地面机器人。 从跌落系统到无人驾驶车队(2的一部分)

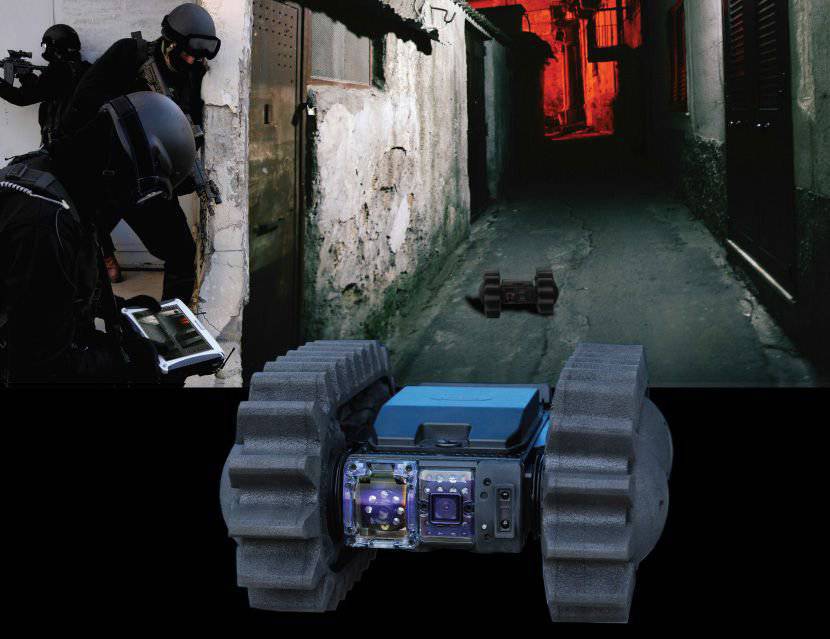
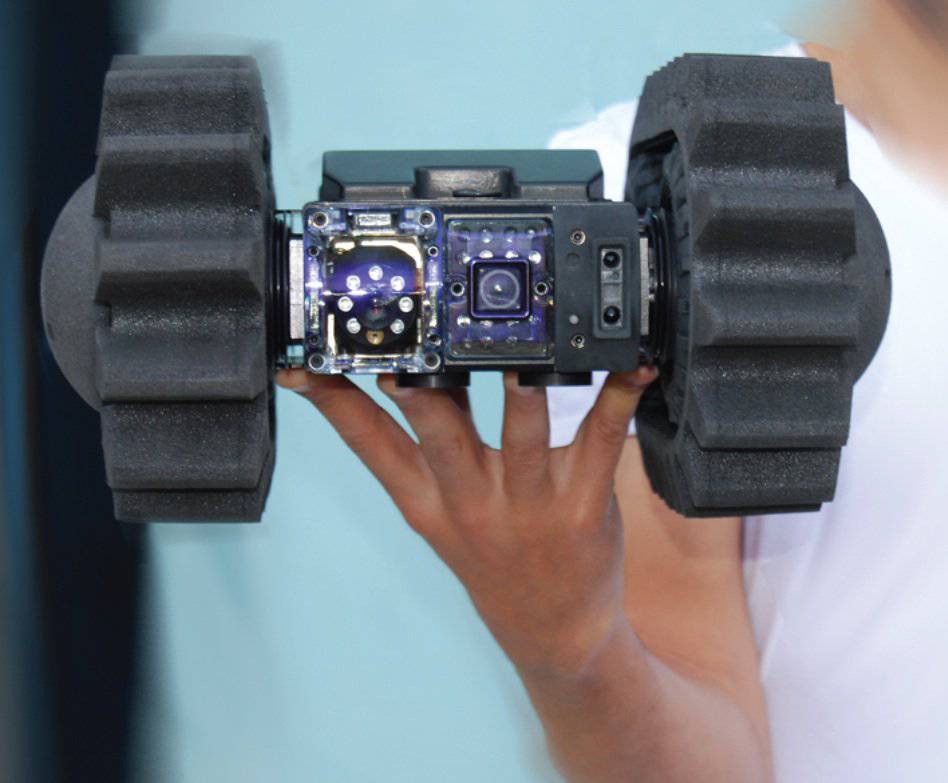
德国Optimess公司开发了一种两轮iSnoop,它配备了两种类型的轮子,其中一种设计用于在楼梯上移动
OPTIMESS: 德国Optimess公司在浇注料领域发展 机器人 新的 iSnoop 产品。 它提供不同的轮组,以便在不同表面(包括台阶)和所需速度上获得最佳机动性。 其无线通信系统提供室内 50 米范围和室外 200 米范围。
具有平移功能的高分辨率相机捕获视频图像,麦克风收集声学数据。 除了标准摄像头外,还可以安装其他设备,如气体分析仪。 iSnoop可以连续运行长达两个小时,机器人处于开发的最后阶段,将在2014年度上市。
ROBO-团队: 几年前,以色列公司Robo团队展示了一个轻巧的废弃机器人,其中有一个可爱的首字母缩略词Iris,意思是个人侦察和情报系统 - 一个个人智能和数据收集系统。 他用两节AA电池称重一公斤,提供4-6小时的操作; 发射是使用吊索式投掷系统进行的。 随着时间的推移,Iris已经发展成为一种预生产产品。
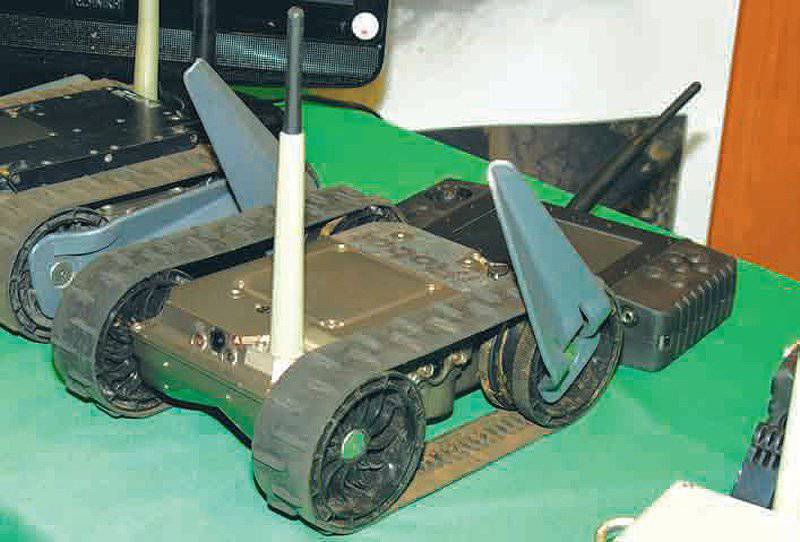
原始机器人非常耐用,由复合材料制成,并按照“安全”的概念设计,使其能够承受10仪表的跌落或飞行到65仪表后的触地,这使得机器人具有“最大跌落率”的能力。 它配备了一个前置的日/夜相机,具有±90°倾斜机制,可见光和近红外光谱区域的激光指示器以及200仪表上的麦克风和受保护的通信通道。 由于其对称的设计,它可以落在任何一侧,然后准备工作。 175x205x95 mm的大小允许士兵将虹膜放在口袋里。 机器人设计不同,前轴比后轴宽得多。 车轮由复合尼龙制成,每个车轮都有六个钉子,用于将把手悬挂在坚硬的地面上。
在开发的第二阶段,保留了大部分元素,包括架构。 然而,虽然Robot Iris保留了被遗弃的能力,但吊索的概念被拒绝了。 尺寸已改为229x203x94 mm,重量已增加到1,3 kg,但增加了一公斤的有用载重量。 车轮也经过改装。 这种配置中的几个Iris机器人被交付给使用它们进行测试和操作的客户,这使得Robo团队可以获得用于开发生产版本的宝贵数据,该版本于今年6月2014首次交付。 经过验证的概念的不对称结构被拒绝,有利于传统的矩形形状。 顶级平台上的皮卡汀尼指南可以接受通过RS232连接器,视频/音频连接器或以太网连接的设备,当然,在安装它们之后,毫无疑问会抛出机器人。 Robot Iris配备了全新的车轮,它保留了爬楼梯的能力,据Robo团队称,与第一款车型相比,它的功能有所提升。 它可以克服高度为64 mm和45°斜率(运输方面为100%)的障碍物,最大速度为4,8 km / h。 