不显眼的甲板无人机
当在西方的试验场上成功演示了最新的无人机无人技术时,在俄罗斯国防部,不受惩罚的盗窃程度已超过数十亿美元。 矛盾的是,但事实是:俄罗斯军事和国防工业的盗窃程度越高,该国军工领导的一些代表心中就越有乐观和决心在突破性的科学技术领域“赶上并超越美国”。关于最新军事技术的发展。

对于美国海军和诺斯罗普·格鲁曼公司而言,2012年底非常成功。 在创建基于UCLASS(无人航母的机载监视和打击)舰载侦察和打击飞机综合体(RUAC)的计划中,下一阶段已经完成,使开发人员更接近于2013年在该航母上对该系统的演示者进行飞行测试的开始。 为此,诺斯罗普·格鲁曼公司开发了X-1B无人机(UAV)的两个原型(AV-2和AV-47),该原型代表了当今最先进的试验性无人机平台,是那些有前途的RUAC的原型,该原型机在10年内可能出现在甲板上 飞机 以美国海军核动力航母为基地的团体。
新的五角大楼无人机
在 90 年代中期,五角大楼开始研究无人机的概念,主要设计用于作战任务。 美国空军和海军已经启动了两个独立的打击乐演示程序。 无人机 类型 UCAV(无人驾驶飞行器)。 波音为空军开发了 X-45 验证机,为海军开发了 舰队 该计划被命名为UCAV-N(海军无人战斗机-海军),诺斯罗普·格鲁曼公司和波音公司在这两个项目中分别进行了X-47飞马和X-46的竞争。 但是,在国防高级研究计划局(DARPA)的领导下,美国国防部于2003年2004月决定将空军和海军的两个概念合并为一个J-UCAS(联合无人作战空中系统)计划。 正在进行的工作的这种合并和转变的目的是需要建立一个通用的进攻系统,在该系统中,航空和地面部分将被改编为执行特殊战斗任务。 然后,在2006年1,45月,DARPA被指示将所有J-UCAS资源的管理权移交给美国空军。 但是,所有的重新安排和转变均未取得积极结果,该方向于XNUMX年关闭。 到那时,研发计划的成本已超过XNUMX亿美元,使其成为五角大楼有史以来最昂贵的无人机之一。
然而,海军没有放弃将新型飞机引入其本已强大的海军航空兵团的组合中的想法,并且在5月,2010向领先的美国国防公司提出了关于UCAV甲板无人机的信息请求,后者被称为UCLASS。 占据美国海军战略家头目的想法如下。 在2018结束时,它采取了一种不引人注目的侦察打击复合体,能够与载人甲板飞机一起作为航空母舰飞机组的一部分进行操作。 拟议的由4到6架无人机组成的RUAC应该与CVN-68尼米兹和杰拉尔德福特CVN-78航空母舰一起自主行动,无需加油11 - 14小时,并且能够补充飞机加油的燃料在系统“软管锥”或“填充杆 - 燃料接收器”。
UCLASS系统的一个重要显着特点是它的任务是在空中防御系统受到良好保护的空域中运行,这意味着与第五代F-35C战斗机的甲板版本相比,无人机应具有较低的雷达可见度。
这个海军概念的发展合同已经交给了Atomix航空系统公司,洛克希德马丁公司和诺思罗普格鲁曼公司。
但现在我们对诺斯罗普格鲁曼公司提出的X-47B概念更感兴趣,因为它的两个示威者已经建成,飞行并准备在核航母哈里杜鲁门上进行试飞。 该公司在8月2007获得了海军的合同,生产了无人作战飞机系统演示器无人机系统(UCAS-D)的模型。 作为两架具有战斗机尺寸的X-47B示范者的开发计划和飞行测试的一部分,将获得必要的经验,计划用于随后的竞争计划,为美国海军创建一个基于甲板的无人驾驶RUAK UCLASS。
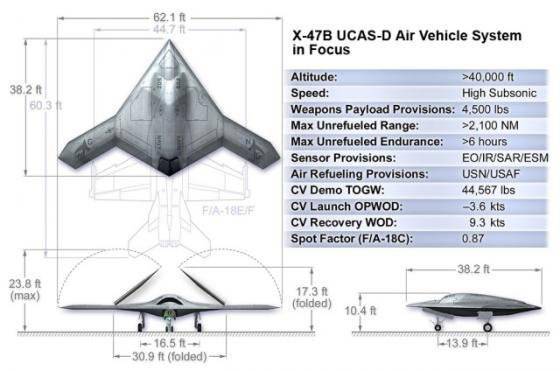
X-47B版本是X-47A UCAV-N设备的改进版本,采用无尾空气动力学设计制造,长度为11米,翼展为18,9米。 结合Pratt&Whitney F100-220U涡轮喷气发动机增加翼展,使模型在空中飞行9小时,并提供2960公里距离。 该装置的三角翼的控制台被折叠,这减小了其尺寸并且在航空母舰上提供了基础。

