查找隐形:潜艇检测系统
无形的船只能够从最意想不到的地方突然袭击,正是直到最近才被认为是潜艇的那种潜艇。 潜艇的微妙之处尤其在原子和空气独立发电厂出现之后(在20世纪的50中)。 有朝一日,二十世纪可称为潜艇世纪。 在21世纪,潜艇舰队要么根本不存在,要么以最激进的方式改变。

然而,目前形式的潜艇舰队很可能会死亡。 大海不再是船只能够对敌人隐形的空间。 而这种变化是由于系统的出现导致您可以跟踪任何大型水下物体的任何移动。
从噪音引导系统到复杂的FOSS
故事 潜艇的发展 - 以及它们的大规模建造始于20世纪的第一季度 - 是关于攻击和防御手段竞争的着名论点的例证。 最初,根本没有检测潜水艇的方法,根本不存在。 在潜艇的表面位置,由于设计的特殊性,具有很小的能见度。 这些战斗品质,使潜艇成为最强大的海洋 武器 他们的时代一直持续到1941年。 当时是在英国反潜飞机上 航空 雷达首次出现。 他满怀信心地发现了处于水面位置的潜艇,而当时的潜艇名称不如“潜水”那么多,因为至少有一半的军事行动必须“落水”。 雷达探测到的船没有时间跳水,几乎被完全摧毁。 几乎同时,英国人也创造了有效的声纳,反潜舰队开始自信地将潜艇定位并摧毁水下潜艇。 结果,在战争结束之前,德国潜艇的效力 舰队 实际上减少到零。
然而,随着核潜艇舰队的出现,在地面位置探测潜艇的能力消失了 - 在战斗巡航期间船只不再浮出水面。 并且通过搜索和攻击小组的力量在水下寻找潜艇是非常麻烦的。 这是创建全球水下照明系统,尤其是水声系统的推动力。 与此同时,被动水下声学或噪声探测成为探测潜艇的主要手段,主要是因为它相对便宜,技术简单,能够远距离探测目标。 最令人印象深刻的音响系统是美国在冷战期间创造的着名系统。 SOSUS。 这是一个巨大的声学天线领域,在大西洋和太平洋海域延伸。 在我们的近北部,它们位于罗弗敦盆地的整个空间 - 从挪威海岸到扬梅岛。 在系统部署之后,苏联潜艇隐藏在大西洋和太平洋的通道几乎是不可能的:潜艇在距离数百公里的地方被发现。
与此同时,核潜艇原本是一个相当嘈杂的结构。 噪音第一艘美国潜艇 “鹦鹉螺” и “Sivulf” 差不多是一百分贝。 船舶机构(发动机,泵,风扇,轴等)会产生噪音,螺旋桨轰鸣声,船舶周围的水声......噪音降低是抵消噪音查找检测站和SOSUS等系统的唯一方法。 然而,由于其他原因,降低了噪音 - 例如,减少了非接触式鱼雷式炸弹保险丝的响应范围。 设计师完善了螺旋桨的几何形状,提高了制造轴和机器零件的精度,提供了一种减震装置,减振(以及因此噪音)机制,发明了特殊的船体覆盖物。 自上个世纪的70s以来,潜艇的1 dB噪声水平平均降低了两年。 仅在过去的19年 - 从今年的1990到现在 - 美国NPS的平均噪音水平已从0,1 Pa下降了十倍,从0,01 Pa降至XNUMX Pa。
举例说明:从20世纪下半叶开始,使用原子潜艇,即所谓的“猎人船”,成为探测潜艇最有效的方法之一。 然而,在我们这个时代,他们的搜索性能已经下降到一个完全荒谬的程度。 根据外国媒体公布的数据,688I SSN 772“Greenville”型潜艇(1995内置)探测到距离688到1978 km的洛杉矶10型潜艇(内置35)。 这是可以接受的结果。 但现代弗吉尼亚(SSN 774,2004,建造)格林维尔在远处发现从1到4 km(根据独立的英国专家帕尔默)的所有内容。 如果船只只在这样的距离上“看到”彼此,那么它们彼此相邻的非常机动不仅对于“受害者”而且对于“猎人”而言变得致命危险:未看到彼此的船舶意外碰撞的风险急剧增加。
(另外,我们注意到,除了“秘密”邮票之外,不可能看到任何关于俄罗斯潜艇的噪音及其探测距离的真相。)
