如何保存核潜艇?

4月7日,1970在地中海完成兵役并进入大西洋,8A项目的苏联潜艇K-627前往其北部基地。 突然,在其第三个隔间中,化学再生筒被点燃,旨在清洁船的大气层。 火灾需要花费相当多的时间才能升级为全面火力。 应该是,反应堆的紧急保护工作,涡轮机停止。 备用柴油发电机无法启动,潜艇没有电,这使生存能力的斗争复杂化,但仍然持续了三天多。 在炸毁压载舱后,船浮在水面上。 与此同时,大火通过船只蔓延开来。 外侧压盖在两个船尾舱室中烧毁(从船体固体船体上拆下的电缆密封)。 水开始流入隔间,导致负向修剪增加(向船尾倾斜)。 两天后,高压空气供应干涸,没有什么可以抑制水流进隔间。 这艘船注定要失败,有必要拯救船员。 接近的水面舰艇拆除了部分水手。 该中心继续收到明确的命令 - 直到最后一次拯救船只的斗争。 在四月12的早晨,增加修剪的过程是雪崩般的,船只几乎直立的位置,迅速走到底部,带走了52水手的生命。
在这场悲剧发生多年后的16年之后,另一名苏联APL再次在大西洋海域遇险。 现在是K-219,一艘携带16弹道导弹的战略潜艇,在其矿井中装有核装药。 十月16当年的1986值班船,导弹舱发生火灾。 引起火灾的原因是火箭的破坏,随后侵犯了矿井的紧张程度并撞击了车厢内的推进剂部件。 此外,灾难的发展是根据已经熟悉的情况发生的:火蔓延到隔间,燃烧船外密封,水进入隔间,结果增加了修剪,导致船的纵向稳定性丧失。 在15小时顽固,但拯救船只的无效斗争之后,其发生了迅速的洪水。 这一次,他们考虑到了K-8的悲惨经历,大部分船员都及时运到了接近的船上。 在船上只有9人由船长领导。 其中五人设法逃脱,四艘潜艇一起停留在海底,深度约为5000米。
K-278“Komsomol会员”
不到三年之后,苏联海军对新的悲剧 - 共青团潜艇的死亡感到震惊。 根据鲁宾中央设计局(代码“Fin”)开发的685项目建造的这艘独特的船,在1985建立战斗潜艇世界纪录深度(1027 m)后进入吉尼斯世界纪录。 7今年4月1989在11时段,当潜艇深度为400 m,从第五次自主航行返回时,其严厉的7舱发生火灾。 在仅仅11分钟之后,完成紧急上升的船就在挪威风雨海面上。 一场绝望的斗争开始拯救这艘船。 同样,如已经描述的情况那样,水流入进料室导致负的修剪。
关于沮丧和降落
这里有必要解释为什么这个过程对潜艇如此危险。 任何置换容器最重要的特征之一是稳定性,被认为是容器的能力,由平衡位置的外部影响推断出,在这种影响终止后返回到它。 存在横向和纵向稳定性,即分别在滚动或修剪发生后恢复平衡的能力。 潜艇的主轴形船体长度大于宽度,对修剪特别敏感 - 在纵向上与水平位置的偏差。 当船在运动时,由于某种原因而产生的差异由其水平流体动力舵的作用抵消。 但是在船上,没有航向,水动力控制面当然不起作用。 您只能通过相对于重心移动船内的重量载荷来对抗修剪,从倾斜发生的一侧减少它们,或者从背面增加它们以使船平整。 实际上,这个程序包括清除一个并用水填充位于船首,船尾和沿潜艇侧面的其他压载舱。 当然,从重心的重量增加的任何一侧,这导致船的吃水增加 - 第三(连同滚动和修剪)参数决定了船在海中的着陆。 登陆,在平静的水中有一艘可用的船,称为平衡。 同时,完全没有滚动和纵倾,并且吃水是使船在建设性(计算)水线中浸没在水中。 当潜艇在暴风雨的海面上时,波浪摆动它,不断改变决定着陆的所有三个参数。 如果潜艇处于正常(完整)状态并具有必要的稳定性,则其振荡相对于平衡位置发生并且不会构成危险,当然,除非它们超过临界值。 由于事故和由此造成的损坏,潜艇在地面位置具有平衡以外的平台,即,即使在没有海水搅动的情况下,船的后跟和纵倾的角度也不为零,并且其吃水不在建设性水线上,因此情况完全不同。 在争取应急潜艇生存能力的过程中,必须不断考虑这种情况。 通过使用吹塑压载舱的方法(特别是位于船头或船尾)中使用紧急隔间淹没,平整滚动或纵倾来对抗火灾,应该了解这些措施如何影响纵倾的变化。 这并不容易,因为主观感知可能会失败,并且没有地方可以获得关于船的真实空间位置的客观信息。