数据传输系统具有自愈能力,扩展了机器人的范围,特别是在城市地区。 Iris由Rocu-5模块控制,该模块与机器人一起开发,提供可在阳光下读取的电阻式触摸屏,与5英寸夜视眼镜兼容,而不是之前的4,3英寸触摸屏。 剩下一个手指操纵杆,按钮数量增加到六个,屏幕两侧各三个。 内存量显着增加,增加了GPS,加速度计和数字罗盘,以及5 MB上的前后摄像头。 连续操作时间从3到6小时,但更重要的是,质量从700减少到540克。


Robo团队最新的Iris采用完全对称设计,配备Picatinny导轨,可安装重达1千克的设备


Robo团队的Iris机器人配备了一个通信通道,可以让您创建一个自我修复的网络,这使您可以在城市工作时增加这些系统的范围
在Mistral集团收购ODF Optronics之后,后者目前正在推广EyeDrive机器人
米斯特拉尔安全: 9月,2013,Mistral集团收购了以色列公司ODF Optronics并事实上进入了地面机器人制造商的社区。 EyeDrive是ODF创建的第一个可抛式传感器的补充; 通过在现有车轮上添加橡胶履带,4x4配置可以快速转换为履带,并且尺寸略微增加到350x320x165 mm。
EyeDrive的重量为3,76 kg,0,08套件或0,19套件上的彩色相机的每一侧都安装了黑白两色。 带有激光指示器的附加摄像头可以安装在右前方。 它可以左右转48°,安装轨道时右侧的能见度略有降低。 能够从五米外捕获声音的麦克风也是触摸套件的一部分。 一个1千克的通信模块,通过USB连接到硬化的笔记本电脑,提供与EyeDrive机器人的通信通道。 规定的行动半径为开放空间的400米和建筑物内的70米; 机器人控制信号通过915 MHz频道发送,而视频图像以2,4 GHz频率发送。 锂离子电池的平均寿命为2小时(时间因使用的传感器而异),最大有效载荷容量为3,5 kg。 作为一项规则,以色列公司对其外国客户保持沉默,但很明显,EyeDrive机器人正在服务于以色列军队。

添加手柄可以轻松地投掷EyeDrive,或者在这种情况下,将其转移到狗身上



英国公司Robosynthesis开发了一种完全模块化的概念。 顶部照片显示了Robocube组件,该公司的大多数机器人都是基于该组件的。
Robosynthesis: 对地面机器人进行分类是一项艰巨的任务。 随着机器人合成,这变得更加困难,因为英国公司已经开发出一种完全模块化的概念,允许它重新配置其机器人的尺寸,配置和作用。 即插即用(自动识别和连接设备配置的原理)是机器人合成系统中的关键字。 这些名为Robocube的模块是系统的关键元素,因为它们不仅可以执行特定任务,还可以拥有自己的计算能力。 由于获得专利的通用连接器带有由非金属材料制成的旋转锁,可确保模块的可靠机械连接,电源元件的连接以及高通量的通信通道。 