自动货运车辆便于战场上的士兵劳动
“驴子的日子”。 来自位于现今巴基斯坦境内基地的30-s中间的印度服务队的包运输公司的骡子

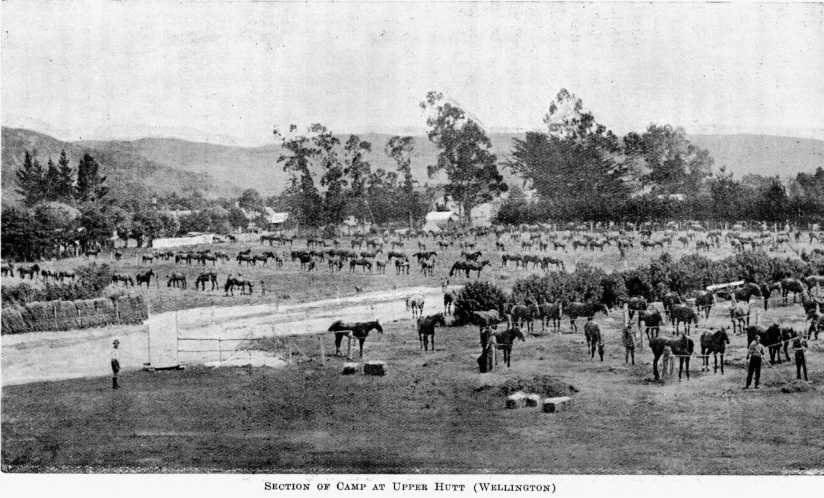
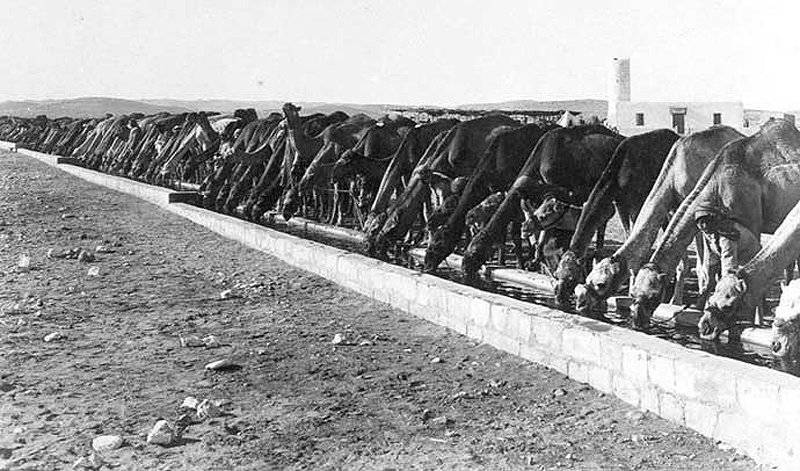
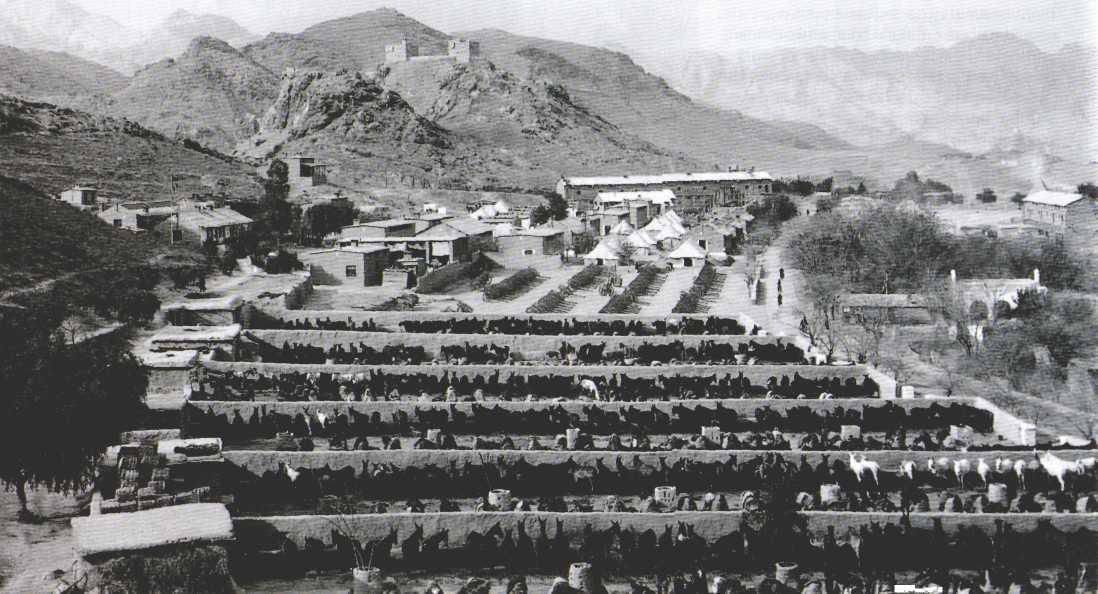
几个世纪以来,各种物种和亚种的包装动物已被用于军事行动。 正如我们在档案照片中看到的那样 - 这是马,骡子和骆驼。
今天,马拉运输主要是叛乱分子的需求,他们准备好缓慢的动物运动,不可预测性和大量的材料和人力资源,以换取低成本和难以置信的环境条件适应性。
对于世界领先的武装部队而言,从60-s开始,战斗区域必须有载人直升机和全地形车供应。 尽管它们具有超过其他运输方式的速度和有效载荷优势,但它们并不总是适用于作战行动的后勤,成本,可用性,地形,脆弱性或琐碎的谨慎影响。 相反,由于需要减少作战负荷的负面影响,自动供应系统变得更加智能化。
在一个现代化的不对称战场上,叛乱分子仍然愿意使用历史悠久的非机械化,非人道的后勤手段,如包裹大篷车,同时认识到他们的不可预测性以及他们承担着巨大的后勤负担。 另一方面,似乎世界上领先的军队最不愿意回归时间,宁愿探索无生命的解决方案,具有讽刺意味的是,人们可以找到价值数百万美元的哺乳动物的机械类似物。
这种无生命供应系统很可能只是被遗弃一次,将它们视为仅适合家庭使用的“复杂而有趣”的技术。 然而,近几十年来,机器人技术的使用在国防领域逐渐扩大,目前无人机械系统被认为是减少人力资源需求和拯救生命在材料和技术供应领域(以及任何其他领域)的潜在工具。
最初,这些系统对命令级别感兴趣,主要是出于保护其力量和节省人力资源的原因。 然而,目前在用户层面也表现出越来越大的兴趣,在那里已经获得了大量的战斗装备的直接负面影响的经验,这些战斗装备是一名士兵必须在剧院上穿的,例如在阿富汗。 如果战场上士兵的能力不应因过度的可穿戴重量而恶化,那么显然迫切需要某种形式的机械援助。
