Pilot Walker“Ortonog”
具有行走推进力的自行式车辆长期以来吸引了科学家,工程师和潜在用户。 现有研究清楚地表明了步行者相对于轮式或履带式车辆在几种类型的表面上的优势。 与此同时,迄今为止,步行技术项目都没有离开测试原型的阶段。 高路面性能的代价是设计的复杂性和能够控制表面状况,骨料运行等的必要控制系统。 几天前,演示了下一个步行器样本,旨在解决一些现有问题。

在最近在伏尔加格勒州立技术大学(VolSTU)举行的V国际科学和实践会议“车辆和系统的进展-2013”期间,来自37国家的活动参与者展示了实验仪器“Ortonog”。 步行机由伏尔加格勒技术大学理论力学系和TsKB Titan的工作人员开发,旨在测试控制系统并展示具有原始正交推进装置的助行器的功能。 值得注意的是,Volgograd Ortonog在一年前首次出现,但这些测试的结果受到控制系统不完善的影响。 从那时起,项目开发人员已经改进了机器单元运行的算法,这导致其特性显着增加。 在Ortonog会议的演示中,他在演示现场周围自由行走,接收来自控制面板的命令。
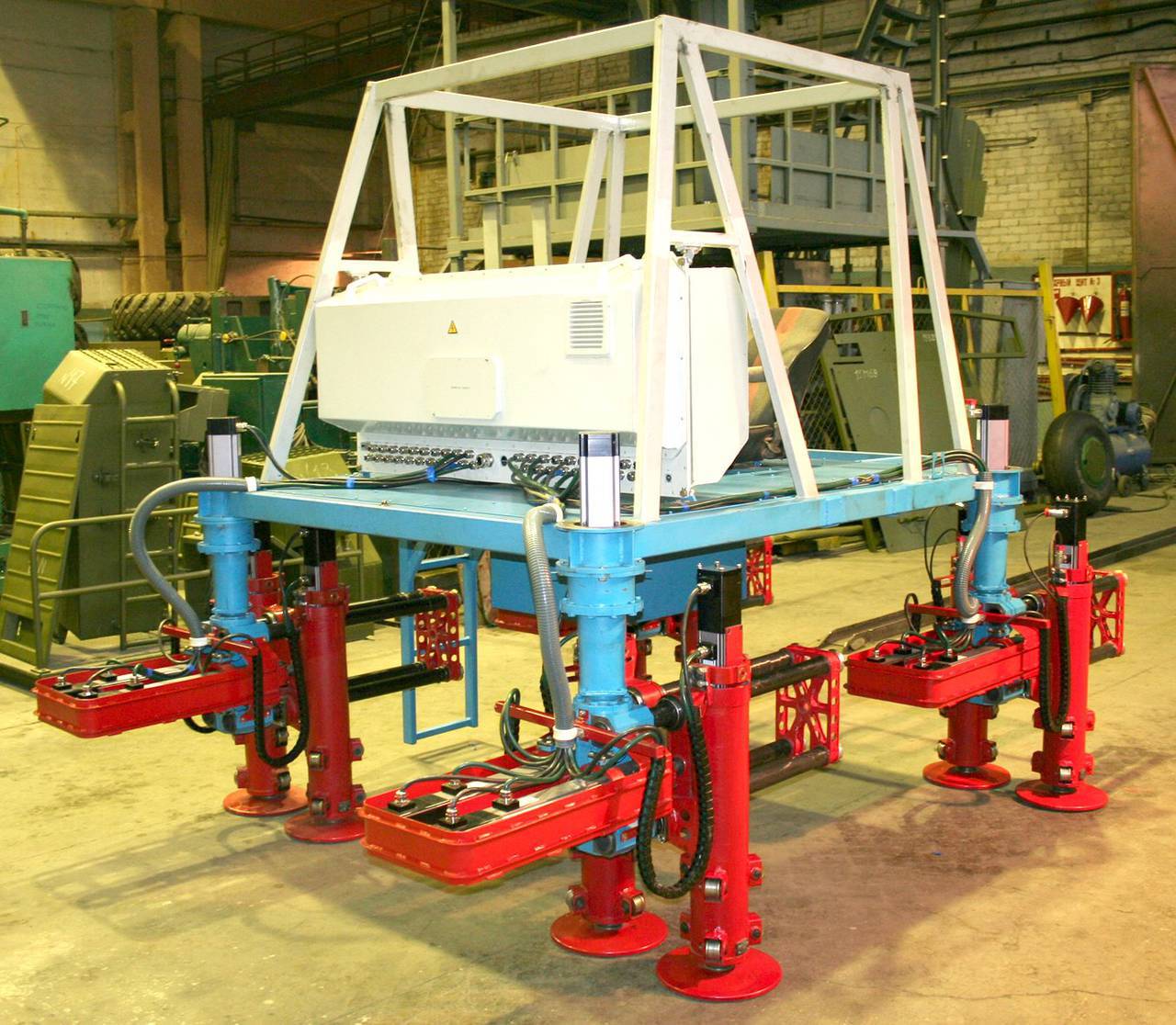
实验机“Ortonog”的设计相对简单,但同时有效。 在设备的框架上安装驾驶室与操作员和控制系统的工作场所。 在它后面安装了一个小型汽油发电机,为步行者提供操作所需的电力。 四个正交步行推进器块固定在框架的下部。 Ortonog汽车的原型上涂有俄罗斯国旗的颜色,除其他外,它还有助于各种单位的视觉识别。 因此,驾驶室元件涂成白色,框架为蓝色,底盘为红色。 重约1200 kg的实验机器的总长度为3,3米,宽度不大于2,2米,高度为2,75米。
底盘的四个块中的每一个通常被分成三个元件:垂直运动机构,水平运动机构和旋转机构。 前者在其组成中具有电动缸,并且负责升高和降低放置在可伸缩杆上的圆形支撑件。 Ortonog有八个这样的支撑,每个底盘两个。 由导轨和致动器组成的水平运动机构设计成使气缸和杆与支架一起移动。 底盘的每个块都有两组导轨和驱动器,每个导轨和一个驱动器都有一个。 最后,转动齿轮围绕垂直轴展开整个底盘块。 实验机器的整个底盘系统基于电驱动器。