不同的模块,无论是旅行模块,传感器模块,电源模块,计算模块,激光雷达,通信模块,工具模块,由于通用连接器,它们都以Lego设计师的风格组装成单个机器人。 相同的系统用于安装第三方设备。 目前,通用连接器已得到改进,以提高相当于潜水到100仪表的防护等级(IP等级); 这将允许机器人合成机器人在潜在的爆炸性环境中工作。
正在对设计进行分析,以便进行修改,使连接器真正安全并经过ATEX认证(欧盟指令描述设备的要求和在潜在爆炸性环境中工作)。 至于机动性,开发了几种车轮模型,以便机器人可以在任何类型的地形中移动。 在优化机动性时,机器人合成从生物中汲取灵感:用于测试收集器和水线的半球形轮子取自节肢动物的节肢动物,以避免卡在石头或植被上,而“爪子”则模仿昆虫腿和用于在各种类型的地形中移动。 通常不与地面接触的驱动轨道使得将障碍物转向具有优势。
Robosynthesis的机器人使用了采用Formula 1的高科技材料和技术,例如金属化聚合物。 它们比标准材料制成的轻得多,这使得它们具有更大的承载能力或者使用相同的电池组具有更长的操作时间。
在Robosynthesis提供的小型机器人中,我们看到了Armourdillo。 这是一种便携式投掷式战术信息收集设备,可以在几分钟内使用Robocube引擎在没有工具的情况下组装在模块周围。 机器人提供了360°的概述,其通信系统可以形成网状网络,通过使用多个Armourdillo机器人来增加射程并增加功能灵活性。 机器人非常耐用,从可拆卸的后杠杆开始。 该杠杆还用于通过障碍物增加稳定性和通畅性。 驱动履带还可以帮助克服障碍物,并且轮子在越野地形中“抓住”。 四个通用连接器由可拆卸盖保护,两个在上侧,一个在前面,一个在后面; 它们允许您使用总重量高达两公斤的各种设备,但是您不能扔机器人。
Robosynthesis公司的另一个产品,可以归结为“轻型”类别的是Roboforce 1,在配置4x4中它的重量是2,9; 顶部的两个连接器允许您接受两个不同的设备(最大重量2,5 kg)。 一个连接器可用于安装第二个电源模块,其使用时间翻倍,持续一个半小时到三个小时。 机器人的防护等级为IP 67,也就是说,它可以浸入一米; 它配备了超级OFDM通信信道(正交频分复用),可在开放区域内提供最大带宽和1000仪表范围,在城市建筑中提供大约100仪表,具有间接可见性。 Roboforce 1有一个前置摄像头,但也可以安装各种类型的传感器,包括日间摄像头或热成像仪。 机器人可以以4,8或10 km / h的速度移动。
目前正在开发的Armourdillo和Roboforce 1机器人只有两种可以使用机器人合成技术“组装”的地面机器人模型。 在正在开发的几个项目中,还有一个两栖平台。