噪声衰减的GAS低噪声潜艇的探测范围急剧下降,从技术角度来看是一次革命性的事件,恰逢政治上的革命性变化 - 苏联解体。 在20世纪末,苏联(和俄罗斯)的潜艇实际上不再被视为对美国和西欧的军事威胁。 这两种情况产生了深远的影响。 美国改变了发动战争的战略,特别是使用海军部队。 在当地战争和武装冲突中,海军的主要任务不是与敌人的舰队在海上和海洋上进行全球对抗,而是从边缘海域向敌人的领土进行打击。
由于效率降低和敌人实际缺席,SOSUS系统得以保存。 为了解决美国的反潜防御问题,提出了创建可快速部署的多元素区域水下情景照明系统(FOSS)的问题,该系统旨在在计划的作战区域内工作。 主要要求是在FOSS之前:在进入指定的责任区域时立即检测到任何水下物体。 因此结束了全球潜艇探测系统的时间。
现代FOSS变得地方性和复杂性。 它们必须是可快速部署的,多元素的,双静态的或多静态的,基于以网络为中心的架构方法,不同的检测原则(不仅仅是声学),强制提供工作元素,通过空间系统进行通信和定位。 迄今为止,已经创建并测试了这样的系统。
巨人网络
在1990-x的中间 - 美国海军开始使用2000-ies开始并采用执行文件来定义海军的任务和未来海上战争的出现。 除其他规定外,这些概念还包括对反潜战有希望的原则的描述。 就在那时,人们宣布拒绝使用静止无源噪声探测系统(如SOSUS),主动 - 被动声纳系统用于照亮快速部署的水下情况。
什么是这样的系统? 预先放置在海中的一组辐射器(安装在底部或预定深度或拖曳)根据给定程序在指定的频率范围和时间间隔内发送声信号。 这些信号由预先部署的特殊天线的整个网络接收(它们可以放置在潜艇,水面舰艇,倾倒的无线电声学浮标系统,放置在底部的天线阵列等)。 该组作为一个巨大的声纳装置工作,它允许在最短的时间内使用回波信号来获得进入责任区域的目标的坐标。 从FOSS指挥中心,有关目标的信息通过空间通信传输到联合作战部队的指挥中心。 因此,即使是最现代和最安静的潜艇的位置也可以立即建立 - 它的破坏非常简单。
实际上,FOSS元素的部署可能来自各种航母 - 潜艇(使用基于父潜艇的无人驾驶自动潜艇,以及轻型潜水艇),水面舰艇,飞机和直升机。 水下监视系统的主要交付方式应该是制作小型高速表面 LCS船,以及SSGN型潜艇。 在FOSS元素的位置下 - 发射器LELFAS(长寿命低频有源光源)和接收器 ADS(高级可部署系统) - 已经改装了 俄亥俄型潜艇,SSGN 726-729。 此外,明年,第二个SSN 2012子系列的主要多用途潜艇将在774年布局 SSN 784专门为多静电FOSS的交付和放置而配备。
LELFAS声发射器具有半尺寸 鱼雷mk-xnumx (长度约为3 m),放置在标准的鱼雷形管中,设计用于在30日期间连续操作。 它们的信号由位于海床上的ADS噪声发现接收器拾取 - 光学声纳天线花环。
这些接收器看起来像一根直径为2 mm,长度约为20 km的光纤电缆。 在每个接收系统中有两个10公里长的部分,每个部分最多到26模块,在每个模块中有略多于一千个水听器接收信号。 ADS接收器可以在不到五天的时间内秘密部署,发射器的安装时间更短(它们是以可以安装的特殊浮标的形式制造的,包括飞机)。 躺在ADS的地面部分与使用无人居住的水下航行器的指挥所进行通信 - 海上滑翔机 海上滑翔机,执行天线功能。
现代潜艇有能力接近这些系统,通过特殊的对接站连接到它们,因此,秘密控制海域的大片区域。
美国海军在2001年采用了ADS系统,如今已生产了十几套系统。 在7月2003的LELFAS-ADS系统测试期间,在纽芬兰岛附近的架子上,系统在主动 - 被动模式下进行自信检测, PLA SSN 21 范围从30-35 km。