地面自动系统至少可以挽救生命并在争议地区提供供应路线。 他们提供的额外“肌肉力量”也可以加强步兵部队的计划火力和战斗稳定性。 它们可以添加到带有动力驱动装置的无人供气系统中,最有可能是无人直升机。 例如,这是一个海军陆战队的设计,用于有希望的货物无人机(Cargo UAS)或在美国陆军的NLOS-T(非视线传输)导弹等垂直发射集装箱中的导弹,它提供了可能不同的方式通过使用“第三维度”绕过伏击和定向地雷。
由于人力资源和边境安全需求不断短缺,以色列军队是率先采用Guardium自动地面车辆(ANA)形式的无人巡逻平台之一。 它由埃尔比特与以色列航空航天工业公司(IAI)的合资企业G-NIUS开发。 为Guardium提供的任务范围包括巡逻,路线验证,车队安全,侦察和监视以及战斗行动的直接支持。 在其基本配置中,该车基于TomCar 4x4 SUV,2,95 m长,2,2 m高,1,8 m宽和300 kg承载能力。 半自动模式下的最大速度为50 km / h。
在9月2009上,G-NIUS公司展示了Guardium-LS,这是一种针对物流进行了优化的扩展版本。 它基于TM57底盘,类似于英国军队采用的机器,作为提供Springer公司级别的主要可居住平台。 Guardium-LS的长度为3,42 m,其承载能力增加至1,2吨(包括牵引货物)。 它可以在控制或自动模式下运行,它与巡逻版的前代系统具有相同的系统,包括Elbitra / Elisra EJAB弹头消声器; 光电子站IAI Tamam Mini-POP,由热成像仪,日间CCD相机和人眼安全激光测距仪组成; GPS导航系统; 激光回声测深仪(LIDAR)避开障碍物; 和立体摄像机。 他还拥有“追击”传感器,可以让他自动遵循车队中某人或其他车辆的指示。