Ortonog助行器在平坦表面上的运动如下。 机器从八个支撑中提升四个(机箱中的每个块一个),并使用水平移动机制将它们向前移动。 此外,支撑物落到表面并且循环重复,但是这次其他四个支撑件上升并向前移动。 在运动过程中,Ortonog使用交替垂直位移驱动,水平机构几乎一直工作。 如有必要,激活旋转机制。 它们的同步或单独操作确保旋转到所需的角度。 从设计中可以看出,实验助行器可以以最小半径轮流。
所有运行机构都配有传感器,可收集有关其工作的信息。 信息传输到操作员的驾驶员控制台,并且能够调整机器的操作。 Ortonog项目中最大的问题之一是与驾驶员的工作有关。 实践表明,只有在平坦表面上行驶时,人才能有效地操作机器。 如果需要在崎岖的地形上移动等 复杂的路线,操作员不能独立监控所有机制的工作,并在一个时间或另一个时间选择必要的操作算法。 在这方面,与机器的技术部分同时开发了自动控制复合体。
最初,使用以下控制方法来测试实验机器。 复合体的操作者根据视频系统发送的信息控制设备的自主操作。 如有必要,首先,在克服障碍的同时,他干涉并对步行者的工作进行必要的调整。 绝大多数机器控制动作都是通过自动化进行的,无需人工干预。 在这种情况下,实验装置的自动化仅从传感器接收关于系统的操作和机器在空间中的位置的信息。 没有采取任何措施来使用视频信号。 这种收集控制机器所需信息的方法的结果是电子设备不能绕过障碍物的情况,这需要操作员的干预。

这些测试有助于收集设置自适应步行器控制所需的信息。 特殊设备记录了所有操作员的操作,来自传感器的信息,还记录了来自外部和内置摄像机的信号。 将来,所有记录的数据都进行了比较,并选择了与机制的具体行动相对应的数据片段。 该信息用于“学习”自动化。 乍一看测试和微调控制系统的结果似乎不是太高。 然而,已经在去年年底,Ortonog设备能够独立地在没有操作员帮助的情况下沿着直的和倾斜的表面移动并且无论表面的角度如何都保持所需的身体位置。 此外,该单元“学会”独立停止,偶然发现障碍物,并使用可用的底盘机制确定扰动的大小。
