机器人化的巨大飞跃

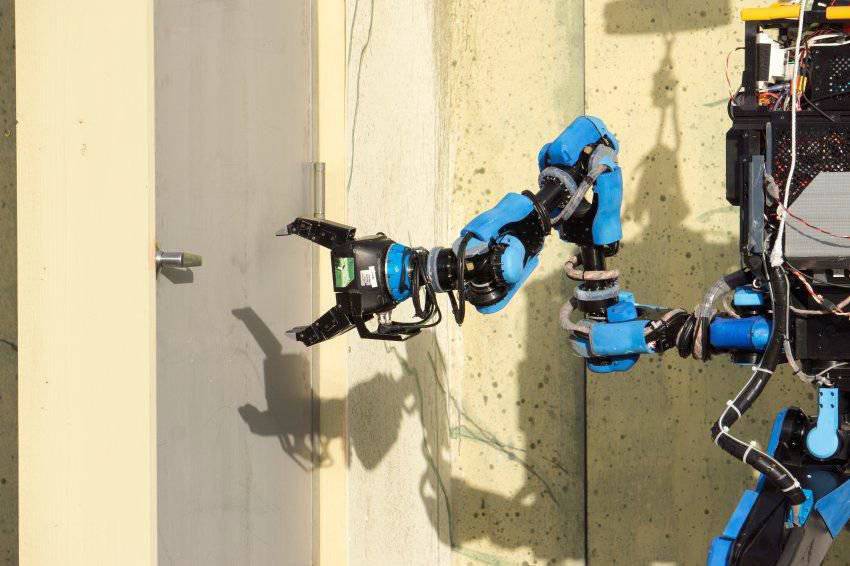
CHIMP执行最困难的任务之一 - 尝试将消防水带连接到消防栓
竞赛 机器人 由国防高级研究计划局 DARPA 主办的机器人挑战赛有望彻底改变系统的功能和设计方式。 让我们看看这个事件并评估一些关键参与者的意见。
11 March 2011在日本是一场强烈的地震,震中位于本州岛东海岸约70公里处。 由于具有9点功率的地震,形成的波浪达到40米的高度并且向内陆扩展到10 km。
福岛第一核电站阻碍了一场毁灭性的海啸。在火车站的巨浪冲击下,反应堆发生了灾难性的破坏。 这次事件是自1986切尔诺贝利事故以来最严重的核灾难。 该事件构成了该场景的基础,可能是当今机器人最重要的程序之一 - DRC(DARPA机器人挑战赛 - 美国国防部高级研究与发展办公室计划下的机器人系统实际测试)。
4月2012宣布了DRC测试,并选择了救灾作为测试方案。 在这种情况下,新系统的开发是必要的,主要是因为它是美国白宫和国防部长在1月10中确定的美国国防部2012关键任务的一部分。 12月,作为这些比赛的一部分,今年的2013通过了一个重要的阶段,当时首次在佛罗里达举行了“全面”测试。
DRC以几个创新方面而着称,它们结合了虚拟和现场测试,它们对资金充足且没有资金的团队开放。 该事件由四个所谓的部分或轨道组成; DARPA为赛道A和赛道B两条赛道提供了财务支持,并为所有新来者开设了这些比赛。
在四个轨道中,两个(轨道A和轨道B)获得资金。 在对比赛文件进行一般性公告和提交后,DARPA选择了7个跟踪A团队,负责开发新的硬件和软件; 在Track B中,11团队只开发了软件。
C轨道没有资金,并且对来自世界各地的新进入者开放; 作为Track Track的参与者。首先,他们在参与者中使用机器人的虚拟模拟程序来测试他们的软件。 Track D适用于希望开发硬件和软件但在任何阶段都没有DARPA资金的外国参与者。
创新DRC方法的关键是VRC组件(虚拟机器人挑战 - 机器人系统的虚拟测试)。 获得最佳位置的团队 - 无论是来自B路还是C路 - 将获得DARPA的资助,以及使用Boston Dynamics的Atlas机器人,他们将参与现场测试。
今年5月,来自Track B和Track C的2013团队申请获得了下个月举办的VRC资格。 在100注册团队中,只有26继续使用VRC,整个7团队接受了全面测试。
VRC由高级虚拟空间持有,由Apache 2开源基金会授权。 这些团队的任务是完成第一次现场测试中为真实机器人确定的八项任务中的三项。
试
虽然在VRC中展示的机器人的能力令人印象深刻,但他们在现场测试中表现的方式却没有百分之百的确定性; 然而,DRC项目主管Jill Pratt表示他对自己的能力非常满意。 “我们预计,由于它是测试的第一个物理部分,我们可以看到很多硬件故障,但事实上并非如此,所有硬件都非常可靠。 前几个团队,尤其是前三个团队,即使我们故意干扰了沟通渠道,也获得了超过一半的分数并取得了重大进展。“
Pratt对Atlas机器人的能力也印象深刻,“他真的超出了我们的期望......波士顿动力公司做得很好,所以没有任何一个团队会遭遇任何硬件故障。”
然而,仍有改进的余地,这些是具有有限工作空间的臂臂和机器人的液压系统的泄漏。 现代化进程甚至在12月2013活动开始之前就开始了。 普拉特说,他还希望增加决赛中不同乐器的数量,机器人很可能会带有乐器,他们需要在执行剧本时选择合适的乐器并进行更改。