海洋选择
X-47B首次成功飞行于今年2月2011在美国空军爱德华兹(加利福尼亚州)基地的Dryden飞行试验中心进行,然后在6月2012被送往海军航空站Patuxent River(马里兰州)进行下一阶段的测试。
一个月后,在7月29,那里有第二次飞行。 据海军航空系统司令部报告,无人机示威者从机场起飞并在空中35分钟,达到了海拔2300米和每小时330公里的速度。
这次飞越切萨皮克湾的航班开启了飞行试验计划X-47B,其中必须确认该模型与甲板及其着陆设备上的标准飞行程序的兼容性。 这里的空域允许无人机开发人员在没有任何限制的情况下进行试飞,直到2013年度将航班计划转移到航空母舰。
航空站的其中一个测试综合体模拟了航空母舰的状况,并允许开发人员验证无人机是否准备好在海上进行测试,特别是在弹射器和准确进近的帮助下测试起飞的可能性,并使用航空整理器着陆,直到执行甲板上的实际测试。
今年11月底,X-47B的第一次发射是在Patuxent河上使用沿海陆基蒸汽弹射器进行的,之后该设备在切萨皮克湾上空进行了试飞。 飞行任务提供了在所需滑翔路径上降落在航空母舰甲板上时执行模拟无人机飞行计划的若干机动。 根据Northrop Grumman的UCAS-D演示器的飞行测试主管Darel Martis的说法,这次发射是测试程序中非常重要的一步,因为能够使用无线CDU(远程控制单元)精确控制设备,将在X-47B的未来运营中发挥重要作用。 这些行动包括无人机的滑行,其向甲板弹射器的移动以及与其的连接,在着陆后从机翼飞行器脱开并从着陆甲板快速离开。
在原子航空母舰CVN-47 Harry Harman上发射第二架X-75B无人机演示器之前,海军专家和Northrop Grumman开发公司的合并团队将在接下来的几周内继续陆地飞行。 这些工程将在年底前进行,并且在2013中,计划从甲板开始飞行,在2014年度继续进行飞行测试,使用AAR程序(自主空气加油)使用加油杆和锥体在空中自动加油X-47B。
在该计划的过程中,将不断测试随后创建低调无人甲板RUAK所需的技术。 通过2020,海军计划开始在第一个侦察机无人机中队的航母上运行,其尺寸为甲板战斗机。
在X-47B演示器的12月甲板测试的初始阶段,计划验证设备与基于航空母舰的飞机组进行的标准操作的兼容性。 为此,该船配备了适当的设备和软件。 根据美国海军航空系统指挥计划,无人机将在航空母舰的甲板上进行各种滑行以及其他操作。
计划于47年度进行的X-2013B飞行演示测试包括UCAS-D演示器在航空母舰甲板上起降,将车辆定位在由飞机空中交通管制服务控制的空域内,并使用该模型进行其他常规操作。
作为UCAS-D计划的一部分,计划通过2013测试X-47B自主显示器是否可以安全地从航空母舰上运行,包括起飞和着陆,之后它将在2014-m中进行空中自动加油。
在海上试航的预期中,开发人员使用无线手持显示设备 CDU(控制显示单元)测试了船舶甲板上设备的控制,这将允许操作员通过远程控制在航空母舰上操纵无人机. 这项工作于 XNUMX 月初在美国海军航空站 Patuxent River 进行,并展示了通过无线控制在满是其他飞机的甲板上安全操纵该设备的能力。 测试程序提供了控制无人机发动机的推力、执行地面滑行、将设备退出到弹射器并与其连接以及移动 无人机 着陆完成后的模拟着陆区。
当执行操作以使用CDU装置改变其在船上的位置时,甲板操作员X-47B将与航空母舰的驾驶舱的头部串联工作。 飞行领导者将使用传统的手动命令来显示该装置如何沿着甲板移动。 具有控制装置的操作员计划在飞行指引仪后面并使用CDU复制手动命令并通过无线链路以数字形式将它们发送到UAV。