PIAP: 这家波兰公司开发了一种战术废弃机器人Taktyczny Robot Miotany(TRM)。 电动机和电子设备(包括摄像头,LED头灯和麦克风)位于圆柱体内。 后部稳定尾部,末端加重,确保正常运动。 1,4单位的重量为kg,可以在15-20米处投掷,并且当从9米的高度落下时它可以存活。 尺寸TRM 210x167x190 mm,可以达到超过3 km / h的速度,连续运行的持续时间为1小时。 他的控制站允许您同时使用三个机器人,集装箱装有三个TRM机器人和一个控制站。 根据一些消息来源,Piap正在进一步开发其TRM,很快就会出现这种机器人的新版本。
MacroUSA: 不仅军队需要机器人。 每年,美国海军和海军陆战队开展数千次所谓的海上拦截行动(MIO)海上拦截行动,由VBSS团体参与(侦查和拘留从事海上非法活动的船只),这些行动经常在敌对环境中进行搜索行动。 因此,在2011中,空间和海军系统中心对客户的几个小型废弃机器人和传感器进行了评估,以确认要求并为MIO机器人开发基本操作参数。 MacroUSA随后收到了两个实验系统的设计和开发合同,每个实验系统包括一个带显示器的控制单元和两个小型浮动机器人Stingray。 开发中心要求一个质量约为1,5 kg的机器人,它可以放入Molle标准的口袋中(模块化轻型载重设备 - 一种轻型模块化系统,用于携带设备)。 关于机动性,它必须克服甲板上的常见障碍,例如绳索,电缆,高度从37,7到50 mm的锚链,而不是卡在甲板光栅中。 通常船舶的甲板上覆盖着油和泥,因此机器人需要足够的抓地力才能在这些情况下保持原位,并且当海洋在红海和印度洋上常见的传统单桅帆船帆船上的5点粗糙时保持稳定。 机器人必须能够承受从5米到钢板上的防坠落并且防水深度达到1米,同时不仅必须漂浮在水面上,还要漂浮在水面上,为此目的,浮动装置连接在其上。
此外,还要求具有全天候操作和双向音频系统的光电传感器。 一个遥控的控制装置能够吸引对手的注意力或在完全黑暗中使他们失明,这也在名单上。 伸缩式桅杆和绳索的附加点被添加到其中,加上一个用于两个机器人的控制单元,一个由操作员控制,另一个用作运动传感器,为整个VBSS组提供后部。

来自MacroUSA的Stingray是甲壳虫机器人的进一步发展,它是专门为满足海上拦截作战机器人中空间和海军海军系统指挥部的需要而创建的。

最新版本的Beetle 1,8 kg质量可以承受从3米高度到混凝土的跌落,并具有700克的有用载荷能力