IAI的“现场搬运工”雷克斯设计用于携带200公斤的设备,可以在不加油的情况下运行三天。
直接支持敌对行动
G-NIUS家族作战作战后勤的另一个潜在助手是AvantGuard,目前也在为以色列军队服役。 它采用Guardium控制技术,但该平台是对加拿大履带式Wolverine履带式车辆的改进。 它更小,并带有名称Dumur TAGS(战术浮动地面支持平台)。 这款四轮车采用四缸Kubota V3800DI-T柴油发动机,额定功率为100 hp,最高时速可达19 km / h,可以半自动模式运行,也可以通过可穿戴控制面板进行控制。 它的重量是1746千克,有效载荷能力为1088千克,它可以用来疏散伤员和其他后勤任务。
2009 年 3 月,IAI 的 Lahav 分部展示了 ANA 中的一个新模型是“现场搬运工”Rex。 它基于一个小型机器人平台,可以在自动模式下陪伴 10 到 200 名士兵,能够在不加油的情况下携带 XNUMX 公斤的设备和物资长达三天。 据该公司称,“机器人车辆以预定距离跟随领头士兵,同时使用 IAI 开发并获得专利的技术。 使用简单的命令,包括“停止”、“驾驶”和“跟随”,士兵控制 机器人 不会从他们的主要任务中分心。 以这种方式控制机器人可以实现直观的交互,并在短时间内将产品快速集成到现场。” Rex 尺寸为 50x80x200 厘米,最高时速为 12 公里/小时,转弯半径为 1 米,最大爬坡能力为 30 度。
与美国家族波士顿动力公司开发的四足设备中可以看到与犬科的类比,但实际上完全不同。 该项目由美国国防部高级研究与发展办公室(DARPA)资助,海军陆战队和陆军参与。 Big-Dog是一个重约109 kg,高度1 m,长度1,1 m和宽度0,3 m的机器人。它的原型在Fort Benning作为徒步巡逻的辅助设备进行评估,携带带有底板和三脚架的81-mm迫击炮。 对于所有类型的地形,该原型的典型载荷是50 kg(在60度的斜率上下),但在平坦表面上显示最大154 kg。
运动模式BigDog包括以0,2 m / s的速度爬行,高速5,6 km / h,小跑7 km / h或“跳跃步态”,在实验室中允许超过11 km / h。 主推进推拉式水冷却功率为15 hp,它驱动一个油泵,从而为每个支腿驱动四个执行器。 BigDog有大约20传感器,包括用于测量姿态和加速度的惯性传感器,以及用于测量腿部执行器的运动和力的关节传感器; 所有传感器均由车载计算机监控。
计算机还处理从远程操作员接收的IP无线电信号。 他给BigDog提供了必要的指示和速度加上停止/开始命令,蹲伏,走路,走得快,跑得慢。 喷气推进实验室开发的立体视频系统包括两台立体摄像机,一台计算机和一台软件。 它通常直接确定机器人前方的表面形状,并识别清晰的路径。 另外在设备BigDog中安装了LIDAR以自动按照人的指示。


Guardium-LS是ANA G-NIUS Guardium的可选有人居住版本,具有通用控制,可视化和电子抑制系统。 一个迷你POP光电站安装在机舱顶部,后面是一个EJAB爆炸消音器的多元件圆形天线

