坦克害怕什么?
克服 一个坦克 发明并构造了许多辅助设备和机构-从fascinas(以前是草丛的形式,现在是管道)到坦克装甲摊铺机。 但是,通常来说,这不是在适当的时候。 理想情况下,战车本身应该在没有外部帮助的情况下克服其遇到的障碍。
尾犀牛
克服护城河的问题在1920-1930-ies中尤为重要,因为军事学说为攻坚领域提供了“正面”。 当时的一个典型障碍是一条宽度超过2 m且深度超过1,2 m的梯形沟,坦克无法自行脱落。
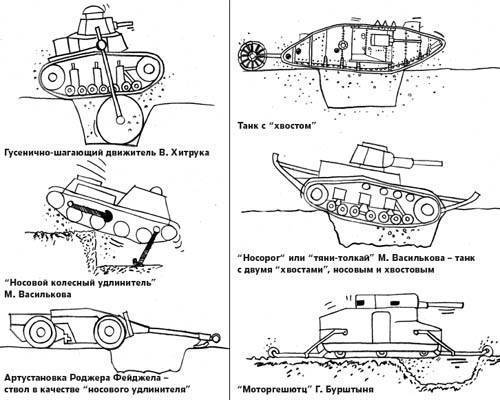
在所有国家,积极开展研究和开发工作以提高履带式车辆的通畅性;提供了大量原创甚至出色的解决方案。 为了不增加作战车辆的长度,作为通常坦克船尾的折衷方案附加了一个可拆卸的“钢尾”尾部,坦克在克服障碍物的同时休息。 在没有钢的需要的情况下,船员可以放下“尾巴”,并且坦克获得了所需的机动自由。
在1929中,设计师M. Vasilkov在T-18前面放置了第二个“尾巴”,取自另一个坦克。 这辆车得到了绰号“犀牛”或“推拉”。 通畅度有所改善,但驾驶员座位的审查变得毫无用处。

Komkor S. Kokhansky支持M. Vasilkov的另一项提议 - “前轮延伸”项目:一个固定在T-18上的导向箭头,带有后轮和线障,并改善了越野沟渠。 该装置的操作原理基于便携式圆柱形fascine(有两种选择:木质和软质 - 用稻草填充的帆布盖)。 当接近护城河时,fascina轮将落在其底部,并且坦克将在其上平稳地滚动到护城河的另一侧。 这使得有可能克服宽达3,5米的沟渠。这个想法意外地得到了红军总参谋部的广泛支持。 两年来,一直有人要求在特定类型的油箱上安装“车轮延伸件”,因此,该设备安装在T-26(CT-26品牌下)上。

腿,滚子,鼻子
回到1911,奥匈帝国铁路团的中尉G. Burshtyn开发了Motorgheshyutts履带式装甲车的设计,带有原装的杠杆滚轮装置。 控制杆在油箱前后均带有滚轮,可以更轻松地克服各种障碍物。
Engineer V. Khitruk建议在履带式底盘上安装行走搬运工。 为此,在底盘的侧面上,在水平轴上,大约在水箱的重心处,连接一对杠杆。 在关闭位置,它们位于水平位置。 当汽车接近坑并击中它时,杠杆转动并靠在障碍物的底部。 结果,坦克实际上是“在手”移动到护城河的另一侧。
1920-s末端的匈牙利人尼古拉斯·斯特劳斯勒(Nicholas Strausler)在英格兰开发了一种用于维克斯坦克的装置,称为“施特劳斯勒腿”。 摆动弹簧支撑增加了坦克的长度,并帮助战争机器爬过沟渠和沟渠,最大宽度为3米,深度达到1,5深度。
还提出了一些克服障碍的异乎寻常的方式 - 例如,使用一桶仪器作为支持。 现代坦克枪管的长度达到了5 - 6米,并且本身就是以某种方式使用这种长管道的想法......在1977中,发明者Roger Fagel申请了一种轮式自行火炮系统专利,该系统可以克服沟渠,将枪管靠在其相对边缘。 为此,在枪管的枪口上进行了特殊的支撑“脚跟”,当越过障碍物时,机器的一部分重量被转移到该枪口上。 降低枪管并将“第五”放在地面上,装甲车几乎增加了其支撑部件的长度两倍,可能会爬到障碍物的另一侧。 枪管起到了机器“鼻子延伸”的作用。 我必须说,工程解决方案出乎意料,但通常是枪械制造商参考行李箱 武器 更仔细......