尽管Ortonog设备还不能成为适合实际使用的步行机的基础,但其前景已经很明显。 根据有关该项目工作进展的现有信息,VolSTU和TsKB“Titan”的工作人员设法开发了一种高效的步行推进器,并创建了具有良好前景的控制算法。 根据官方数据,Ortonog汽车可以加速到超过每小时1,6公里的速度。 45 cm中支撑间距的长度和高度允许设备克服高达40-45 cm的障碍物,同时保持框架的水平位置。 对于涉及设备倾斜的更复杂的操纵,障碍物的最大高度增加到80,参见。交叉护城河的最大宽度是0,9仪表。 行走螺旋桨能够克服上升到40°。 当在斜坡上移动时,Ortonog在表面倾斜角度与60°保持稳定。 旋转底盘块允许装置相对于其纵轴以任何角度改变运动方向。 如有必要,可以侧向移动并以半径超过一米的速度转弯。
现在谈论Ortonog项目的前景还为时过早。 该项目和按照它建立的设备纯属实验性质,完全决定了开发组织的未来计划。 在不久的将来,伏尔加格勒技术大学和中央设计局“泰坦”的“理论力学”部门将继续为其开发行走推进和控制系统。 只有在创建了能够确保助行器在各种表面和不同环境中工作的完整算法之后,才有可能开始研究以下实验样本。 下一个项目可用于改进现有的发展及其对实际应用的适应性。 新项目不太可能在不久的将来出现:完成Ortonog设备的工作可能需要几年时间。

在网站的材料上:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/