X-47B应该在空中执行的其他任务也正在成功开发。 特别是,进行了一系列飞行试验,以展示在执行侦察或打击行动时可以帮助增加未来无人机甲板无人机飞行范围和持续时间的技术。
这些测试证明了所创建的硬件和软件的功能,可以帮助X-47B在2014年度在AAR(自主空中加油)的空气中进行自动加油。 正如Northrop Grumman公司报道的那样,在AAR计划的飞行测试中,X-47B无人机BLAH的功能由其模拟器--Kalspan公司的飞机“Lidzhet”执行。 欧米茄Air Reefwell公司的飞机K707被用作油轮。 用美国海军和空军使用的两种方法证明了加油的可能性。 在第一种情况下,它是一个“软管锥”系统,在第二种情况下,使用燃料棒接收来自其他设备的燃料。 在试验中,没有进行飞机之间空气中燃料的转移。
在“Lirjet”上安装了导航系统,飞行控制系统处理器和前半球检查系统的功能等同物,X-47B将在空中进行加油操作时使用。 飞机没有加注颈部或接收器。 K707几乎与美国空军KC-135飞机相同,并配备了填充锥。
在空中加油的每个训练课程中,“Lidzhet”无人机的模拟器被移除以从油轮移除大约1,6公里。 然后,飞行员将飞机的控制权从X-47B转移到机载处理器,在测试期间提供自动飞行控制和控制飞机模拟器。
在定期“加油”操作期间,K707上的操作员或地面上的飞行领导员在空中加油时通过每个主要位置向“Lirjet”发出命令:在加油时监视油轮后面的接触位置,加油后的位置。
在X-47B上,混合卫星视觉导航系统将与自动飞行控制系统结合使用,该系统将允许确定并精确地保持油轮和正在加油的单元之间的距离。
当飞行测试中测试的X-47B硬件和软件准备就绪时,诺斯罗普格鲁曼和海军计划使用同一架飞机对AAR计划进行额外测试。

欧洲等价物
在美国制造无人机无人机计划的实施正受到欧洲主要航空航天公司的监督。 欧洲没有人希望美国能够在未来的军事冲突中创造出最新的技术。 目前,法国和德国的国防工业正试图阻止购买美国鼓MQ-9“开膛手”(Reaper)公司的“通用原子公司”(General Atomics)。 这两个欧洲国家正在考虑联合收购这一模型以供进一步联合使用。 然而,用于购买美国无人机的可用资金很可能会从计划中撤出,以资助欧洲无人机的发展,这将使其陷入困境。 向各国政府展示军用无人驾驶车辆领域类似技术的准备情况,以及对法国和德国的军事政治领导施加压力,12月1 2012年度法国国家试验场上期待已久的欧洲攻击UAV Neuron示威者首次飞行。
该计划的主要承包商,法国飞机制造公司Dassault Aviation(Dassault Aviation)以及来自五个欧洲国家的一组分包公司,希望Neuron的首次飞行将成为一种催化剂,并将迫使参与该项目的各国政府共同努力和协调他们在开发自己的无人驾驶车辆时的行动。 朝这个方向迈出的第一步可能是决定建立一个新模型Neuron-2,它将具有更先进的配置,并允许对预期攻击无人机的能力进行密集的部队测试。
除了神经元计划,达索航空公司还将与英国BAE系统公司(BAE系统公司)合作,探索创造有前景的英法战斗无人机以及MALE型中长无人机的可能性(中高海拔长航时) )。
神经元无人机执行了第一次持续25分钟的飞行,其中评估了以下基本步骤:沿着跑道自动滑行车辆,将其保持在跑道中间,起飞,着陆和着陆,沿着车道高速行驶,在各种转弯,攀爬,轻柔潜水的空中表现。 测试是在可能的飞行状态范围内进行的,装置的速度达到每小时277公里,高度 - 610米。