蚱蜢坦克
但是人们想要一举击败整个敌人的障碍! 在1930-x中,国内设计师开发了一个非常具有革命性的想法 - 根据他们的计划,坦克应该跳过障碍物。 此外,军事理论家认为,未来世界大战中的所有坦克(现在称为第二次世界大战)将飞越障碍路线,实际上是在一次跨越,克服强大的反坦克防御线 - 沟渠,地球仪,龙牙,刺猬和我的场。
红军的油轮练习专门制定了一种战斗技术 - 跳过反坦克障碍。 为此目的,使用了由敌人竖立的方便地形或反陡,或者是在敌人防御区前面专门由工兵创造的跳板。 事实上,典型的1920-1930-x坦克是一种轻快的,虽然装备很弱,装甲较轻的装甲车,但它可以很好地“飞越”障碍物。
此外,在1937中,开发了一种特殊的机器来克服跳跃的障碍。 作为CCI-2(克服障碍物的坦克)的基础,使用了T-26坦克的较轻底盘。 制作跳跃的机制包括四个带有凸耳的偏心(每侧两个)和一个特殊的装置,可以在跳跃时释放它们。 汽车在障碍物前面加速,偏心轮在适当的时刻转动,将坦克扔到空中。 然而,测试表明,机器的速度不足以使跳跃,并且由于刚性悬挂系统,偏心的正常工作被打乱。

极跳
有趣的是,在同一时期,开发了一种完全显着的战斗车辆附件,显着延长了其跳跃并增加了其飞行高度。 在1940,苏联工程师M.M. Botvinnik通过使用动能获得了“适应坦克以实现其跳跃”的版权证书。 为此,为水箱提供了一个特殊的旋转金属U形框架,该框架在水平轴上连接到车身。 在通常的位置,框架被抛回,当接近障碍物(吊杆)时,特殊机构被向前抛出,使得已经分散的坦克用框架抵靠它。 装甲车同时开始沿着圆弧移动,圆弧的半径等于框架的长度,并像跳杆一样跳过障碍物。
框架的焦点可以作为敌人防御线前面特别安排的障碍,以及敌人的障碍本身。 如果在框架上的软土上安装了推土机式止动器,则会啃入地面。 但是,要克服的障碍物的宽度仅等于“杆”的长度,与传统的坦克相比,这几乎没有优势。 为了增加跳跃的长度,发明人为框架配备了强大的弹簧减震器。 在框架撞击障碍物的瞬间,弹簧被压缩并通过特殊的止动器保持在压缩状态,该止动器在适当的时刻释放它。 当弹簧打开时,弹簧向轨道顶部的坦克传递了强大的附加冲量。
结果,战车不是沿着弧线移动,而是沿着抛物线移动,也就是沿着与地平线以一定角度投掷的身体的弹道轨迹! 通过延长飞行路径,显着增加了要克服的障碍物的高度。 着陆后,坦克可以放下框架并继续攻击“光”。 遗憾的是,找不到本发明信息的实际应用。
现代坦克比它们的前辈重得多。 今天,战斗车辆的重量达到60 T,所以不得不放弃急速跳跃。 确实如此,军事展览和沙龙的国内坦克从跳板(反疤痕)跳出壮观的壮观跳跃,但这更有可能证明军事装备的建设性完美性和可靠性,而不是真正的战斗技术。

最容易接近且同时有效的反坦克武器之一仍然是护城河,这是典型的古老障碍,即使在今天也是强大的战车的严重障碍。
尾犀牛
克服护城河的问题在1920-1930-ies中尤为重要,因为军事学说为攻坚领域提供了“正面”。 当时的一个典型障碍是一条宽度超过2 m且深度超过1,2 m的梯形沟,坦克无法自行脱落。