在最近在伏尔加格勒州立技术大学(VolSTU)举行的V国际科学和实践会议“车辆和系统的进展-2013”期间,来自37国家的活动参与者展示了实验仪器“Ortonog”。 步行机由伏尔加格勒技术大学理论力学系和TsKB Titan的工作人员开发,旨在测试控制系统并展示具有原始正交推进装置的助行器的功能。 值得注意的是,Volgograd Ortonog在一年前首次出现,但这些测试的结果受到控制系统不完善的影响。 从那时起,项目开发人员已经改进了机器单元运行的算法,这导致其特性显着增加。 在Ortonog会议的演示中,他在演示现场周围自由行走,接收来自控制面板的命令。
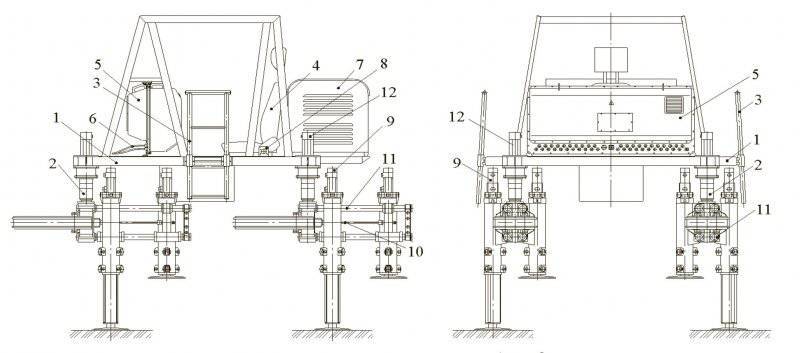
实验机“Ortonog”的设计相对简单,但同时有效。 在设备的框架上安装驾驶室与操作员和控制系统的工作场所。 在它后面安装了一个小型汽油发电机,为步行者提供操作所需的电力。 四个正交步行推进器块固定在框架的下部。 Ortonog汽车的原型上涂有俄罗斯国旗的颜色,除其他外,它还有助于各种单位的视觉识别。 因此,驾驶室元件涂成白色,框架为蓝色,底盘为红色。 重约1200 kg的实验机器的总长度为3,3米,宽度不大于2,2米,高度为2,75米。
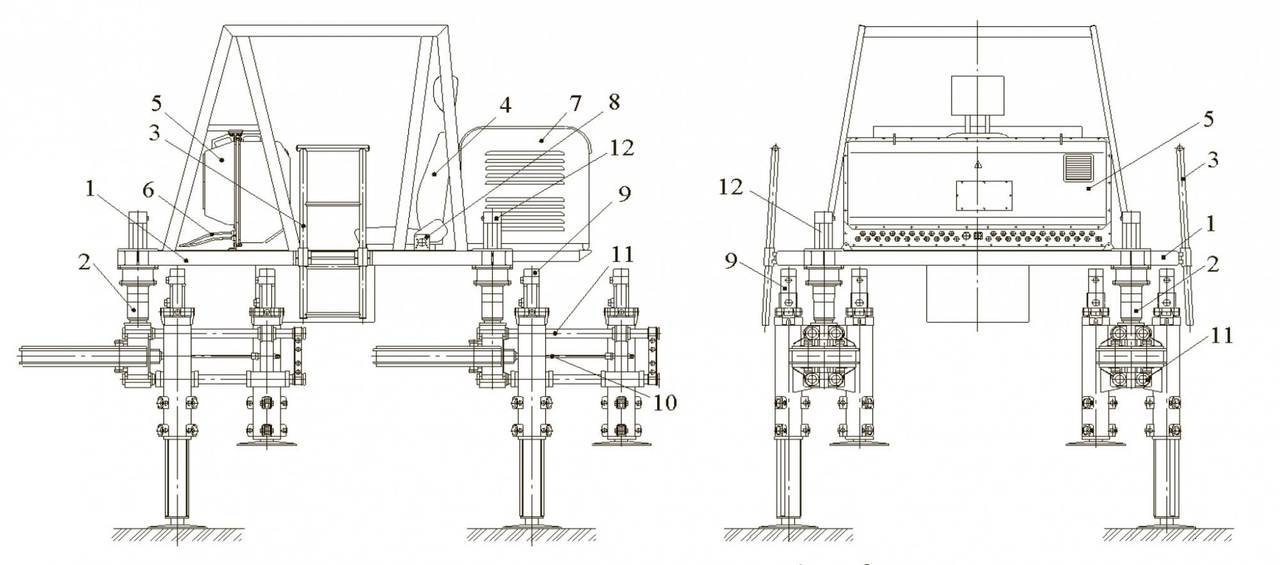
步行结构方案 机器人 “Orthonog”:1 - 帧; 2 - 步行搬运工; 3 - 楼梯; 4 - 操作员座椅; 5 - 电气设备掩体; 6 - 有线网络; 7 - 车载电源; 8 - 面板; 9 - 垂直运动机构; 10 - 水平运动机构; 11 - 指南; 12 - 转向机构
底盘的四个块中的每一个通常被分成三个元件:垂直运动机构,水平运动机构和旋转机构。 前者在其组成中具有电动缸,并且负责升高和降低放置在可伸缩杆上的圆形支撑件。 Ortonog有八个这样的支撑,每个底盘两个。 由导轨和致动器组成的水平运动机构设计成使气缸和杆与支架一起移动。 底盘的每个块都有两组导轨和驱动器,每个导轨和一个驱动器都有一个。 最后,转动齿轮围绕垂直轴展开整个底盘块。 实验机器的整个底盘系统基于电驱动器。