佛罗里达人类认知能力与机器研究所的研究员兼软件工程师Doug Steven也对Atlas机器人表示赞赏,他在Track B的团队在现场测试中排名第二。 “这是一个非常棒的机器人...我们用200小时的时间工作了两三个月,这对于一个实验平台来说非常不寻常 - 能够稳定地工作而不会破坏。”
在刚果民主共和国机器人令人印象深刻的能力背后,实际上是英勇的努力; 任务的设计特别困难,并且需要测试团队开发的硬件和软件部件。
尽管任务很艰巨,普拉特并不认为DARPA过分夸大了标准,并指出每项任务都是由至少一个团队完成的。 最困难的任务是驾驶和连接软管。 根据斯蒂芬的说法,第一个是最困难的:“我肯定会说 - 驾驶汽车的任务,甚至不是因为驾驶本身。 如果你想完全自动驾驶,这是非常困难的,那么你总是有一个机器人操作员。 驾驶并不是那么困难,但是下车比人们想象的要困难得多; 这就像解决一个大的三维拼图。“
根据必须在12月2014中通过的DRC决赛的格式,所有任务将合并为一个连续场景。 所有这一切都是为了使其更加可靠,并为团队提供如何实施的战略选择。 这个难度也会增加,普拉特补充说:“我们在霍姆斯特德表现出色的球队的任务就是让比赛变得更加艰难。 我们将拆除连接的电缆,移除通信电缆并用无线信道替换它们,同时我们将降低通信质量,使其变得比以前的测试更糟。“
“我此刻的计划是让连接断断续续,有时它必须完全消失,我相信这应该是按照随机顺序完成的,就像真正的灾难一样。 我们会看到机器人可以在几秒钟或者一分钟内做些什么,试图自己做一些子任务,即使它们没有完全切断操作员的控制,我认为这将是一个非常有趣的景象。
普拉特表示,安全系统也将在决赛中被删除。 “这意味着机器人将不得不承受跌倒,这也意味着它必须靠自身上升,这实际上非常困难。”

Schaft机器人从路径中移除碎片
挑战和战略
在测试期间的八个团队中,五个使用了ATLAS机器人,然而,Track A - Team Schaft冠军和Team Tartan Rescue三等奖获得者的参与者使用了他们的设计。 Tartan Rescue来自卡内基梅隆大学(CMU)国家机器人工程中心,在DRC下进行测试,该团队开发了CMU高智能移动平台(CHIMP)。 来自Tartan Rescue的Tony Stentz解释了团队开发自己的系统的理由:“使用已经准备好的人形机器人可能更安全,但我们知道我们可以创建一个更好的设计来应对灾难。”
“我们知道我们必须创造一种近似人形的东西,但我们不喜欢在人形机器人中保持平衡的需要。 当双腿机器人移动时,他们需要保持平衡,以免跌落而在平坦的表面上相当困难,但是当你谈到穿过建筑垃圾并攻击可以移动的物体时,它变得更加困难。 因此,CHIMP是静态稳定的,它位于相当宽的基部上,并且在垂直位置上它在腿上的一对毛毛虫上滚动,因此它可以来回转动并转动到位。 它易于定位,可以露出双手,携带任务所需的一切; 当他需要在更加困难的地形上移动时,他可以摔倒四肢,因为他也跟踪了他手上的螺旋桨。“
来自不同轨道的团队不可避免地在准备测试时遇到不同的问题,人类认知能力研究所和机器专注于软件开发,因为这是最困难的问题 - 从VRC过渡到全面的任务。 斯蒂芬说:“当Atlas机器人交付给我们时,你可以使用两种”模式“。 第一个是由波士顿动力公司提供的一组简单的动作,你可以用它来进行动作并且有点瑕疵。 事实证明,大多数团队在Homestead的竞争中使用了Boston Dynamics的这些内置模式,很少有团队编写自己的机器人控制软件,没有人为整个机器人编写自己的软件......“