现在,该模型计划被转移到法国DGA军备总代表团的武器系统电子中心(电子中心)进行为期四个月的研究,对其各种电磁波谱范围(雷达,红外线,紫外线,光学等)进行掩模识别。在一个特殊的消声室。 完成这项工作后,无人机将返回伊斯特尔,四月2013将开始其飞行测试计划,该计划将在2014中间以内部武器舱内的制导炸弹投放结束。 计划在模拟战斗场景中进行轰炸,对地面目标进行检测,识别和捕获,以配合光学电子和红外板载无人机传感器。 该装置不仅准备在法国进行测试,而且还准备在瑞典和意大利进行测试,每次测试地点在与国家防空系统和其他武器系统一起工作时,将测量其在不同电磁频谱范围内的能见度。 总的来说,在飞行测试期间,神经元无人机将执行大约一百次飞行,每次飞行至少持续一小时。
神经元无人机技术演示技术创建计划在2003宣布,相应的合同价值约为400百万欧元在2005结束时发布。 其中大约一半来自法国(Dassault Aviation和Thales),其余资金分配给其他项目参与者:希腊(HAI),意大利(Alenia Aermacchi),瑞典(SAAB),西班牙(EADS-CASA),瑞士(RUAG)。
对该计划实施的控制权交给法国DGA军备总局,主要承包商是达索航空公司,该公司直接与其工业合作伙伴进行分包。 工作安排不提供重复,合同工程旨在仅使用已经在计划参与者的科学和技术储备中的那些技术诀窍,而不是有希望的发展。 专家指出,这种方法对于欧洲联合计划来说基本上是新的,并确保项目实施期间的财务和技术纪律。
与大多数已经投入使用的其他无人机不同,神经元不是遥控车辆,而是执行预编程任务而无需从地面输入任何其他命令。 地面操作员的作用是观察飞行的进度并确认每个成功的阶段,尽管如果有必要,它可以进入命令循环并控制。
完全自主的无人机飞行被项目参与者视为战斗条件下的最佳状态,因为这将使战斗无人机能够执行任务,即使命令数据线被强烈干扰禁用也是如此。 在远程控制的飞机型RPV(远程驾驶车辆)的情况下,它们被编程为在飞行控制通道失效的情况下在撞击地面时进行垂直俯冲和破坏。
“神经元”的质量:干 - 五,有效载荷 - 两个(燃料和武器)和最大起飞 - 七吨。 该设备可以在空中大约三个小时,以对应于数量M = 0,8的速度飞行,高度可达3000米。
关于无人机的可见度,达索航空的官方代表将其与繁荣进行了比较,并指出在下一个18测试月份期间将从不同角度探索有效散布表面的大小。
阅读更多:http://vpk-news.ru/articles/13673

对于美国海军和诺斯罗普·格鲁曼公司而言,2012年底非常成功。 在创建基于UCLASS(无人航母的机载监视和打击)舰载侦察和打击飞机综合体(RUAC)的计划中,下一阶段已经完成,使开发人员更接近于2013年在该航母上对该系统的演示者进行飞行测试的开始。 为此,诺斯罗普·格鲁曼公司开发了X-1B无人机(UAV)的两个原型(AV-2和AV-47),该原型代表了当今最先进的试验性无人机平台,是那些有前途的RUAC的原型,该原型机在10年内可能出现在甲板上 飞机 以美国海军核动力航母为基地的团体。
新的五角大楼无人机
在 90 年代中期,五角大楼开始研究无人机的概念,主要设计用于作战任务。 美国空军和海军已经启动了两个独立的打击乐演示程序。 无人机 类型 UCAV(无人驾驶飞行器)。 波音为空军开发了 X-45 验证机,为海军开发了 舰队 该计划被命名为UCAV-N(海军无人战斗机-海军),诺斯罗普·格鲁曼公司和波音公司在这两个项目中分别进行了X-47飞马和X-46的竞争。 但是,在国防高级研究计划局(DARPA)的领导下,美国国防部于2003年2004月决定将空军和海军的两个概念合并为一个J-UCAS(联合无人作战空中系统)计划。 正在进行的工作的这种合并和转变的目的是需要建立一个通用的进攻系统,在该系统中,航空和地面部分将被改编为执行特殊战斗任务。 然后,在2006年1,45月,DARPA被指示将所有J-UCAS资源的管理权移交给美国空军。 但是,所有的重新安排和转变均未取得积极结果,该方向于XNUMX年关闭。 到那时,研发计划的成本已超过XNUMX亿美元,使其成为五角大楼有史以来最昂贵的无人机之一。