BigDog四足机器人在本宁堡步兵中心作为巡逻队的载体显示,自动跟随指定的团体成员


来自Boston Dynamics / DARPA的四足BigDog机器人克服了积雪覆盖的斜坡
越野步行
在早期阶段,BigDog证明他可以在10小时内在崎岖地形上行走2,5 km,但波士顿动力公司目前正在努力扩大设计约束,以便机器人能够克服更加困难的地形,具有侧翻稳定性,减少噪声特征和操作员依赖性较小。 目前宣布的LS3计划(Legged Squad Support System)的目标是在DARPA的监督下,由BigDog赞助,能够在400小时内携带181磅(24 kg)。
[媒体=http://www.youtube.com/watch?v=OuGZjsKQxbI]
为海军陆战队指挥官和DARPA主任携带LS3货物的自动步行系统示范
由John Deere与iRobot合作开发的或多或少传统的R-Gator采购机器可以在手动或自动模式下运行。 该车配备了三缸柴油发动机和25马力,六轮R-Gator配备了20升燃油箱,足以克服500公里。 变速箱无级变速,单位在手动模式下最大速度为56 km / h,在远程或自动模式下最大速度为0-8 km / h。
该机器的尺寸为3,08x1,65x2,13 m,自重861 kg,货舱0,4м3和有效载荷453 kg(拖车680 kg)。 R-Gator的标准视频系统包括固定的前后(用于驱动)彩色摄像机,具有92,5度视野和稳定的全景视图,放大倍率(25x光学/ 12x数字)摄像机水平旋转440度和垂直240度,具有自动对焦和灵敏度0.2 Lux F 2.0。 此相机可以替换为可选的日/夜光电/红外热像仪和变焦。
基本的R-Gator通信套件(具有900 MHz,2,4 GHz或4,9 GHz频率选项)具有最小300 m控制范围,它连接到基于Windows或便携式控制单元的操作员笔记本电脑。 NavCom Technology的机器人GPS定位系统可以与惯性系统结合使用,以提高精度。 它配备了一个LIDAR后传感器和两个LIDAR前视传感器,可以在远程和自动模式下检测距离为20米的障碍物。
值得记住的是封闭计划,该计划由洛克希德·马丁导弹和消防控制系统及其ANA MULE(多功能公用事业/物流和设备)执行。 它是全日空系统系统的“基石”之一,最初被认为是废除的军队计划FCS(未来战斗系统)的一部分。
据推测,该车将分为三种版本:突击灯ARV-AL(武装机器人车辆 - 突击灯),配备光学电子和红外传感器以及用于瞄准的激光测距仪/指针; MULE-CM(对抗 - 防雷)配备远程探雷系统GSTAM1DS(地面防雷探测系统),可以检测和中和反坦克地雷并标记清除通道,以及对简易爆炸装置(IED)和其他任务进行有限探测处理未爆弹药; 和MULE-T(运输),能够携带862 kg(否则为两个隔间)设备。 所有这三个选项必须具有通用动力机器人系统相同的自主导航系统,专为半自动导航和绕道障碍而设计。
MULE装置专门设计用于支持装甲部队并具有相应的前进速度(高速公路上的最高速度65 km / h)。 原则上,每个排应该有两个MULE,但后来他们修改了这个概念并在营级定义了集中控制。
ANA MULE的总吨位为2,26。 主框架由六个独立的弹簧式铰链轮支撑,其中安装了BAE Systems的电动机。 这种组合式柴油电动系统由Thielert柴油发动机提供动力,具有HP 135动力。