“我们从头开始编写自己的软件,它是一个全身控制器,也就是说,它是一个在所有任务中工作的控制器,我们从未切换到其他程序或其他控制器...因此,最困难的任务之一是创建程序代码在阿特拉斯上运行它,因为当波士顿动力公司把它呈现给我们时它是一种黑盒子,但它是他们的机器人和他们的IP,所以我们真的无法访问低级别的机载计算机。我们的软件在外部计算机上运行然后绑定使用 我吃纤维的API(应用编程接口)与一个机载计算机,并有长时间的延迟和问题,这里的同步已经变得非常难以控制如此复杂的系统为阿特拉斯»。
尽管从头开始编写自己的代码对于人类认知能力和机器研究所来说当然更加困难和耗时,但斯蒂芬认为这种方法更有利可图,因为问题可以比依赖波士顿动力学更快地解决。 此外,附带的Atlas软件并不像波士顿动力公司在其自己的演示中使用的软件那样先进“当他们发送机器人时...他们非常公开地说,当Boston Dynamics将视频放入Youtube时,动作与您看到的不一样一个致力于该公司软件的机器人。 这是一个不太先进的版本...这足以学习机器人。 我不知道他们是否会将代码交给团队使用,我认为他们并不希望每个人都编写自己的软件。 也就是说,与机器人放在一起的东西最初是可能的,并不打算在实际的DRC测试中执行所有八项任务。“
对于Tartan Rescue团队来说,最大的挑战是在开发新平台和相关软件时必须遵守的紧迫时间表。 “15个月前,CHIMP只是一个概念,纸上绘图,所以我们不得不开发零件,制作零件,组装所有零件并测试一切。 我们知道这需要花费大部分时间,我们迫不及待地开始编写软件,直到机器人准备好,所以我们开始并行开发软件。 我们实际上没有一个完整的机器人用于工作,所以我们使用模拟器和硬件代替开发。 例如,我们有一个单独的手臂操纵器,我们可以在检查单个肢体的某些东西时使用,“Stentz解释说。
关于数据传输渠道恶化会带来的困难,Stentts指出,这一决定是从一开始就专门针对这种情况做出的,这不是一个非常困难的问题。 “我们在机器人的头部安装了传感器 - 激光测距仪和摄像机 - 这使我们能够构建完整的3-D纹理贴图和机器人周围环境的模型; 这是我们从操作员那里用来控制机器人的东西,我们可以根据可用的频段和通信通道想象不同分辨率下的这种情况。 我们可以集中注意力,在某些区域获得更高的分辨率,在其他区域降低分辨率。 我们能够直接远程控制机器人,但是当我们为机器人定义目标时,我们更喜欢更高级别的控制,这种控制模式更能抵抗信号丢失和延迟。
Schaft机器人打开了门。 未来的系统将需要改进的机器人处理能力。
下一步
Stentz和Stephen表示,他们的团队目前正在评估他们在实际试验中的能力,以评估需要采取什么行动才能取得进展,他们希望得出DARPA的结论回忆以及有关将会发生什么的其他信息。总决赛。 斯蒂芬表示,他们也希望收到Atlas的一些修改,并注意到已经批准的最终要求 - 使用车载电源。 对于CHIMP来说,这不是问题,因为带有电驱动器的机器人已经可以携带自己的电池。
Stentz和Stephen一致认为,在开发机器人系统领域和创建可用于救灾方案的平台类型时,需要解决许多问题。 “我想说世界上没有一件事可以成为灵丹妙药。 我认为在硬件方面,具有更灵活处理能力的机器可能很有用。 至于软件,我认为机器人需要更高程度的自主权,以便他们在没有通信渠道的情况下在远程操作方面做得更好; 他们可以更快地完成任务,因为他们自己做了很多事情,并且每单位时间做出更多的决定。 我觉得很好 这个消息 DSTPA主持下的竞赛实际上是为了促进硬件和软件领域,“Stentz说。