然而,海军没有放弃将新型飞机引入其本已强大的海军航空兵团的组合中的想法,并且在5月,2010向领先的美国国防公司提出了关于UCAV甲板无人机的信息请求,后者被称为UCLASS。 占据美国海军战略家头目的想法如下。 在2018结束时,它采取了一种不引人注目的侦察打击复合体,能够与载人甲板飞机一起作为航空母舰飞机组的一部分进行操作。 拟议的由4到6架无人机组成的RUAC应该与CVN-68尼米兹和杰拉尔德福特CVN-78航空母舰一起自主行动,无需加油11 - 14小时,并且能够补充飞机加油的燃料在系统“软管锥”或“填充杆 - 燃料接收器”。
UCLASS系统的一个重要显着特点是它的任务是在空中防御系统受到良好保护的空域中运行,这意味着与第五代F-35C战斗机的甲板版本相比,无人机应具有较低的雷达可见度。
这个海军概念的发展合同已经交给了Atomix航空系统公司,洛克希德马丁公司和诺思罗普格鲁曼公司。
但现在我们对诺斯罗普格鲁曼公司提出的X-47B概念更感兴趣,因为它的两个示威者已经建成,飞行并准备在核航母哈里杜鲁门上进行试飞。 该公司在8月2007获得了海军的合同,生产了无人作战飞机系统演示器无人机系统(UCAS-D)的模型。 作为两架具有战斗机尺寸的X-47B示范者的开发计划和飞行测试的一部分,将获得必要的经验,计划用于随后的竞争计划,为美国海军创建一个基于甲板的无人驾驶RUAK UCLASS。
X-47B版本是X-47A UCAV-N设备的改进版本,采用无尾空气动力学设计制造,长度为11米,翼展为18,9米。 结合Pratt&Whitney F100-220U涡轮喷气发动机增加翼展,使模型在空中飞行9小时,并提供2960公里距离。 该装置的三角翼的控制台被折叠,这减小了其尺寸并且在航空母舰上提供了基础。
海洋选择
X-47B首次成功飞行于今年2月2011在美国空军爱德华兹(加利福尼亚州)基地的Dryden飞行试验中心进行,然后在6月2012被送往海军航空站Patuxent River(马里兰州)进行下一阶段的测试。
一个月后,在7月29,那里有第二次飞行。 据海军航空系统司令部报告,无人机示威者从机场起飞并在空中35分钟,达到了海拔2300米和每小时330公里的速度。
这次飞越切萨皮克湾的航班开启了飞行试验计划X-47B,其中必须确认该模型与甲板及其着陆设备上的标准飞行程序的兼容性。 这里的空域允许无人机开发人员在没有任何限制的情况下进行试飞,直到2013年度将航班计划转移到航空母舰。
航空站的其中一个测试综合体模拟了航空母舰的状况,并允许开发人员验证无人机是否准备好在海上进行测试,特别是在弹射器和准确进近的帮助下测试起飞的可能性,并使用航空整理器着陆,直到执行甲板上的实际测试。
今年11月底,X-47B的第一次发射是在Patuxent河上使用沿海陆基蒸汽弹射器进行的,之后该设备在切萨皮克湾上空进行了试飞。 飞行任务提供了在所需滑翔路径上降落在航空母舰甲板上时执行模拟无人机飞行计划的若干机动。 根据Northrop Grumman的UCAS-D演示器的飞行测试主管Darel Martis的说法,这次发射是测试程序中非常重要的一步,因为能够使用无线CDU(远程控制单元)精确控制设备,将在X-47B的未来运营中发挥重要作用。 这些行动包括无人机的滑行,其向甲板弹射器的移动以及与其的连接,在着陆后从机翼飞行器脱开并从着陆甲板快速离开。
在原子航空母舰CVN-47 Harry Harman上发射第二架X-75B无人机演示器之前,海军专家和Northrop Grumman开发公司的合并团队将在接下来的几周内继续陆地飞行。 这些工程将在年底前进行,并且在2013中,计划从甲板开始飞行,在2014年度继续进行飞行测试,使用AAR程序(自主空气加油)使用加油杆和锥体在空中自动加油X-47B。