分支机
与此同时,洛克希德·马丁公司参与了其SMSS支持系统(Squad Mission Support System),该系统作为一个独立的研究项目提供资金,以满足有人和自动运输和物流模式的分支机构的迫切需求。响应。 该平台1,8x6拥有一吨6,沿着500 km和320 km在崎岖地形上行驶。 机器既可以由驾驶员控制,也可以由操作员远程控制(“受控自主”),也可以自动操作。 该机器声明的有效载荷超过454 kg,能够克服588 mm舞台和0,7 m宽的沟渠。满载时,高速公路上的巡航速度为160 km,越野80的巡航速度为XNUMX km。
其特征之一是存在由柴油发动机提供动力的充电器,该充电器可用于为该部门人员的个人无线电台的电池充电。 SMSS可以携带小型ANA,以及两个担架撤离伤员。 前绞盘和后部的连接点设计用于自动拉动。
SMSS Block 0原型在8月2009的Fort Benning陆军步兵中心进行了测试,之后该公司制造了Block 1的三个原型中的前两个。 它们具有UH-60L直升机悬架运输的连接点,改进的噪声特征控制和可靠性,以及升级的传感器组,以提高自治水平。 在2011中间,在阿富汗部署了两个SMSS系统用于现场测试,其运营优势得到了确认。
值得注意的是,在华盛顿的AUSA 2009,洛克希德马丁公司展示了SMSS的HULC(人类通用载重系统)携带系统。 除了各种任务之外,这个带有动力驱动装置的外骨骼被认为是SMSS的有用补充,作为在“最后一英里”卸载货物的一种方式:地形变得无法通行的地方。 HULC的体重为13,6 kg,可帮助主人承受重达91 kg的重量。
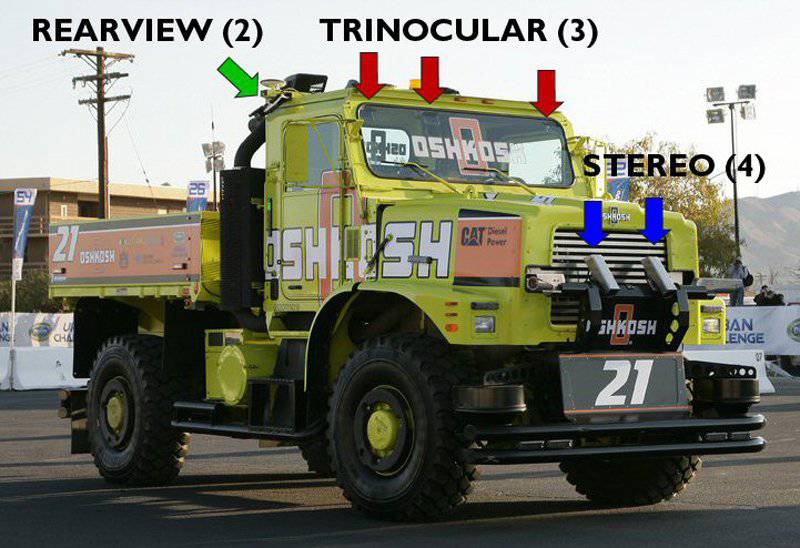
Oshkosh Defense采用了一种使用ANA技术的实用方法,用于DARPA资助的TerraMax项目。 它将远程控制和自主能力与标准的部队支援车辆相结合,预计将减少在现代作战区域执行日常支援列所需的人数。
在TerraMax团队中,Oshkosh负责设备集成,建模,电线管理,控制点跟踪和整体布局。 Teledyne Scientific公司为执行任务和路线规划以及高级车辆控制提供高效算法,而帕尔马大学正在开发一种多向车辆视觉系统(MDV-VS)。 Ibeo Automobile Sensor使用Ibeo的Alasca XT传感器开发专用LIDAR系统,Auburn大学集成了GPS / IMU软件包(全球导航和定位系统和惯性测量单元),并帮助设备的控制系统。
TerraMax是来自奥什科什的4x4军用MTVR卡车的变种,配备TAK-4独立悬架,6,9 m长,2,49 m宽,2 m高,重量11000 kg,有效载荷为5吨。 配备六缸四冲程涡轮增压Caterpillar C-121柴油发动机,11,9升容量和hp 425功率,最高时速可达105 km / h。 该设备的自主控制系统是作为一组设备开发的,包括带摄像头的视频系统; 激光雷达系统; GPS / IMU导航系统; 自动电子系统,多路复用奥什科什指挥区; 导航计算机总结传感器数据,地图数据管理,实时路线规划和高级控制; 以及CANBus控制的制动器,转向,发动机和变速箱。