在所有国家,积极开展研究和开发工作以提高履带式车辆的通畅性;提供了大量原创甚至出色的解决方案。 为了不增加作战车辆的长度,作为通常坦克船尾的折衷方案附加了一个可拆卸的“钢尾”尾部,坦克在克服障碍物的同时休息。 在没有钢的需要的情况下,船员可以放下“尾巴”,并且坦克获得了所需的机动自由。
在1929中,设计师M. Vasilkov在T-18前面放置了第二个“尾巴”,取自另一个坦克。 这辆车得到了绰号“犀牛”或“推拉”。 通畅度有所改善,但驾驶员座位的审查变得毫无用处。
回到1930,苏联设计师提出了一个革命性的想法:根据他们的计划,坦克必须简单地跳过障碍物,克服强大的反坦克防线 - 沟渠,地球仪,“龙牙”,“刺猬”和雷区。
Komkor S. Kokhansky支持M. Vasilkov的另一项提议 - “前轮延伸”项目:一个固定在T-18上的导向箭头,带有后轮和线障,并改善了越野沟渠。 该装置的操作原理基于便携式圆柱形fascine(有两种选择:木质和软质 - 用稻草填充的帆布盖)。 当接近护城河时,fascina轮将落在其底部,并且坦克将在其上平稳地滚动到护城河的另一侧。 这使得有可能克服宽达3,5米的沟渠。这个想法意外地得到了红军总参谋部的广泛支持。 两年来,一直有人要求在特定类型的油箱上安装“车轮延伸件”,因此,该设备安装在T-26(CT-26品牌下)上。
腿,滚子,鼻子
回到1911,奥匈帝国铁路团的中尉G. Burshtyn开发了Motorgheshyutts履带式装甲车的设计,带有原装的杠杆滚轮装置。 控制杆在油箱前后均带有滚轮,可以更轻松地克服各种障碍物。
Engineer V. Khitruk建议在履带式底盘上安装行走搬运工。 为此,在底盘的侧面上,在水平轴上,大约在水箱的重心处,连接一对杠杆。 在关闭位置,它们位于水平位置。 当汽车接近坑并击中它时,杠杆转动并靠在障碍物的底部。 结果,坦克实际上是“在手”移动到护城河的另一侧。
1920-s末端的匈牙利人尼古拉斯·斯特劳斯勒(Nicholas Strausler)在英格兰开发了一种用于维克斯坦克的装置,称为“施特劳斯勒腿”。 摆动弹簧支撑增加了坦克的长度,并帮助战争机器爬过沟渠和沟渠,最大宽度为3米,深度达到1,5深度。
还提出了一些克服障碍的异乎寻常的方式 - 例如,使用一桶仪器作为支持。 现代坦克枪管的长度达到了5 - 6米,并且本身就是以某种方式使用这种长管道的想法......在1977中,发明者Roger Fagel申请了一种轮式自行火炮系统专利,该系统可以克服沟渠,将枪管靠在其相对边缘。 为此,在枪管的枪口上进行了特殊的支撑“脚跟”,当越过障碍物时,机器的一部分重量被转移到该枪口上。 降低枪管并将“第五”放在地面上,装甲车几乎增加了其支撑部件的长度两倍,可能会爬到障碍物的另一侧。 枪管起到了机器“鼻子延伸”的作用。 我必须说,工程解决方案出乎意料,但通常是枪械制造商参考行李箱 武器 更仔细......