在该计划的过程中,将不断测试随后创建低调无人甲板RUAK所需的技术。 通过2020,海军计划开始在第一个侦察机无人机中队的航母上运行,其尺寸为甲板战斗机。
在X-47B演示器的12月甲板测试的初始阶段,计划验证设备与基于航空母舰的飞机组进行的标准操作的兼容性。 为此,该船配备了适当的设备和软件。 根据美国海军航空系统指挥计划,无人机将在航空母舰的甲板上进行各种滑行以及其他操作。
计划于47年度进行的X-2013B飞行演示测试包括UCAS-D演示器在航空母舰甲板上起降,将车辆定位在由飞机空中交通管制服务控制的空域内,并使用该模型进行其他常规操作。
作为UCAS-D计划的一部分,计划通过2013测试X-47B自主显示器是否可以安全地从航空母舰上运行,包括起飞和着陆,之后它将在2014-m中进行空中自动加油。
在海上试航的预期中,开发人员使用无线手持显示设备 CDU(控制显示单元)测试了船舶甲板上设备的控制,这将允许操作员通过远程控制在航空母舰上操纵无人机. 这项工作于 XNUMX 月初在美国海军航空站 Patuxent River 进行,并展示了通过无线控制在满是其他飞机的甲板上安全操纵该设备的能力。 测试程序提供了控制无人机发动机的推力、执行地面滑行、将设备退出到弹射器并与其连接以及移动 无人机 着陆完成后的模拟着陆区。
当执行操作以使用CDU装置改变其在船上的位置时,甲板操作员X-47B将与航空母舰的驾驶舱的头部串联工作。 飞行领导者将使用传统的手动命令来显示该装置如何沿着甲板移动。 具有控制装置的操作员计划在飞行指引仪后面并使用CDU复制手动命令并通过无线链路以数字形式将它们发送到UAV。
X-47B应该在空中执行的其他任务也正在成功开发。 特别是,进行了一系列飞行试验,以展示在执行侦察或打击行动时可以帮助增加未来无人机甲板无人机飞行范围和持续时间的技术。
这些测试证明了所创建的硬件和软件的功能,可以帮助X-47B在2014年度在AAR(自主空中加油)的空气中进行自动加油。 正如Northrop Grumman公司报道的那样,在AAR计划的飞行测试中,X-47B无人机BLAH的功能由其模拟器--Kalspan公司的飞机“Lidzhet”执行。 欧米茄Air Reefwell公司的飞机K707被用作油轮。 用美国海军和空军使用的两种方法证明了加油的可能性。 在第一种情况下,它是一个“软管锥”系统,在第二种情况下,使用燃料棒接收来自其他设备的燃料。 在试验中,没有进行飞机之间空气中燃料的转移。
在“Lirjet”上安装了导航系统,飞行控制系统处理器和前半球检查系统的功能等同物,X-47B将在空中进行加油操作时使用。 飞机没有加注颈部或接收器。 K707几乎与美国空军KC-135飞机相同,并配备了填充锥。
在空中加油的每个训练课程中,“Lidzhet”无人机的模拟器被移除以从油轮移除大约1,6公里。 然后,飞行员将飞机的控制权从X-47B转移到机载处理器,在测试期间提供自动飞行控制和控制飞机模拟器。
在定期“加油”操作期间,K707上的操作员或地面上的飞行领导员在空中加油时通过每个主要位置向“Lirjet”发出命令:在加油时监视油轮后面的接触位置,加油后的位置。
在X-47B上,混合卫星视觉导航系统将与自动飞行控制系统结合使用,该系统将允许确定并精确地保持油轮和正在加油的单元之间的距离。
当飞行测试中测试的X-47B硬件和软件准备就绪时,诺斯罗普格鲁曼和海军计划使用同一架飞机对AAR计划进行额外测试。
欧洲等价物
在美国制造无人机无人机计划的实施正受到欧洲主要航空航天公司的监督。 欧洲没有人希望美国能够在未来的军事冲突中创造出最新的技术。 目前,法国和德国的国防工业正试图阻止购买美国鼓MQ-9“开膛手”(Reaper)公司的“通用原子公司”(General Atomics)。 这两个欧洲国家正在考虑联合收购这一模型以供进一步联合使用。 然而,用于购买美国无人机的可用资金很可能会从计划中撤出,以资助欧洲无人机的发展,这将使其陷入困境。 向各国政府展示军用无人驾驶车辆领域类似技术的准备情况,以及对法国和德国的军事政治领导施加压力,12月1 2012年度法国国家试验场上期待已久的欧洲攻击UAV Neuron示威者首次飞行。
