司开发了机器人眼镜蛇Mk2,其中第一个军事客户是加拿大。 机器人可以由特殊控制单元或商业系统控制,例如智能手机。

MTGR(微型战术地面机器人)是由Roboteam开发的多功能机器人,可以安装大直径轮子

图中的MTGR机器人展示了它在夜间撬动的能力。 他清晰的跟踪系统让他可以采取一种杂技姿势
ECA Robotics的最新创新之一是能够使用基于Android OS的平板电脑和智能手机来控制机器人,从而减轻士兵的负担,因为这些设备可用于各种目的。 这不是唯一的改进。 现在Cobra Mk2配备了GPS系统,允许机器人记忆路径并自动返回发射场。 安装了直径较小(小于20 mm)的车轮,以避免在车下进行机器人检查时出现问题; 现在还可以使用一组轨道来提高复杂地形的通畅性。 加拿大成为Cobra Mk2机器人军事领域的第一个买主,它为20机器人订购了更多的80机器人。 加拿大要求使用带有可拆卸光纤遥控系统的系统,该系统允许您使用Cobra Mk2机器人,距离可达1000米。
ROBO-团队: MTGR(微型战术地面机器人)由以色列公司Robo团队开发,作为一个多任务机器人,主要任务是为主要步兵部队提供情报。 对于城市中的工作,MTGR具有完全跟踪的配置,而对于越野驾驶,这种配置得以保留,但增加了直径更大的车轮,在克服污垢,石块和台阶时提高了吞吐量。
显然,增加通畅性在质量和尺寸方面是昂贵的。 标准版重量为7,3 kg,轮式/履带式重量为8,6 kg,尺寸也从455x368X145 mm增加到472x470x165 mm,但系统仍然完全便携。 MTGR可以在操作员在少于60秒内接通并达到3,2 km / h的速度后开始工作。 机器人可以克服高度为35 cm的障碍物,45°的斜率,由于额外的履带式鳍状肢,高度为20 cm的台阶。 MTGR机器人配备了五个摄像头,前者安装在一个壁龛中,倾斜角度为-20°/ + 90°,其他安装在机箱周围,为操作员提供360°的圆形视图。 LED白光仅安装在前面,而光谱的近红外区域的照明是圆形的。 MTGR机器人可以配备专门由Robo团队创建的机械手,通过添加系统将其转换为中和爆炸物的手段。 它有四个自由度,有两个万向节,一个腕关节和手柄。 360机械手的最大偏差为mm,承载能力为5,4 kg。 这只手有两个摄像头:一个带有x10放大倍率,另一个带有第二个近中心摄像头,两个都有红外照明。 其他传感器,如辐射探测器,气体分析仪,热成像仪等。 由于picatinny指南,可以轻松地与平台集成。 机器人的通信通道可以与其他设备形成网络,允许您在直接视线范围内将范围增加到超过500米; 电池寿命为2至4小时。 节点网络的概念目前受到新解决方案的压力,例如,在士兵的背心中包含收发器,以及机器人在进入之前可以留下的收发器的开发,例如,下水道管道或隧道以确保可靠的通信。
至于完全自治,Robo团队认为在此之前不少于十年。 然而,为了使操作员尽可能简化MTGR,该公司开发了几种预设模式,用于克服步骤,提升负载等,这显着减少了人为干预。 通常,MTGR机器人随附Rocu-7控制台,该控制台在Windows 7上运行,具有7英寸屏幕,分辨率为1024xXNNUMX。 Rocu-600控制台有两个操纵杆,八个硬件按钮和四个摇杆式按键; 它的重量为7 kg,电池允许您工作三到六个小时。 美国国家标准与技术研究所进行的测试结果导致美国特种作战部队指挥部迫切购买了一些未命名的MTGR机器人。 军队正在研究该系统,以便部署在标准步兵部队中。 MTGR也在服务于以色列武装部队,Robo团队正在努力将机器人移动到世界各地。
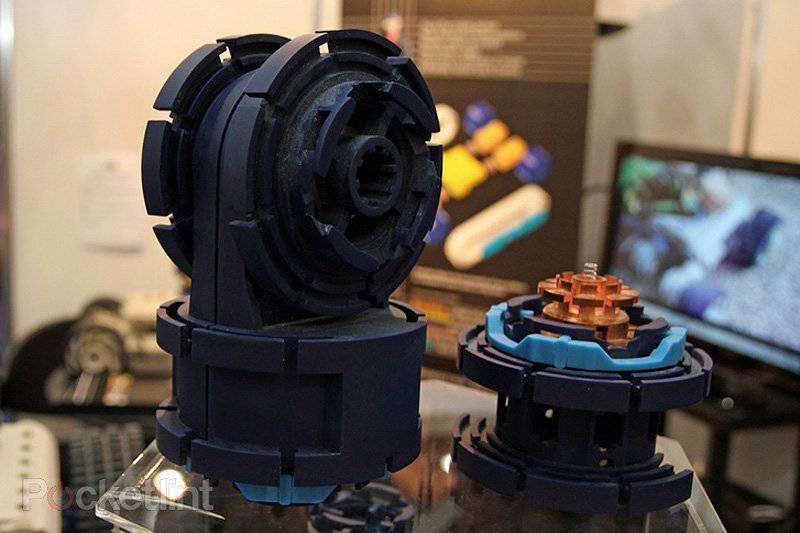
Nexter: Nerva系列的重型成员是HD(重型)重量11 kg。 它包含许多轻型机器人的元素,但有效载荷增加到10 kg。 在Nerva HD模型中,保存了通信通道,单击概念,两个速度以及为LG和S模型开发的更多元素。但是这个机器人可以部署在三种不同的配置中:4xXNNUMX,4x6和跟踪。