各种装置改善坦克。
蚱蜢坦克
但是人们想要一举击败整个敌人的障碍! 在1930-x中,国内设计师开发了一个非常具有革命性的想法 - 根据他们的计划,坦克应该跳过障碍物。 此外,军事理论家认为,未来世界大战中的所有坦克(现在称为第二次世界大战)将飞越障碍路线,实际上是在一次跨越,克服强大的反坦克防御线 - 沟渠,地球仪,龙牙,刺猬和我的场。
红军的油轮练习专门制定了一种战斗技术 - 跳过反坦克障碍。 为此目的,使用了由敌人竖立的方便地形或反陡,或者是在敌人防御区前面专门由工兵创造的跳板。 事实上,典型的1920-1930-x坦克是一种轻快的,虽然装备很弱,装甲较轻的装甲车,但它可以很好地“飞越”障碍物。
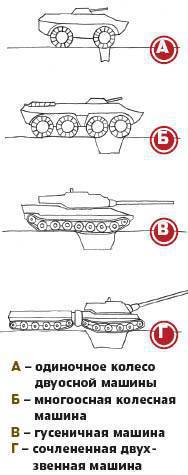
克服不同底盘上的反坦克沟车辆。
此外,在1937中,开发了一种特殊的机器来克服跳跃的障碍。 作为CCI-2(克服障碍物的坦克)的基础,使用了T-26坦克的较轻底盘。 制作跳跃的机制包括四个带有凸耳的偏心(每侧两个)和一个特殊的装置,可以在跳跃时释放它们。 汽车在障碍物前面加速,偏心轮在适当的时刻转动,将坦克扔到空中。 然而,测试表明,机器的速度不足以使跳跃,并且由于刚性悬挂系统,偏心的正常工作被打乱。
即使现代坦克试图在没有训练的情况下克服反击也会发生这种情况。
极跳
有趣的是,在同一时期,开发了一种完全显着的战斗车辆附件,显着延长了其跳跃并增加了其飞行高度。 在1940,苏联工程师M.M. Botvinnik通过使用动能获得了“适应坦克以实现其跳跃”的版权证书。 为此,为水箱提供了一个特殊的旋转金属U形框架,该框架在水平轴上连接到车身。 在通常的位置,框架被抛回,当接近障碍物(吊杆)时,特殊机构被向前抛出,使得已经分散的坦克用框架抵靠它。 装甲车同时开始沿着圆弧移动,圆弧的半径等于框架的长度,并像跳杆一样跳过障碍物。
框架的焦点可以作为敌人防御线前面特别安排的障碍,以及敌人的障碍本身。 如果在框架上的软土上安装了推土机式止动器,则会啃入地面。 但是,要克服的障碍物的宽度仅等于“杆”的长度,与传统的坦克相比,这几乎没有优势。 为了增加跳跃的长度,发明人为框架配备了强大的弹簧减震器。 在框架撞击障碍物的瞬间,弹簧被压缩并通过特殊的止动器保持在压缩状态,该止动器在适当的时刻释放它。 当弹簧打开时,弹簧向轨道顶部的坦克传递了强大的附加冲量。
苏联CCI-2与侧面偏心。 在跳跃的时候,一个特殊的设备释放了怪人,他们转过身,把坦克扔到空中。
结果,战车不是沿着弧线移动,而是沿着抛物线移动,也就是沿着与地平线以一定角度投掷的身体的弹道轨迹! 通过延长飞行路径,显着增加了要克服的障碍物的高度。 着陆后,坦克可以放下框架并继续攻击“光”。 遗憾的是,找不到本发明信息的实际应用。
现代坦克比它们的前辈重得多。 今天,战斗车辆的重量达到60 T,所以不得不放弃急速跳跃。 确实如此,军事展览和沙龙的国内坦克从跳板(反疤痕)跳出壮观的壮观跳跃,但这更有可能证明军事装备的建设性完美性和可靠性,而不是真正的战斗技术。
相位跳槽使用装置MM 鲍特维尼克。
信息