洛克希德马丁SMSS在8月2009的Fort Benning训练营测试期间。 SMSS在那里执行卸下部门的功能。

洛克希德马丁电池供电的外骨骼允许佩戴者携带200磅(91 kg)到ANA难以接近的地方。 平面上的投掷速度为16 km / h

奥什科什MTVR TerraMax无人驾驶卡车在城市挑战测试期间通过了一个路口,然后是一辆护送车。 这种技术可以用于未来的战斗支援车队,拯救生命和节省人力。
车队指南
通过参加各种DARPA赞助的机器人车辆比赛,包括Urban Challenge,Oshkosh在2009开始时与美国陆军的TARDEC装甲研究中心签署了企业研发协议(CRADA),以使TerraMax技术适应运输柱的任务。 根据为期三年的CRADA协议,CAST仿制系统(Convoy主动安全技术)安装在TerraMax机器上。 它旨在充当车队的路线指示器,并将有关路线的信息传输到后面的自动车辆,同时它必须在人,动物和其他车辆之间安全运行。 随后,3月,2009,奥什科什公司宣布与地面系统研究中心合作 武器 海军正在评估TerraMax在各种作战任务场景中作为MTVR机器人卡车(R-MTVR)的使用。
最近,Vecna Robotics凭借其ANA Porter进入市场。 它被描述为个人货物运输系统和标准部队车辆之间的交叉,用于将重量从90移动到272 kg。 基本单元4x4的质量为90 kg,长度1,21 m,宽度0,76 m和高度0,71 m。
它可配置为以超过16 km / h的最大速度运输各种货物,最大里程为50 km,具体取决于地形,由锂聚合物电池供电。 电池由可选的太阳能充电装置或发电机在现场充电。 最大控制距离取决于视线(最大32 km)。
Porter目前以实验模型的形式存在,提供半自动控制套件,其特点是控制空间中的位置以平衡货物,加上“跟随我”和“车队”模式或自动控制套件,包括GPS导航,路线规划和地形图。 在其他任务中,可以在自主立柱中使用多个ANA Porters或执行联合周边监视。
海军陆战队货物无人机货物无人机系统计划是一个发现新一代无人机空中交付平台能力的例子。 海军陆战队调查实验室(MCWL)于4月份发布了年度2010的需求,以便在今年2月份的2011中展示能够在偏远地区运营的货物无人机。
MCWL实验室空战部件项目经理Amanda Mauri上尉说,货物无人机的要求主要取决于阿富汗的作战经验。 MCWL实验室与战斗发展中心和其他军团机构合作,确定阿富汗公司规模的单位在一天内可以处理的储量,并提出10000-20000磅的货物数量。 “至于距离,150里程是一次往返,它取决于从前方作战基地到前方基地的距离,但显然它们在不断变化,”她说。

Vecna Robotics的计算机生成的ANA Porter图像,现已通过原型阶段。
因此,MCWL声明的演示阶段的能力是将10000小时的20000磅货物(实际上是24磅)至少提供150海里的48小时。 整个货运套件中最小的元件应至少相当于标准木托盘(40x67x750英寸),至少1000磅,实际重量为10磅。 它应该能够独立地从直接视线外的前方基地或未铺砌的道路上起飞,并且还可以从其终端远程控制; 货物必须以至少XNUMX米的精度交付。
该平台的性能特点是能够以70英尺高度130节(15000 km / h)的速度满载飞行,并在高达12000英尺的高度悬停。 无人机还应与部署区域内的现有空中控制机构进行互动,其射频控制应与部署区域的频率要求兼容。
8月,MCNL实验室的2009宣布为货物无人机竞赛选择两个应用:洛克希德马丁/卡曼K-MAX系统和波音A160T蜂鸟系统。 诺斯罗普格鲁曼公司的MQ-8B火力侦察无人机被排除在外。
洛克希德·马丁和卡曼在三月2007组建了K-MAX团队; 她将洛克希德马丁无人机控制系统集成到商业上成功的中型K-MAX直升机中,该直升机广泛分布在建筑和木工行业。


以色列航空公司的AirMule拥有创新的内部推进系统,可让您在狭窄的空间内工作。


与货物长平底船的A160T蜂鸟在1000磅
K-MAX设计的特点是两个相反旋转的重叠螺旋桨,无需转向螺钉,增加升力并减少占地面积; 卡曼表示,这样可以将霍尼韦尔T1800-53燃气涡轮发动机生产的所有17 HP导向主螺钉,从而增加升力。 当运输3109 kg的最大载荷时,K-MAX可以在80海里范围内以214节点的速度飞行; 无负载时,速度为100节点,范围为267海里。 基本上是一个改进的载人平台,必要时可以配备K-MAX,因为机载控制器是留下的。
Rotorcraft计划副总裁Jeff Bentle说:“团队更专注于满足海军陆战队的要求,而不是探索开发平台的其他方式。 他解释说,该小组正在对飞机进行改造,并增加了许多系统,包括直接和间接视觉通信系统,战术数据通道,飞行控制系统和冗余INS / GPS系统(均具有冗余)。
使用的材料:
www.janes.com
www.vecna.com
www.ir.elbitsystems.com
www.bostondynamics.com
www.lockheedmartin.com
www.oshkoshdefense.com
www.darpa.mil
www.aeronautics-sys.com
信息