在共青团灾难的情况下,实际上整个拯救核潜艇的斗争发生在地面上并持续了将近六个小时。 火势蔓延到三个饲料室,被设法驯服。 但是在对抗火灾的过程中,出现了一些错误,导致负面调整逐渐但稳定地增加。 在潜艇死亡不到一小时之前,它的饲料沉入水中,因此足够高的饲料稳定剂在水下消失。 到这个时候,船的纵向稳定性的价值仍然很小,以至于修剪的进一步快速增长和紧密的悲剧结果是显而易见的。 从Severomorsk抵达的救援飞机拍摄的照片证实了这一点。 在17:08中,船尾处的修剪船在80°(即几乎垂直)处于水下。 在上层甲板上的船员在冰冷的水中。 在69水手中,27幸免于难。
因此,由于失去纵向稳定性和瞬间洪水,从火灾开始的所有三次灾难都以潜艇的破坏而告终。 政府委员会致力于确定共青团死亡原因的文件中指出了这一点。 委员会委托造船部的一家企业开发了一套硬件,旨在客观地监测潜艇在紧急情况下着陆的参数。 计划将开发成果用于下一代潜艇的项目。
元素数学
该职权范围准备了CDB之一,设计了潜艇。 开发工作(OCD)始于1993年。 很快就发现主要问题在于缺乏一种算法,可以在随机海浪的条件下确定船舶着陆的参数。 因此,正是从OCD开始的算法的搜索。 许多领先的造船和海军科学和设计组织的专家参与了其发展。 与他们一起,他们创建并测试了数学建模的方法和实验三种算法变体。 其中之一(塞瓦斯托波尔仪器制造研究所的教授算法,Yu.I。Nechaev)得到了船舶制造研究所的开发客户的认可,并被采用用于开发项目。
Nechaev算法是通过分析在自然波作用下使用各种类型的船舶的无线电控制模型进行的实验材料而开发的。 然后在黑海的一艘船上进行了测试 舰队 和运输车队的船上
根据该算法开发的操作原理KPORP基于对着陆船的三个参数的当前值的连续监测:跟部和纵倾的角度,以及吃水。 在海上兴奋的情况下,紧急船舶的所有这些参数是随机的。 累积一定时间,每个参数的数据随时间平均,然后所得结果补充根据所采用的算法计算的校正。

敏感管
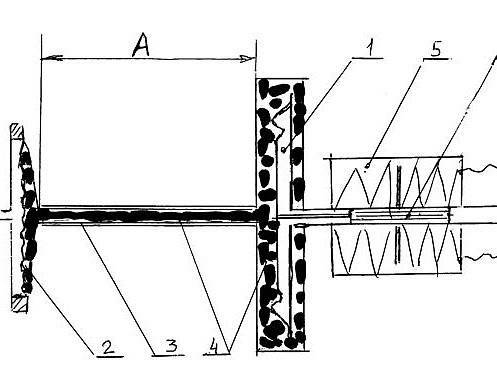
所采用的KPORP算法的实现是使用一组当前值的跟,修剪和拔模的传感器来执行的。 为了测量滚动和纵倾的角度,开发了两个彼此最大程度标准化的传感器,其中一个(测斜仪)位于中间框架(潜艇船体的平均横截面)和第二个(修剪计)位于船的中心平面。 传感器的原理基于在高灵敏度膜盒的内腔中发生的压力或真空的控制,这是由于连接到该腔的管的倾斜,其填充有一定密度的特殊非冷冻液体。 当在船的滚动(纵倾)处,管的末端在膜盒上方时,在箱的空腔中发生一些过压,其与管的长度乘以倾斜角的正弦和填充管的流体的比重成比例。 当沿相反方向倾斜时,管的端部相对于膜盒降低,这导致其中的真空与相同的值成比例。 为了密封填充有液体的空腔,以及补偿液体的热膨胀,安装在与膜盒相对的管的端部上的几乎为零刚度的弹性隔膜起作用。 它还用于补偿隔室中气压的波动,同样影响隔膜箱的外部和弹性隔膜。 当在膜盒的空腔中发生压力或真空时(由于倾斜),它弹性地弯曲,并且其中心移动到电换能器的芯的一侧或另一侧,在其输出处产生相应极性的信号。 滚动和微调传感器仅相差一个基本尺寸 - 充满液体的管的长度,其与监测角度的极限值的正弦成反比。 由于修剪角度的极限值明显小于跟部,为了在两个传感器的输出处获得相同的信号,修整传感器管必须更长。
通过一对压降传感器进行牵伸测量,其动态腔与潜艇航向下的舷外空间和与大气的静态空腔连接。 它们使用两个相同的差压传感器,这些传感器具有不同的测量极限,放置在同一平面和同一垂直方向,但位于不同的水平。 根据当前吃水的实际值,读数取自其中一个传感器(上部或下部),以达到所需的测量精度。 当将流体静压力转换为与船体相关的坐标系中的吃水深度时,考虑后跟和纵倾角的当前值。
该组装置还包括上述传感器的次级换能器块和计算信息单元(WBI),其是小型计算机。 输出数据被发送到WBI,WBI实现输入其存储器的算法,并且还提供对测量参数值的修正的引入。
KORPP模型是在部门间委员会的监督下制造和通过的一个多阶段测试周期,包括对各种机械和气候影响的抗性测试,以及多维轧机机架的测试。 同时,KPORP的可维护性通过两种类型的俯仰的单独和同时效果进行测试,其中滚动和纵倾角的设置模拟了船的紧急位置。 测试结果证实了TORC完全符合TOR的要求,无论是在确定平衡着陆参数的准确性方面还是在对所有类型的船载效应的抵抗方面。
压力游戏
原始技术解决方案的复杂性有助于保持对水下船舶着陆的持续自动控制。 传感器系统响应流体和空气压力的变化。
信息