多年来,在MacroUSA目录中,已经安装了甲壳虫机器人,其尺寸和重量都很合适,但不能满足许多其他要求。 其中一个要求是强度增加,甲壳虫的铝成分不够强。 成本和加工问题“起到”不支持使用钛,但有利于单片碳纤维底盘,侧板由飞机铝制成,车轮和内部支架由碳纤维制成,闭孔泡沫用于浮力,使质量保持在1,8之内公斤。 高度取决于克服障碍物的能力(克服50中的绳索mm需要几乎加倍直径的车轮),宽度由电池组决定; 密封底盘所需的浮力长度由设计师决定。 因此,Stingray的尺寸为253,9x205,5x95,5 mm,几乎是4500 cm3体积 - 该限制值由客户设定。 很快,MacroUSA就放弃了主动浮力支撑系统,并提供了一个高可见度的浮力支撑装置,它可以将自己包裹在Stingray周围,在水中工作,并允许机器人保持离地间隙。
水中的流动性或湿润或油性金属表面的抓地力导致车轮配置的妥协。 最终的解决方案是在车轮上设置微型设备,并在侧面突出部分设置定向叶片。
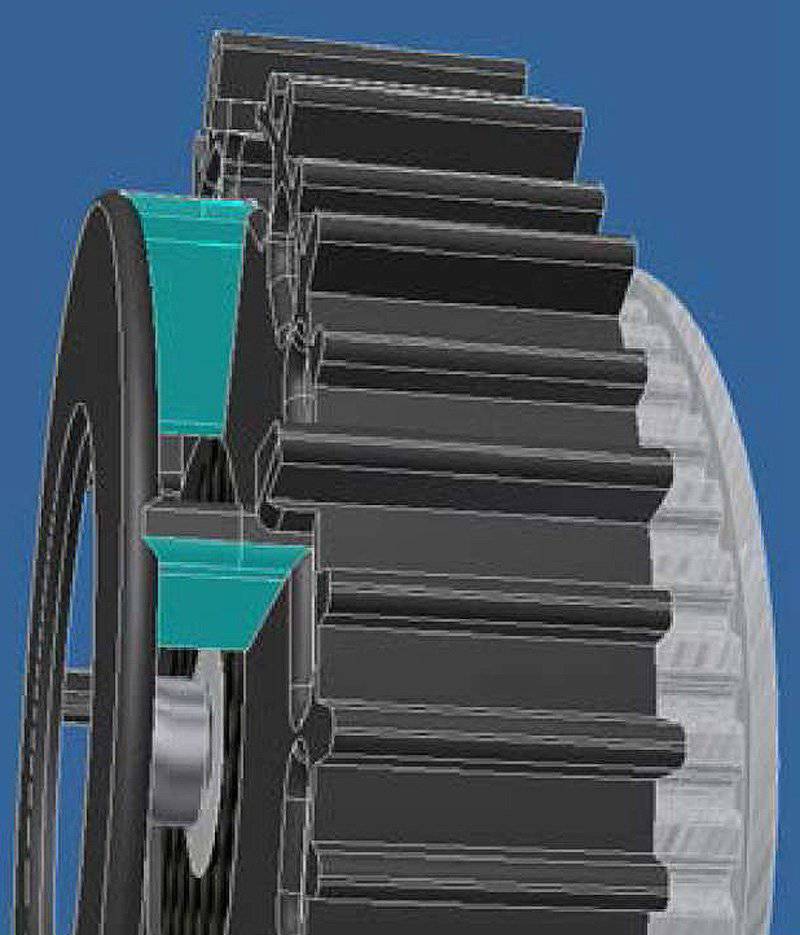
黄貂鱼机器人的轮子的特写镜头与侧面投影与定向刀片(绿松石)
两个轴之间的中间带有助于克服障碍物。 Stingray机器人配备了具有50°视场的日夜两用摄像机,其倾角为±85°; 当机器人翻转时,视频和控制信号会自动反转。 前面有Stingray LED白光和红外光谱。 在Picatinny导轨上,您可以安装通过RS700连接器连接到机器人的附加设备(最大232克)。 在这种情况下,不再推荐扔机器人是很自然的。 电池提供超过两小时的工作时间。 存在两个数据传输信道:利用编码信号的正交频分的压缩提供视频通信,而机器人通过具有频率跳跃的宽带信号的信道来控制。 视线内的动作半径为200米,在其他情况下为50米。 如前所述,Stingray是以前型号Beetle的开发,它仍然存在于MacroUSA的目录中,适用于不需要机器人海上应用的客户。
由于军方越来越多地参与反海盗行动,该公司目前正在等待海军太空和海军系统指挥合同的签发(已经发布了200系统报价请求)。
在轻型机器人类别的顶行,MacroUSA开发了Armadillo,它有几个版本。 质量为3.5 kg和4.0 kg的Armadillo V3,13和V3,70版本的机器人分别保留在抛出的类别中,因为它们都能够承受从2,5仪表的高度或水平飞行8米的跌落。 它们可以在投掷后立即开始工作,因为它们具有完全对称的设计,当然在这种情况下不建议安装任何其他设备。 两个版本都配备了Picatinny板条和RS-232 / 485连接器,用于安装或连接传感器或执行器,如爆炸物处理设备,机械手或旋转非制冷红外热像仪,总重量可达3千克。 这两个选项在360°上都有一个圆形视野,由白天/夜晚的彩色摄像机提供,数字变焦x2安装在所有侧面。 前置摄像头可以在V4.0版本上倾斜。 剩下的差异很小:V3.5版本有两个摄像头,前后红外LED灯,而V4.0有一个前置摄像头和可见光和红外光谱的LED灯,指向四个侧面。 两个机器人都配备了麦克风和可选的GPS系统,以及数字加速度计。 MacroUSA使用COFDM数据通道(编码信号的正交频分复用),在1,2-1,4或2,2-2,4 GHz频段上运行(许多其他频段可作为军事用户选择),具有300视距范围和间接可见度200米。 