Ortonog助行器在平坦表面上的运动如下。 机器从八个支撑中提升四个(机箱中的每个块一个),并使用水平移动机制将它们向前移动。 此外,支撑物落到表面并且循环重复,但是这次其他四个支撑件上升并向前移动。 在运动过程中,Ortonog使用交替垂直位移驱动,水平机构几乎一直工作。 如有必要,激活旋转机制。 它们的同步或单独操作确保旋转到所需的角度。 从设计中可以看出,实验助行器可以以最小半径轮流。
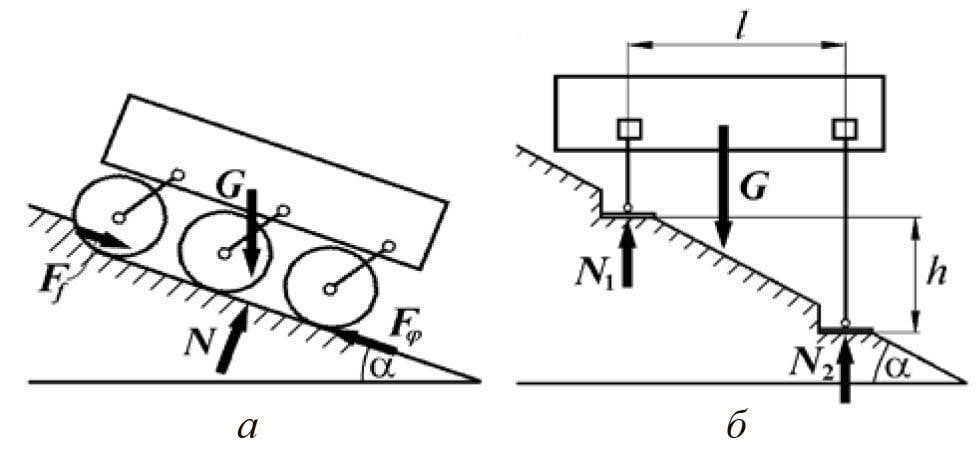
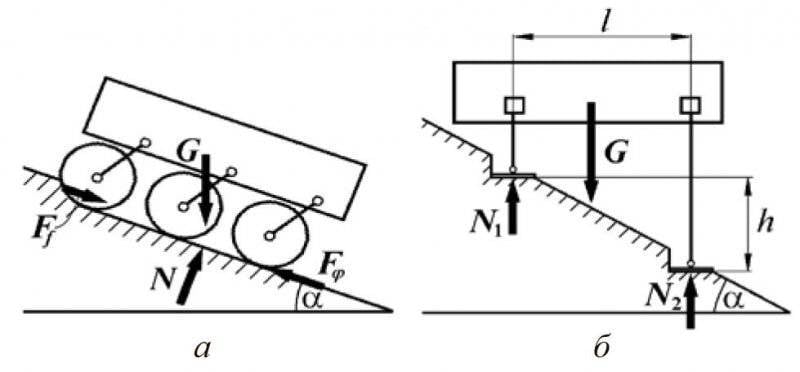
沿着轮式(a)和步行(b)车的斜坡移动
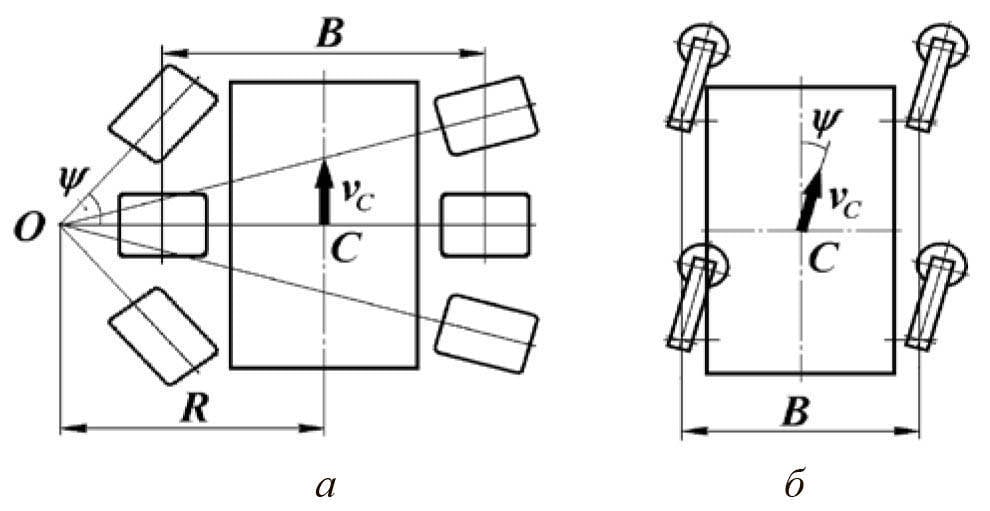
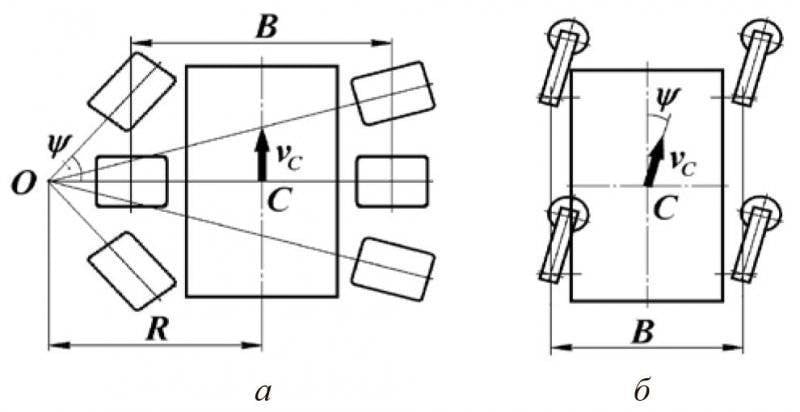
图。 5。 轮式(a)和行走(b)车的旋转方案
所有运行机构都配有传感器,可收集有关其工作的信息。 信息传输到操作员的驾驶员控制台,并且能够调整机器的操作。 Ortonog项目中最大的问题之一是与驾驶员的工作有关。 实践表明,只有在平坦表面上行驶时,人才能有效地操作机器。 如果需要在崎岖的地形上移动等 复杂的路线,操作员不能独立监控所有机制的工作,并在一个时间或另一个时间选择必要的操作算法。 在这方面,与机器的技术部分同时开发了自动控制复合体。
最初,使用以下控制方法来测试实验机器。 复合体的操作者根据视频系统发送的信息控制设备的自主操作。 如有必要,首先,在克服障碍的同时,他干涉并对步行者的工作进行必要的调整。 绝大多数机器控制动作都是通过自动化进行的,无需人工干预。 在这种情况下,实验装置的自动化仅从传感器接收关于系统的操作和机器在空间中的位置的信息。 没有采取任何措施来使用视频信号。 这种收集控制机器所需信息的方法的结果是电子设备不能绕过障碍物的情况,这需要操作员的干预。