SSGN 726型潜艇在船上配备四组ADS天线,可以创建一个约2500平方英里的“水下照明场”。
一组三艘LCS型船舶,部署了ADS系统并具有用于照射LFAS目标和反潜直升机的船载拖曳发射器,能够监测总面积超过30 000平方x英里的水域(96 100 km2代表310侧的正方形)公里)。
由于应用该系统,没有一个大的水下目标可以被忽视。
未来很小
现在 - 作为一支军事力量的潜艇舰队走到了尽头? 这个问题仍然存在。
所描述的FOSS的弱点在于它们的本地应用。 只有美国的舰队是海洋中的主导力量,它们才能有效地发挥作用。 但如果中国决定将2030的核潜艇舰队带到300部队,其中200将不断部署在太平洋地区,原则上不可能用这种系统来解决反潜战问题。 毫无疑问,从技术上,经济上和组织上来说,中国都有能力做到这一点。
在保持潜艇部队的数量比率的同时,对抗这种潜艇探测系统的手段只能是激进的 - 这是一种核武器,由于显而易见的原因,使用这种武器只是最近的选择。 从理论上讲,旅级扫雷舰和轻型潜水员也可以参与搜索和销毁FOSS系统的发射器和接收器 - 但是,这种工作需要使用真正庞大的机队,可靠地由飞机覆盖。 简而言之,这场比赛是不值得的。
事实上,已经很清楚,可快速部署的自由和开放源码软件的使用将彻底改变海上武装斗争的进程。 以现在的形式使用潜艇将变得几乎不可能。 这意味着未来的潜艇很可能拥有截然不同的外观。 例如,这可能是最有前途的选择:为大型“母”核潜艇配备小型自动水下航行器。 反过来,这些设备将像嵌套娃娃一样包含其他甚至更小的设备,旨在执行各种任务,从通信和侦察到投掷水雷和鱼雷。 “母”船甚至不会接近敌人反潜部队的责任区,几乎察觉不到,很小,但会有无数潜艇去那里。 机器人 狭窄的专业化。 没有 FOSS 能够检测到中型鱼大小的水下航行器。
人们只能猜测将针对他们发明什么对策。
FOSS原则
潜艇(在中心)由一个系统检测,该系统由水面舰艇牵引的散热器和许多接收器组成:水面舰艇的牵引天线,潜艇的HAM,声纳浮标和铺设在地面上的线性天线。 由于卫星定位系统,在任何给定时间每个FOSS元件的坐标都是已知的。 船舶连接和FOSS的工作由空间通信,AWACS系统协调; 对于该化合物的任何元素 - 潜艇或水面舰艇 - 可以使用破坏被探测敌人的船只的方法。 情景系统从水下和表面部分点亮。 航天器,DRLO飞机和水面舰艇用于照亮表面部件。 关于敌对行动局势的综合信息集中在水面舰艇和岸上的指挥所。
检测方法
为照亮潜艇使用的直升机降低了声纳站。 水声浮标和部署的ADS阵列以多静态模式检测潜艇。
除了声纳之外,船还可以被另外三十个不同的物理场和船的动作引起的现象所检测到。
相应的传感器跟踪由船舶的存在引起的环境自然背景的变化。 例如,由于船的通过,水压变化,形成了增加的静水压力波,其可以容易地固定。 地震传感器可以跟踪潜艇通过引起的海床振荡(船对水施加压力,而海床则对海床施加压力)。 由于船的通过,水下底部的照明,磁场,地球的引力场发生变化。 最后,从一颗卫星,在某些条件下,你可以看到一条船的波浪痕迹,即使它深入水下。 现代反潜战系统使用一系列搜索工具 - 应该有用。
一切尽在掌控

没有人会被忽视。 在水下照明系统的帮助下,潜艇可以在起航后立即进行追踪。
一种SSGN-726型PLA作为提供主动 - 被动型定位快速部署系统的手段,其上有四组ADS天线,可以创建一个面积超过2500平方英里的“水下照明领域”。 该地图显示了北方舰队基地的FOSS可能的部署选项。 每个圆圈都是由FOSS传感器限定的区域,其中水下情况得到完全控制。