该计划的主要承包商,法国飞机制造公司Dassault Aviation(Dassault Aviation)以及来自五个欧洲国家的一组分包公司,希望Neuron的首次飞行将成为一种催化剂,并将迫使参与该项目的各国政府共同努力和协调他们在开发自己的无人驾驶车辆时的行动。 朝这个方向迈出的第一步可能是决定建立一个新模型Neuron-2,它将具有更先进的配置,并允许对预期攻击无人机的能力进行密集的部队测试。
除了神经元计划,达索航空公司还将与英国BAE系统公司(BAE系统公司)合作,探索创造有前景的英法战斗无人机以及MALE型中长无人机的可能性(中高海拔长航时) )。
神经元无人机执行了第一次持续25分钟的飞行,其中评估了以下基本步骤:沿着跑道自动滑行车辆,将其保持在跑道中间,起飞,着陆和着陆,沿着车道高速行驶,在各种转弯,攀爬,轻柔潜水的空中表现。 测试是在可能的飞行状态范围内进行的,装置的速度达到每小时277公里,高度 - 610米。
现在,该模型计划被转移到法国DGA军备总代表团的武器系统电子中心(电子中心)进行为期四个月的研究,对其各种电磁波谱范围(雷达,红外线,紫外线,光学等)进行掩模识别。在一个特殊的消声室。 完成这项工作后,无人机将返回伊斯特尔,四月2013将开始其飞行测试计划,该计划将在2014中间以内部武器舱内的制导炸弹投放结束。 计划在模拟战斗场景中进行轰炸,对地面目标进行检测,识别和捕获,以配合光学电子和红外板载无人机传感器。 该装置不仅准备在法国进行测试,而且还准备在瑞典和意大利进行测试,每次测试地点在与国家防空系统和其他武器系统一起工作时,将测量其在不同电磁频谱范围内的能见度。 总的来说,在飞行测试期间,神经元无人机将执行大约一百次飞行,每次飞行至少持续一小时。
神经元无人机技术演示技术创建计划在2003宣布,相应的合同价值约为400百万欧元在2005结束时发布。 其中大约一半来自法国(Dassault Aviation和Thales),其余资金分配给其他项目参与者:希腊(HAI),意大利(Alenia Aermacchi),瑞典(SAAB),西班牙(EADS-CASA),瑞士(RUAG)。
对该计划实施的控制权交给法国DGA军备总局,主要承包商是达索航空公司,该公司直接与其工业合作伙伴进行分包。 工作安排不提供重复,合同工程旨在仅使用已经在计划参与者的科学和技术储备中的那些技术诀窍,而不是有希望的发展。 专家指出,这种方法对于欧洲联合计划来说基本上是新的,并确保项目实施期间的财务和技术纪律。
与大多数已经投入使用的其他无人机不同,神经元不是遥控车辆,而是执行预编程任务而无需从地面输入任何其他命令。 地面操作员的作用是观察飞行的进度并确认每个成功的阶段,尽管如果有必要,它可以进入命令循环并控制。
完全自主的无人机飞行被项目参与者视为战斗条件下的最佳状态,因为这将使战斗无人机能够执行任务,即使命令数据线被强烈干扰禁用也是如此。 在远程控制的飞机型RPV(远程驾驶车辆)的情况下,它们被编程为在飞行控制通道失效的情况下在撞击地面时进行垂直俯冲和破坏。
“神经元”的质量:干 - 五,有效载荷 - 两个(燃料和武器)和最大起飞 - 七吨。 该设备可以在空中大约三个小时,以对应于数量M = 0,8的速度飞行,高度可达3000米。
关于无人机的可见度,达索航空的官方代表将其与繁荣进行了比较,并指出在下一个18测试月份期间将从不同角度探索有效散布表面的大小。
阅读更多:http://vpk-news.ru/articles/13673
信息