使用直径为130-mm的橡胶轮,Armadillo机器人可以克服45°斜坡。 它们可以安装套件以克服步骤,包括脚蹼和橡胶履带而不是轮子。 下一版本的V4.5旨在提供更高的速度和更高的有效载荷。 它有更多的连接器用于连接各种设备,专门用于处理爆炸物。 他在任何政变中占据首发位置,并且能够克服这些步骤。

MacroUSA的机器人犰狳设计有不同的版本,可以从高度2,5仪表下降。 机器人被他们自己的机器人的其他制造商用作基础组件。
由于许多美国项目已经关闭,MacroUSA现在依靠出口和非军事用途。 该公司对欧洲,法国和波兰以及远东的一些采购项目表现出越来越浓厚的兴趣。
Armadillo V3.5已成为Oto Melara的TRP3机器人的参考点。 基本机器人经过彻底的改造,例如,在意大利公司,原装电动机被无刷电机取代。 数据传输通道也得到了改进,便携式控制单元经过修改以满足意大利军队的需求。 另一方面,安装在Freccia 8x8机器上的固定控制单元由Oto Melara从头开始创建。 新的控制单元基于一台硬件计算机,显示13英寸,通过集成数据通道连接到通信中心。 从一开始,该部门就是为了控制公司开发的其他地面机器人而设立的,作为意大利军队Forza NEC数字化计划的一部分。 当从手持设备操作时,TRP-3 NEC机器人(众所周知)通过士兵的个人可编程无线电台进入Forza NEC网络。 当控制机器人时,激活机载可编程无线电台以进行机器人的操作。 根据Oto Melara的说法,开放区域的控制通道范围是450米,城市区域是200米。 该机器人获得了意大利国防部的资格,第一批六个机器人被提供给意大利军队。

Oto Melara的TRP3机器人被意大利军队采用,作为Forza NEC数字化计划的一部分。
TRP-3 NEC机器人将成为装备有BMP的Freccia版本的中型步兵团的“完美眼睛”。 TRP-3 NEC比原始V3.5稍轻,但其尺寸基本相同。 最高速度为1,8 km / h; 机器人有六个摄像头:前面是一天颜色和一个夜间摄像头,后面和侧面是日间摄像头,第六个安装在机器人顶部,用于在可疑车辆下进行检查。 皮卡汀尼指南是应客户的要求集成的,以便安装激光测距仪,该测距仪具有集成的GPS和数字罗盘,允许TRP-3 NEC接收潜在目标的坐标。 该界面允许您接受其他类型的设备。