然而,目前形式的潜艇舰队很可能会死亡。 大海不再是船只能够对敌人隐形的空间。 而这种变化是由于系统的出现导致您可以跟踪任何大型水下物体的任何移动。
从噪音引导系统到复杂的FOSS
故事 潜艇的发展 - 以及它们的大规模建造始于20世纪的第一季度 - 是关于攻击和防御手段竞争的着名论点的例证。 最初,根本没有检测潜水艇的方法,根本不存在。 在潜艇的表面位置,由于设计的特殊性,具有很小的能见度。 这些战斗品质,使潜艇成为最强大的海洋 武器 他们的时代一直持续到1941年。 当时是在英国反潜飞机上 航空 雷达首次出现。 他满怀信心地发现了处于水面位置的潜艇,而当时的潜艇名称不如“潜水”那么多,因为至少有一半的军事行动必须“落水”。 雷达探测到的船没有时间跳水,几乎被完全摧毁。 几乎同时,英国人也创造了有效的声纳,反潜舰队开始自信地将潜艇定位并摧毁水下潜艇。 结果,在战争结束之前,德国潜艇的效力 舰队 实际上减少到零。
然而,随着核潜艇舰队的出现,在地面位置探测潜艇的能力消失了 - 在战斗巡航期间船只不再浮出水面。 并且通过搜索和攻击小组的力量在水下寻找潜艇是非常麻烦的。 这是创建全球水下照明系统,尤其是水声系统的推动力。 与此同时,被动水下声学或噪声探测成为探测潜艇的主要手段,主要是因为它相对便宜,技术简单,能够远距离探测目标。 最令人印象深刻的音响系统是美国在冷战期间创造的着名系统。 SOSUS。 这是一个巨大的声学天线领域,在大西洋和太平洋海域延伸。 在我们的近北部,它们位于罗弗敦盆地的整个空间 - 从挪威海岸到扬梅岛。 在系统部署之后,苏联潜艇隐藏在大西洋和太平洋的通道几乎是不可能的:潜艇在距离数百公里的地方被发现。
与此同时,核潜艇原本是一个相当嘈杂的结构。 噪音第一艘美国潜艇 “鹦鹉螺” и “Sivulf” 差不多是一百分贝。 船舶机构(发动机,泵,风扇,轴等)会产生噪音,螺旋桨轰鸣声,船舶周围的水声......噪音降低是抵消噪音查找检测站和SOSUS等系统的唯一方法。 然而,由于其他原因,降低了噪音 - 例如,减少了非接触式鱼雷式炸弹保险丝的响应范围。 设计师完善了螺旋桨的几何形状,提高了制造轴和机器零件的精度,提供了一种减震装置,减振(以及因此噪音)机制,发明了特殊的船体覆盖物。 自上个世纪的70s以来,潜艇的1 dB噪声水平平均降低了两年。 仅在过去的19年 - 从今年的1990到现在 - 美国NPS的平均噪音水平已从0,1 Pa下降了十倍,从0,01 Pa降至XNUMX Pa。
举例说明:从20世纪下半叶开始,使用原子潜艇,即所谓的“猎人船”,成为探测潜艇最有效的方法之一。 然而,在我们这个时代,他们的搜索性能已经下降到一个完全荒谬的程度。 根据外国媒体公布的数据,688I SSN 772“Greenville”型潜艇(1995内置)探测到距离688到1978 km的洛杉矶10型潜艇(内置35)。 这是可以接受的结果。 但现代弗吉尼亚(SSN 774,2004,建造)格林维尔在远处发现从1到4 km(根据独立的英国专家帕尔默)的所有内容。 如果船只只在这样的距离上“看到”彼此,那么它们彼此相邻的非常机动不仅对于“受害者”而且对于“猎人”而言变得致命危险:未看到彼此的船舶意外碰撞的风险急剧增加。
(另外,我们注意到,除了“秘密”邮票之外,不可能看到任何关于俄罗斯潜艇的噪音及其探测距离的真相。)
