无人机的声谱

互联网上充斥着四轴飞行器的嗡嗡声、接近天竺葵的嚎叫声以及奥兰斯的嘎嘎声的录音。这些录音以压缩的 MP3 或类似格式制作,可能会因数据压缩而丢失一些细节,但出于简单参考目的,它们非常合适。
让我们从录制四轴飞行器开始
时间表示中的记录信号(这是可以在示波器上看到的)看起来一如既往地不清楚。
在较高的放大倍数下,可以追踪到整体振幅的不稳定周期性。

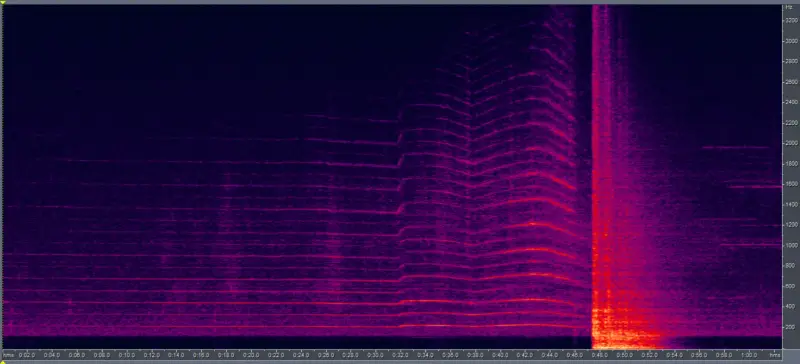
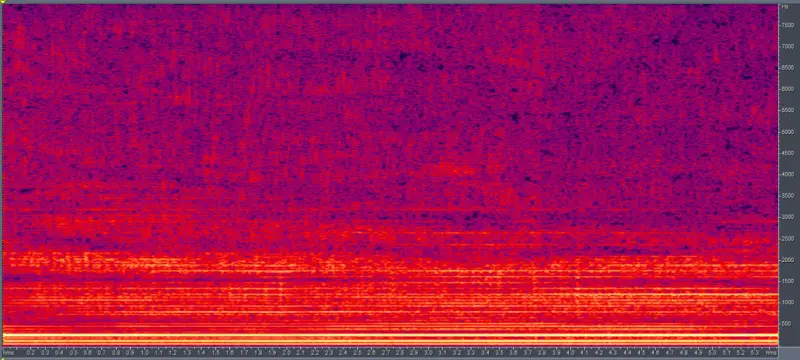
但为了了解里面的内容,您需要查看光谱图像。一般来说,它看起来像这样。
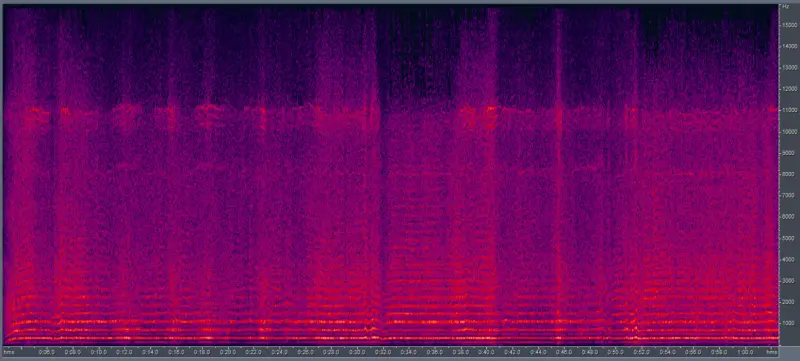
水平是时间,垂直是频率,亮度是给定时刻给定频率的信号幅度。
在这里我们看到一堆等距的平行线。这些是音频信号的谐波。此类信号中它们之间的距离称为基音。显然,主要基调是发动机转速和螺旋桨叶片数量的某种乘积,可能对相邻螺旋桨叶片的相互作用产生额外影响。您可以看到发动机转速在操纵过程中如何变化。
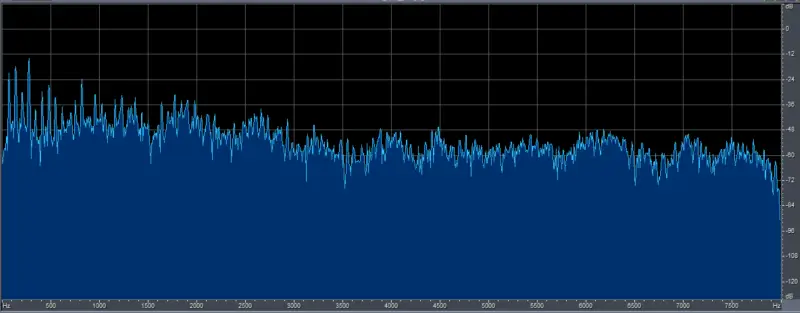
如果我们制作频谱图的切片,那么在单独的部分中我们可以看到以下内容。
这里有一些含糊之处。要么在左侧这里明显分为偶次谐波和奇次谐波,要么来自分谐波的东西已经出现在那里。
可以引入进一步的频谱分析来提高和降低频率分辨率。在第一种情况下,这将为我们提供更好的频率分辨率,但代价是时间分辨率。反向动作也很有价值。随着频率分辨率的提高,可以看出,在操纵直升机时,这是如何由于发动机速度的不平衡而实现的,这表现为频带的分裂。