iRobot公司: 在该公司的军事任务产品中,最小的是110 FirstLook机器人。 履带式,下降式,自动调平平台可承受高度近5米的混凝土坠落。 没有车载设备,质量为2,4 kg,110 FirstLook机器人的速度为5,5 km / h,其橡胶履带保证了大多数表面的良好渗透性。 该设备可以承受1米的浸入,配备两个用于克服障碍物和台阶的鳍状肢。 最初,鳍状肢是平坦的,但在高温下,美国陆军和海军陆战队在伊拉克和阿富汗相遇,它们往往会变形,因此被更强大的3D鳍状肢取代。 控制单元类似于游戏控制台,以使年轻士兵直观。 加固防水子弹的屏幕为5英寸,分辨率为800x480,质量为0,9 kg。 4 GHz频率的数据链路(4,9 GHz的解决方案也可用)提供了200仪表的视距范围。 对于其他条件,iRobot专门开发了无线电设备,允许您在机器人之间安装多节点网络。 最初开发用于安装在机器人上,现在这个设备已被修改为下拉选项。
110 FirstLook的标准套件包括四个可见光/红外光谱相机(因此,所有侧面都有红外照明),具有x8数字放大倍率。 但是,可以在可选的Picatinny导轨和辅助连接器上安装其他设备进行侦察任务。 该公司开发了自己的Idac智能套件(集成部署和相机 - 集成部署和相机),400克,桅杆上的摄像头,270°视角,高度为155 mm。
FirstLook机器人还支持各种智能传感器。 武器 大规模杀伤,例如来自Smiths Detections的LCD 3.3,来自RAE Systems的MultiRAE和来自堪培拉的Radiac。 110 FirstLook机器人不属于国际军火贸易规则,它服务于美国陆军和海军陆战队,并正在扩大其外国客户的基础。

重量为2,4 kg,FirstLook可以抛出很远的距离,它的动能足以打破窗户并最终进入内部
奎奈蒂克公司: 来自Qinetiq North America的Dragon Runner 10位于迷你机器人的上边界,用于质量; 它是Dragon Runner(DR)家族中最小的成员。 底盘可以是轮式或履带式; 将一种配置更改为另一种配置是一种简单而快速的操作,无需特殊工具即可执行,轮子更换为驱动链轮,反之亦然。 最大速度为6,4 km / h,因为电动机的数量不会破碎,这也可以克服高达100%(45°)的斜率。 来自地面的纤薄机身采用50 mm,这是在恶劣地形中工作的必备功能。 如果没有安装任何设备,DR10是完全对称的,可以在投掷后立即开始工作。
操作员可以通过前后昼/夜摄像机控制机器人,声音传输板载麦克风。 DR10可与所有QinetiQ管理控制台一起使用。 由于内置数字罗盘和GPS,操作员不仅可以看到摄像机的图像,还可以看到机器人的运动方向和位置。 直接可见度的视线超过650米。 根据任务和车载设备,工作时间从两到三小时不等。 DR10服务于美国军方和外国客户,包括英国。


作为Dragon Runner系列中最轻的成员,Qinetiq DR10机器人可以同时具有轮式和履带式配置,并且在没有其他设备的情况下完全对称,并且可以通过投掷来部署

iRobot新推出的FistLook配置有新的3D脚蹼,具有很高的强度,特别是在高温下工作时。
信息