Nexter最老的Nerva系列高清机器人具有用于板载硬件模块的双插槽6x6机箱。 在机器人安装的榴弹发射器模块上的照片
在4x4配置中,机器人上安装了直径为300 mm的特殊车轮,增加了在崎岖地形上的机动性。 此外,为了克服复杂性增加的障碍,可以安装两个脚蹼而不是中间轮。 为了获得6x6配置,四个大轮子被替换为直径为150 mm的标准轮子,与Nerva LG相同。 安装橡胶履带时,两个中央轮成为导向装置,仅作为履带支重轮工作。
标准触摸套件包括一个高分辨率前置摄像头,带有可见光和红外光的110°视野和一个后置摄像头,以及一个全向麦克风。 与较小的机器人相比,HD型号拥有更完整的导航套件,其中包括GPS,里程表,磁罗盘,三个陀螺仪和三个加速度计,该设备还兼容差分GPS系统。 当在几种半自动模式中的一种模式下工作时,关于确切位置的这种数据是有价值的,例如,它是通过路线点,自主巡逻和自动返回起始地点的导航。 与LG Nerva相比,HD型号有两个用于标准Nerva功能套件的插槽; 但是,车载设备可以通过Picatinny导轨或可配置的金属板连接。 HD型号具有以太网,USB,RS232连接器,数字I / O插槽和视频输入。 Nexter开发了几款带有Nerva接口的套件,包括用于远程监控的全景头上的x36变焦摄像头,非制冷热成像摄像头,可将两小时自主时间加倍的额外电池,双向对讲机,用作入侵响应的烟雾发生器或指示器位置和几个CBRN传感器。 运输模块允许您执行小型物流操作,此外,公司还可以提供排雷工具。
M-Tecks: 另一家法国公司M-Tecks Robotics开发了几款轻型两用地面机器人。 Symmetric Arthron POD 125A 4x4从2,5仪表的高度可以毫无问题地下降。 它的对称性不仅限于物理设计,还扩展了其传感器:两个彩色摄像头和一个夜间摄像头和两个白光LED灯安装在前后。 12,8伏特上的热插拔电池的容量足以进行一个半小时的工作。 使用标准15-mm车轮,最高车速为170 km / h。 车轮可能因特定地形而异,但在这种情况下,由于各种原因(包括紧张的定价政策),未能预见到快速更换。
POD 125A机器人通信通道可确保在开放区域内运行300仪表,在城市丛林中运行多达250米。 然而,通信架构是为大规模运营而创建的,因此当多台机器部署在更大的区域时,可以实现M-Tecks机器人地面机器人的全部潜力。 127机器人可用于创建网络,每个网络都可用作网络节点,从而增加了范围和功能灵活性,尤其是在城市峡谷中。 POD 125A机器人配备了GPS系统。 M-Tecks Robotics也没有忘记管道检测机器人,并为他们的侦察机器人留下了线控制选项。 对于POD 125A,可以在距30米的距离进行线控。