通过降低频率分辨率,我们可以清楚地看到时间细节。
可以看出,谐波的幅度发生了闪烁。
“天竺葵”的声学痕迹
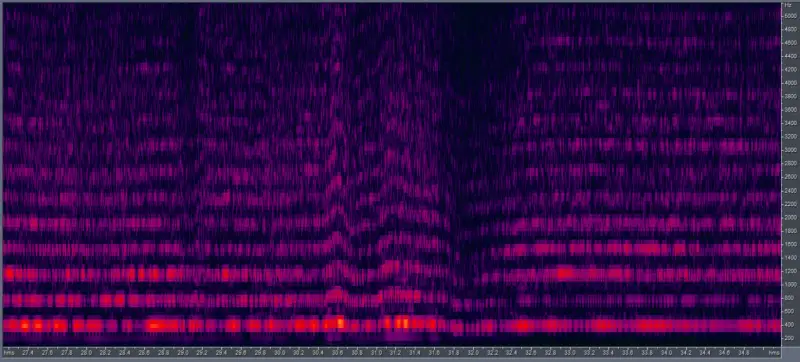
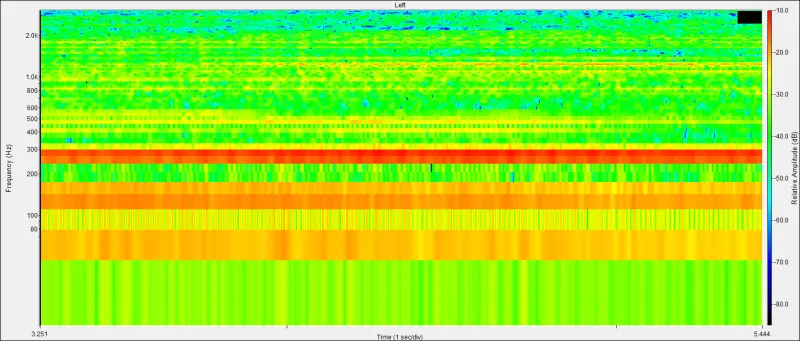
在这里,我们看到了接近和最终峰值的高频分辨率频谱图 无人机.
图中有很多有趣的东西。
首先,频谱棒之间的距离为 113 Hz(在下潜部分之前),并且由于手机麦克风信号被过滤,基波谐波频谱棒不可见。该频率是发动机转速、气缸数量、排气相位分布系数和发动机时钟频率的乘积。
值得注意的是,偶次谐波的幅度大于奇次谐波的幅度。
对于那些有电子学经验的人来说,应该清楚哪些周期信号会在偶次谐波下产生浪涌。
随着时间分辨率的增加(和频率分辨率的降低),很明显
谐波幅度不稳定。
如果我们必须检测这种无人机的接近,那么就必须在频谱的低频部分进行,因为发动机声谱的主要能量集中在那里。我们的耳朵对频谱的低频部分极其不敏感。显然,我们的麦克风也不是为在接近次声的区域中工作的高参数而设计的。
同时,这些频率的声音衰减最小,并且可以长距离传播(大象和鲸鱼深知这一点)。
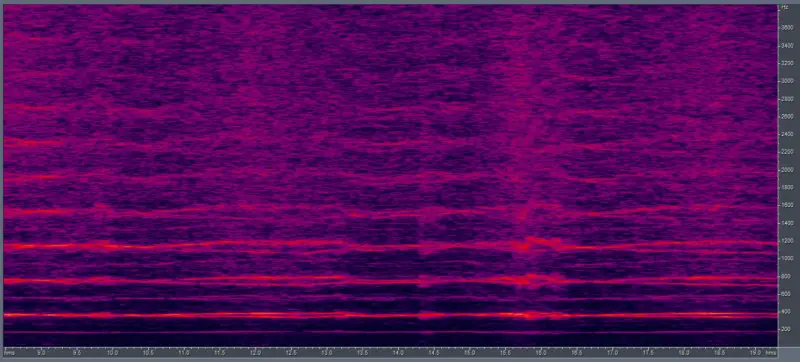
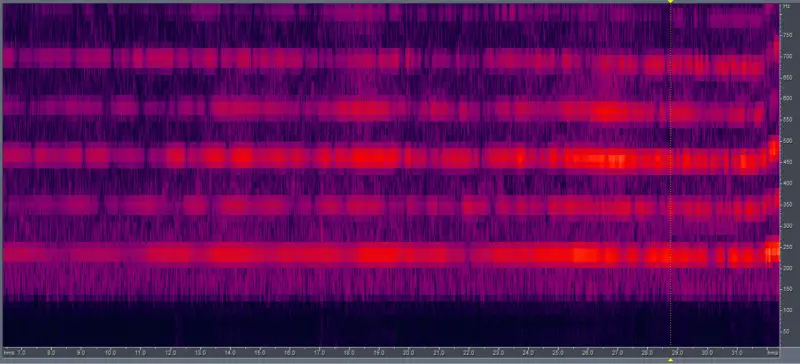
好吧,现在我们来看看“奥兰”
在这里,基音的偶次谐波也很突出,在本例中为 68 Hz。它们比偶数稍大,至少在较低频率范围内是这样。
这里相当丰富的频谱是因为记录是在无人机在森林的某个边缘起飞之前进行的,距离很短。光谱的整个上部还没有时间蒸发。
该记录的值是一次谐波尚未被滤波去除。