噪声衰减的GAS低噪声潜艇的探测范围急剧下降,从技术角度来看是一次革命性的事件,恰逢政治上的革命性变化 - 苏联解体。 在20世纪末,苏联(和俄罗斯)的潜艇实际上不再被视为对美国和西欧的军事威胁。 这两种情况产生了深远的影响。 美国改变了发动战争的战略,特别是使用海军部队。 在当地战争和武装冲突中,海军的主要任务不是与敌人的舰队在海上和海洋上进行全球对抗,而是从边缘海域向敌人的领土进行打击。
由于效率降低和敌人实际缺席,SOSUS系统得以保存。 为了解决美国的反潜防御问题,提出了创建可快速部署的多元素区域水下情景照明系统(FOSS)的问题,该系统旨在在计划的作战区域内工作。 主要要求是在FOSS之前:在进入指定的责任区域时立即检测到任何水下物体。 因此结束了全球潜艇探测系统的时间。
现代FOSS变得地方性和复杂性。 它们必须是可快速部署的,多元素的,双静态的或多静态的,基于以网络为中心的架构方法,不同的检测原则(不仅仅是声学),强制提供工作元素,通过空间系统进行通信和定位。 迄今为止,已经创建并测试了这样的系统。
巨人网络
在1990-x的中间 - 美国海军开始使用2000-ies开始并采用执行文件来定义海军的任务和未来海上战争的出现。 除其他规定外,这些概念还包括对反潜战有希望的原则的描述。 就在那时,人们宣布拒绝使用静止无源噪声探测系统(如SOSUS),主动 - 被动声纳系统用于照亮快速部署的水下情况。
什么是这样的系统? 预先放置在海中的一组辐射器(安装在底部或预定深度或拖曳)根据给定程序在指定的频率范围和时间间隔内发送声信号。 这些信号由预先部署的特殊天线的整个网络接收(它们可以放置在潜艇,水面舰艇,倾倒的无线电声学浮标系统,放置在底部的天线阵列等)。 该组作为一个巨大的声纳装置工作,它允许在最短的时间内使用回波信号来获得进入责任区域的目标的坐标。 从FOSS指挥中心,有关目标的信息通过空间通信传输到联合作战部队的指挥中心。 因此,即使是最现代和最安静的潜艇的位置也可以立即建立 - 它的破坏非常简单。
实际上,FOSS元素的部署可能来自各种航母 - 潜艇(使用基于父潜艇的无人驾驶自动潜艇,以及轻型潜水艇),水面舰艇,飞机和直升机。 水下监视系统的主要交付方式应该是制作小型高速表面 LCS船,以及SSGN型潜艇。 在FOSS元素的位置下 - 发射器LELFAS(长寿命低频有源光源)和接收器 ADS(高级可部署系统) - 已经改装了 俄亥俄型潜艇,SSGN 726-729。 此外,明年,第二个SSN 2012子系列的主要多用途潜艇将在774年布局 SSN 784专门为多静电FOSS的交付和放置而配备。
LELFAS声发射器具有半尺寸 鱼雷mk-xnumx (长度约为3 m),放置在标准的鱼雷形管中,设计用于在30日期间连续操作。 它们的信号由位于海床上的ADS噪声发现接收器拾取 - 光学声纳天线花环。
这些接收器看起来像一根直径为2 mm,长度约为20 km的光纤电缆。 在每个接收系统中有两个10公里长的部分,每个部分最多到26模块,在每个模块中有略多于一千个水听器接收信号。 ADS接收器可以在不到五天的时间内秘密部署,发射器的安装时间更短(它们是以可以安装的特殊浮标的形式制造的,包括飞机)。 躺在ADS的地面部分与使用无人居住的水下航行器的指挥所进行通信 - 海上滑翔机 海上滑翔机,执行天线功能。
现代潜艇有能力接近这些系统,通过特殊的对接站连接到它们,因此,秘密控制海域的大片区域。
美国海军在2001年采用了ADS系统,如今已生产了十几套系统。 在7月2003的LELFAS-ADS系统测试期间,在纽芬兰岛附近的架子上,系统在主动 - 被动模式下进行自信检测, PLA SSN 21 范围从30-35 km。
SSGN 726型潜艇在船上配备四组ADS天线,可以创建一个约2500平方英里的“水下照明场”。