斯蒂芬认为,还需要改进技术开发。 “作为一名程序员,我看到了许多改进软件的方法,而且我也看到了在这些机器上工作的改进机会。 许多有趣的事情发生在实验室和大学里,这些过程可能没有强大的文化,所以有时这项工作是随意的。 此外,看看真正有趣的DRC测试项目,您会发现硬件和创新方面有很多改进的机会。“
斯蒂芬指出,Atlas是可以实现的目标的主要例子 - 在短时间内开发出可行的系统。
然而,对于Pratt来说,问题更加明确,他认为应该首先进行软件开发。 “我想传达的想法是,软件的主要部分是在耳朵之间。 我的意思是在操作员的大脑中发生了什么,机器人大脑中发生了什么以及两者如何相互认同。 我们想要关注机器人的硬件,我们仍然遇到问题,例如,我们在生产成本和电源效率方面存在问题......毫无疑问,最困难的部分是软件; 这是机器人 - 人机界面的软件代码和执行机器人自身任务的软件代码,包括感知和态势感知,对世界上发生的事情的认识以及基于机器人感知的选择。
普拉特认为,寻找机器人的商业应用是先进系统发展和工业发展的关键。 “除了消除灾难和一般防御领域外,我认为我们确实需要商业应用。 事实是,与商业市场相比,市场,国防,快速反应和救灾都是微不足道的。“
“在DARPA的管理中,我们非常喜欢谈论它,让我们以手机为例。 DARPA资助了导致手机技术发展的许多发展......如果它只是手机本身所针对的国防市场,由于巨大的商业市场,它们将比现在多出几个数量级,允许手机获得令人难以置信的可访问性...“
“在机器人技术领域,我们的观点是我们需要这一系列事件。 我们需要看到商业世界购买将导致价格下降的应用程序,之后我们将能够专门为军方创建系统,其中将投资商业领域的投资。
八个第一队将参加12月的2014试验 - Team Schaft,IHMC Robotics,Tartan Rescue,MIT团队,Robosimian,TRAClabs团队,WRECS和Team Trooper。 每个人将获得一百万美元来改善他们的决定,最终,获胜团队将获得2百万奖金,尽管大多数人的认可比金钱更有价值。

NASA的Robosimian喷气推进实验室采用了不同寻常的设计。
虚拟物品
在DRC测试中包含两条DARPA轨道,其中只有软件开发团队参与,这说明管理层希望向尽可能广泛的参与者开放项目。 此前,此类技术开发计划是国防公司和研究实验室的特权。 然而,创建一个虚拟空间,每个团队都可以测试其软件,这使得那些没有或几乎没有开发机器人软件经验的竞争对手能够与该领域的知名公司竞争。 DARPA还将模拟空间视为DRC测试的长期遗产。
在2012中,DARPA Authority委托开源软件基金会为挑战赛开发虚拟空间,该组织开始使用Gazebo软件包创建一个开放模型。 Gazebo能够在三维世界中模拟机器人,传感器和物体,它旨在提供来自传感器的真实数据以及被描述为物体之间“物理上可信的相互作用”的数据。
开源基金会主席Brian Gjorki表示Gazebo因其经过验证的能力而被使用。 “这个包广泛用于机器人社区,这就是DARPA想要赌它的原因,因为我们看到了它的优点; 我们可以创建一个由开发人员和用户组成的社区。“