法国公司M-Tecks Robotics开发了一种机器人Arthron Pod 125 4x4,它具有通信系统,可以让您形成这样的设备网络127

Arthron R 4075拥有独特的建筑风格。 模块使用通用铰链连接,这使得8 x8机箱可以旋转和弯曲,并显着提高了移动性
在难以到达的表面上寻找增加的移动性的过程中,M-Tecks Robotics开发了一个更大的9 kg机器人。 他获得了R 4075A的称号,其八轮架构相当不寻常。 机器人由四个单轴模块组成,这两个模块通过万向节相互连接,允许您分配来自主发动机全轮驱动的扭矩。 多铰链设计经过五年的发展,显着改善了垂直平面的转弯和弯曲,从而提高了机动性并克服了三次障碍。 主电动机安装在一个中型“驾驶室”中,15伏特上的主要标准镍氢电池的容量为6800 Ah,保证了两个小时的工作,安装在另一个中。 两个极端模块具有辅助发动机,其提供它们与相邻模块之间的相对运动。 因此,确保了多连杆结构的可操纵性,这允许其在复杂地形上实现最大的移动性。 R 4075 A可以应对高度为300 mm的障碍物和270 mm沟槽,以及克服高达100%的斜率。 标准车轮的直径为140 mm,此外,还可以安装不同类型的轮胎。
两个日间摄像机,上部摄像机向上,下部摄像机向下,允许获得组合的垂直视场160°。 一夜摄像机水平指向,两个白色LED灯在需要时提供良好的照明。 视频传输由2,4 GHz频率的信道提供,控制信号通过869 MHz信道传输,开放区域的传输距离为300米,城市建筑物的传输距离大于100米。 与其较小的兄弟一样,R 4075A机器人可选择最远50米的线控制。 操作模式包括半自动遥控,显着降低操作员的负荷,甚至自动模式。 提供视频稳定软件,以及带彩色或夜间摄像头的圆顶装置。
POD 125A和R 4075A型号均由2,5 kg控制台控制,配有9英寸屏幕和操纵杆。 目前,这两个系统的原型正在法国军队中进行测试,这些测试中获得的经验将被整合到仍处于开发阶段的设计中。
Robosynthesis: 当然,在“轻型”地面机器人部分中描述的该公司的模块化系统可用于制造更大和更重的机器人。 这方面的一个例子是称重9,5 kg的多任务EXTRM平台,其最大速度从1,5到6 km / h不等,具体取决于推进装置的类型。 总高度仅为200 mm(车轮直径),机器人可以在安装尾杆时克服高度为450 mm的障碍物,处理40°的横向斜坡,并且如果有足够的抓地力,则可以倾斜至50°。
通信信道可以以2,4或5,8 GHz的频率工作,提供一系列1000表; 电源为两节可充电锂离子电池,BB2590 / U或BB2557 / U,分别提供12小时或3小时的工作时间。 操作员根据来自具有640x480分辨率的固定焦距和红外照明的广角相机的图像来控制机器人。 对于侦察目的,有一个全景光电子套件,它包括四个不同焦距的内置微镜,从7,5°到60°逐步增加视野,0,008 Lux的灵敏度使您即使在非常低的光线下也能获得良好的图像。
与Robosynthesis的所有系统一样,最新版本的EXTRM配备了多个通用连接器,您可以使用它们连接各种类型的设备。 在Sofex2014展会上,该公司推出了Robocube 4x4。 它比EXTRM更轻更小,顶部有六个通用连接器,两侧有两个。

机器人合成已经开发出一种模块化的EXTRM系统,可以在其上安装尾部牵引力以克服更高的障碍。

Robocube曾在Sofex 2014上展出。 这是另一种中型机器人,有八个连接器,用于安装额外的电池或设备。

由Robosynthesis(上文)开发的通用连接器的中间接地,允许设备的机械和电气连接以及数据传输的可能性(下面是实际实现)


Tecdron的天蝎座对于三轮机器人而言相对较重; 它的设计注重操作可靠性
Tecdron: 法国公司Tecdron再次拥有各种各样的地面机器人,从轻到重。 具有遥控功能的战术三轮天蝎座机器人以5,9 kg进入中间类别。 从8月2013计划的最初阶段开始,该公司就优先考虑耐用性,图像质量和范围,这导致与为类似任务设计的机器人相比,创造了更重的机器人。 天蝎座底盘完全由飞机级铝制成; 它的防水深度为2米,并涂有防腐涂层。 它可以抛出十米而不会损坏其组件。 两个电动机为其供电,后轮用作稳定器。 机器人可以克服35°斜率和30°侧斜率; 直径为180 mm的橡胶轮使其在难以处理的表面上具有良好的渗透性,例如灰尘,碎石或沙子。 12锂离子电池具有5,8 Ah容量,可连续运行4小时; 第二个可选电池使运行时间延长一倍。
正面是一个广角日/夜倾斜摄像头,红外LED照亮路径,麦克风用于录音。 图像和声音通过数字通道传输到控制站,控制站由五英寸显示屏,操纵杆和几个按钮组成。 在视线范围内,范围是300米,在城市区域和建筑物内部,半径限制为100米。 天蝎座可以使用8千克的设备,虽然这不是它的主要目的。 目前,他已在法国警方接受了数月的测试。 军队经历过特殊部队,唯一的缺点就是群众。 较小的Vixen平台尚未向公众展示,因为Tecdron目前正在以多种方式改进它,并且预计在2014结束时会有新配置的原型。
信息