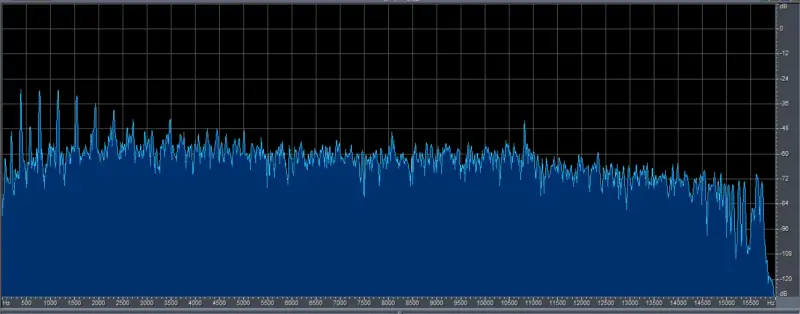
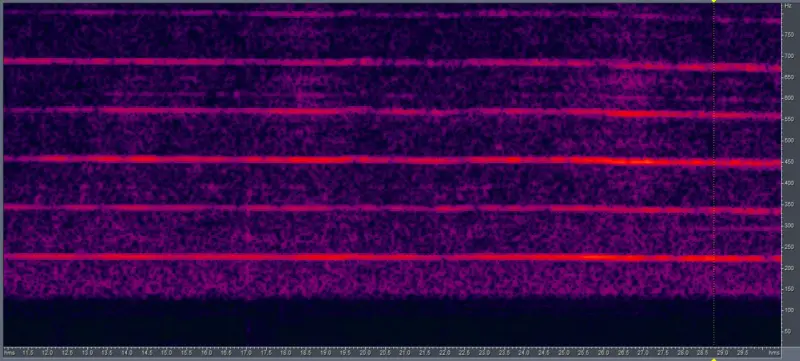
使用对数频率标度,可以识别频谱的最低部分。
这里,一次谐波 (68 Hz) 幅度的波动可以通过无人机发动机速度控制器的操作来解释。
一些结论
1. 通过无人机发出的声音来检测无人机的通过的想法已经存在了相当长的时间。最近有报道称,乌克兰这样一个由8部手机组成的网络已经建成并正在运行。乌克兰网络没有进入俄罗斯领土这一事实远非事实。我们乌克兰的特别激烈的熨烫时刻 航空业 例如,我可以通过夜间或早晨重型飞机的噪音来判断。
尽管我对计算机或智能手机的抵御黑客攻击不抱任何幻想,但在 Google Play 级别的智能手机中插入特定代码是可能的。例如,流行的语音信使中提供了初始声学处理的所有基本元素。如果我们将自己限制在高达 1,5-2 kHz 的有限频率范围内进行持续处理,这甚至不会对处理器产生显着的负载。
2.除了侦查敌人的任务外 无人机,减少无人机的声学特征的相反目标也是可能的。例如,在电子学中,当无法降低谱线的振幅时,您可以尝试涂抹它并降低进行接合的属性。
3. 从上述所有事情中能得到什么,很大程度上取决于那些愿意这样做的人。我之所以提到这一点,是因为从1983年到2012年,我在研究机构和设计局工作,见识够了那里的现实,当地公众原始而愚蠢地审查着预算。
现在我在一家大型私营公司工作。有时,这个庞然大物——我们的公司——会卷入非常重要的技术问题……在这些时刻,显然开始感觉时间在流逝。在解决如此复杂问题的第一阶段,相关专家眼中的恐惧清晰可见……
但正是这样的任务,给那些能够快速、高效、高质量解决问题的人提供了绝佳的机会。
信息