虽然Gazebo已经是一个众所周知的系统,但Görki指出,虽然仍有改进的余地,但必须采取措施以满足DARPA规定的要求。 “我们很少模拟步行机器人,我们主要关注轮式平台,并且步行机器人的模拟有一些方面是完全不同的。 您必须非常小心地进行联系解决方案以及如何为机器人建模。 通过这种方式,您可以获得良好的参数以换取准确性。 对机器人的物理进行详细建模需要花费很多精力,因此您可以获得高质量的建模并几乎实时地获得工作机器人,而不像工作在十分之一或百分之一的实时工作,这很可能是全部你投入的努力。“

模拟阿特拉斯机器人在虚拟DRC比赛期间进入汽车
关于虚拟空间的Atlas机器人仿真,Gorky说基金会应该从一个基本数据集开始。 “我们从波士顿动力公司提供的模型开始,我们没有从计算机辅助设计的详细模型开始,我们得到了一个简化的运动学模型。 基本上是一个文本文件,其中写有这条腿的长度,它有多大,等等。 对我们来说,困难在于正确和准确地调整该模型,以便我们可以对工作参数进行折衷以换取准确性。 如果您以简化的方式对其进行建模,那么您可以在底层物理引擎中产生一些不准确性,这将使其在某些情况下不稳定。 因此,很多工作是稍微改变模型,并在某些情况下编写自己的代码来模拟系统的某些部分。 这不仅仅是一个简单的物理模拟,还有一个水平,我们不会下降。“
Pratt积极地了解VRC和模拟空间所取得的成就。 “我们做过以前没有的事情,我们从物理角度创建了真实的技术建模,可以实时运行,以便操作员可以执行他们的互动工作。 这对你来说是非常必要的,因为我们正在谈论一个人和一个机器人作为一个团队,所以机器人的模拟应该在与男人相同的时间范围内工作,这意味着实时。 反过来,在模型的准确性和稳定性之间需要妥协......我相信我们在虚拟竞争中取得了很多成就。“
斯蒂芬解释说,在开发软件时,人类认知能力研究所和IHMC机器面临着各种挑战。 “我们使用自己的建模条件,我们将其与Gazebo集成作为虚拟竞赛的一部分,但我们的大部分开发都在我们的平台上进行,称为Simulation Construction Set ...我们在运行真正的机器人时使用了我们的软件,我们在建模和这是我们的基石之一,我们在很多方面都依赖于良好的软件开发经验。“
斯蒂芬说,在IHMC,他们更喜欢使用Java编程语言,因为它具有“一个非常令人印象深刻的工具复合体,并且已经围绕它发展。” 他指出,当将Gazebo与其自己的软件结合使用时,“主要问题是我们用Java编写软件,大多数机器人软件都使用C或C ++语言,这对嵌入式系统非常有用。 但我们希望以我们想要的方式在Java中完成工作 - 使代码在特定的时间范围内工作,因为它是用C或C ++实现的,但除了我们之外没有人使用它。 这是所有Gazebo程序使用我们的Java代码的一个大问题。“
DARPA和开源基金会继续开发建模和虚拟空间并对其进行改进。 “我们开始引入一些元素,这些元素将使模拟器在紧急救援站点之外的不同情况下更有用。 例如,我们采用竞争中使用的软件(称为CloudSim,因为它在“云”计算环境中执行模拟)并开发它以便在云服务器上使用它,“Gerky说。
将模拟环境打开以供一般使用并在云环境中使用的主要优点之一是,可以通过服务器上更强大的系统执行高级计算,从而允许人们使用他们的轻量级计算机甚至上网本和平板电脑。在你的工作场所工作。 Gerkie还认为,这种方法对于培训以及产品设计和开发非常有用。 “您将能够从世界上任何地方访问此仿真环境,并在其中尝试新的机器人。”
使用的材料:
www.janes.com
www.darpa.mil
www.bostondynamics.com
信息