这些测试有助于收集设置自适应步行器控制所需的信息。 特殊设备记录了所有操作员的操作,来自传感器的信息,还记录了来自外部和内置摄像机的信号。 将来,所有记录的数据都进行了比较,并选择了与机制的具体行动相对应的数据片段。 该信息用于“学习”自动化。 乍一看测试和微调控制系统的结果似乎不是太高。 然而,已经在去年年底,Ortonog设备能够独立地在没有操作员帮助的情况下沿着直的和倾斜的表面移动并且无论表面的角度如何都保持所需的身体位置。 此外,该单元“学会”独立停止,偶然发现障碍物,并使用可用的底盘机制确定扰动的大小。
尽管Ortonog设备还不能成为适合实际使用的步行机的基础,但其前景已经很明显。 根据有关该项目工作进展的现有信息,VolSTU和TsKB“Titan”的工作人员设法开发了一种高效的步行推进器,并创建了具有良好前景的控制算法。 根据官方数据,Ortonog汽车可以加速到超过每小时1,6公里的速度。 45 cm中支撑间距的长度和高度允许设备克服高达40-45 cm的障碍物,同时保持框架的水平位置。 对于涉及设备倾斜的更复杂的操纵,障碍物的最大高度增加到80,参见。交叉护城河的最大宽度是0,9仪表。 行走螺旋桨能够克服上升到40°。 当在斜坡上移动时,Ortonog在表面倾斜角度与60°保持稳定。 旋转底盘块允许装置相对于其纵轴以任何角度改变运动方向。 如有必要,可以侧向移动并以半径超过一米的速度转弯。
现在谈论Ortonog项目的前景还为时过早。 该项目和按照它建立的设备纯属实验性质,完全决定了开发组织的未来计划。 在不久的将来,伏尔加格勒技术大学和中央设计局“泰坦”的“理论力学”部门将继续为其开发行走推进和控制系统。 只有在创建了能够确保助行器在各种表面和不同环境中工作的完整算法之后,才有可能开始研究以下实验样本。 下一个项目可用于改进现有的发展及其对实际应用的适应性。 新项目不太可能在不久的将来出现:完成Ortonog设备的工作可能需要几年时间。
在网站的材料上:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/
信息