一组三艘LCS型船舶,部署了ADS系统并具有用于照射LFAS目标和反潜直升机的船载拖曳发射器,能够监测总面积超过30 000平方x英里的水域(96 100 km2代表310侧的正方形)公里)。
由于应用该系统,没有一个大的水下目标可以被忽视。
未来很小
现在 - 作为一支军事力量的潜艇舰队走到了尽头? 这个问题仍然存在。
所描述的FOSS的弱点在于它们的本地应用。 只有美国的舰队是海洋中的主导力量,它们才能有效地发挥作用。 但如果中国决定将2030的核潜艇舰队带到300部队,其中200将不断部署在太平洋地区,原则上不可能用这种系统来解决反潜战问题。 毫无疑问,从技术上,经济上和组织上来说,中国都有能力做到这一点。
在保持潜艇部队的数量比率的同时,对抗这种潜艇探测系统的手段只能是激进的 - 这是一种核武器,由于显而易见的原因,使用这种武器只是最近的选择。 从理论上讲,旅级扫雷舰和轻型潜水员也可以参与搜索和销毁FOSS系统的发射器和接收器 - 但是,这种工作需要使用真正庞大的机队,可靠地由飞机覆盖。 简而言之,这场比赛是不值得的。
事实上,已经很清楚,可快速部署的自由和开放源码软件的使用将彻底改变海上武装斗争的进程。 以现在的形式使用潜艇将变得几乎不可能。 这意味着未来的潜艇很可能拥有截然不同的外观。 例如,这可能是最有前途的选择:为大型“母”核潜艇配备小型自动水下航行器。 反过来,这些设备将像嵌套娃娃一样包含其他甚至更小的设备,旨在执行各种任务,从通信和侦察到投掷水雷和鱼雷。 “母”船甚至不会接近敌人反潜部队的责任区,几乎察觉不到,很小,但会有无数潜艇去那里。 机器人 狭窄的专业化。 没有 FOSS 能够检测到中型鱼大小的水下航行器。
人们只能猜测将针对他们发明什么对策。
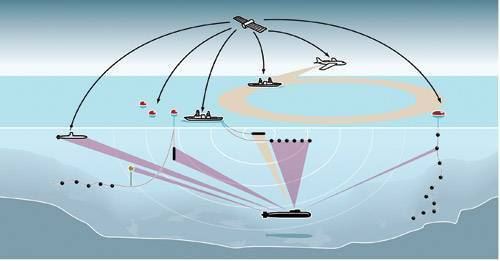
FOSS原则
潜艇(在中心)由一个系统检测,该系统由水面舰艇牵引的散热器和许多接收器组成:水面舰艇的牵引天线,潜艇的HAM,声纳浮标和铺设在地面上的线性天线。 由于卫星定位系统,在任何给定时间每个FOSS元件的坐标都是已知的。 船舶连接和FOSS的工作由空间通信,AWACS系统协调; 对于该化合物的任何元素 - 潜艇或水面舰艇 - 可以使用破坏被探测敌人的船只的方法。 情景系统从水下和表面部分点亮。 航天器,DRLO飞机和水面舰艇用于照亮表面部件。 关于敌对行动局势的综合信息集中在水面舰艇和岸上的指挥所。
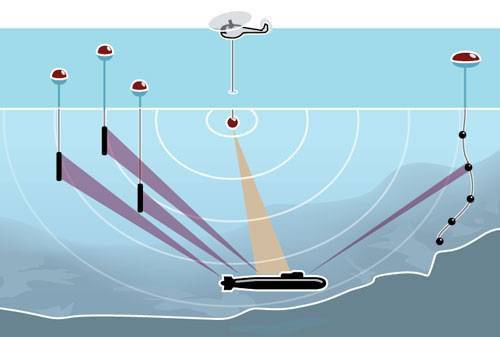
检测方法
为照亮潜艇使用的直升机降低了声纳站。 水声浮标和部署的ADS阵列以多静态模式检测潜艇。
除了声纳之外,船还可以被另外三十个不同的物理场和船的动作引起的现象所检测到。
相应的传感器跟踪由船舶的存在引起的环境自然背景的变化。 例如,由于船的通过,水压变化,形成了增加的静水压力波,其可以容易地固定。 地震传感器可以跟踪潜艇通过引起的海床振荡(船对水施加压力,而海床则对海床施加压力)。 由于船的通过,水下底部的照明,磁场,地球的引力场发生变化。 最后,从一颗卫星,在某些条件下,你可以看到一条船的波浪痕迹,即使它深入水下。 现代反潜战系统使用一系列搜索工具 - 应该有用。
一切尽在掌控
没有人会被忽视。 在水下照明系统的帮助下,潜艇可以在起航后立即进行追踪。
一种SSGN-726型PLA作为提供主动 - 被动型定位快速部署系统的手段,其上有四组ADS天线,可以创建一个面积超过2500平方英里的“水下照明领域”。 该地图显示了北方舰队基地的FOSS可能的部署选项。 每个圆圈都是由FOSS传感器限定的区域,其中水下情况得到完全控制。
信息