ACTUV - 无人机器人狩猎潜艇探测

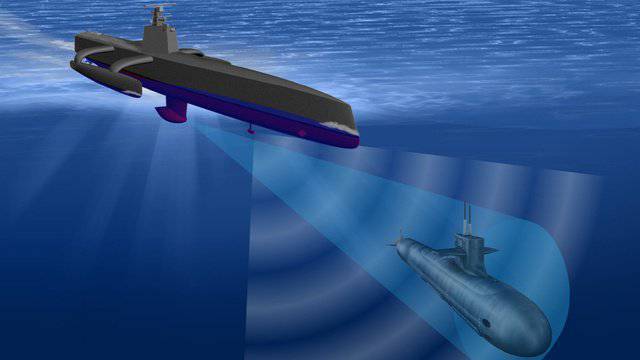
ACTUV是一个现代美国无人系统项目,旨在探测和跟踪敌方潜艇。 这艘船的开发是在国防科学机构DARPA的命令下进行的。 ACTUV(反潜战连续小径无人艇)将使用主动回声定位来探测敌方潜艇。 假设法院数据不会收到任何费用 武器 并且只会解决情报任务,但这个概念可能会在未来发生变化。
ACTUV 创建程序包括 4 个阶段。 2012年1月,宣布完成第一阶段计划(现阶段确定其实施的可行性,并开展其他评估活动)。 第二和第三阶段的初步工作时间表约为 2 个月,另外 3 个月分配给第四最终阶段。 因此,我们正在谈论实验样本的开发、构建和演示测试阶段。 机器人-船。
目前,ACTUV设备的一些特征是设计的,已知:
- 超过6 000 km的续航里程;
- 能够在距离基地3 000 km处操作;
- 电池寿命为80天数;
- 探测敌方潜艇,计划使用主动站GAR;
- 一艘机器人船的成本将达到20百万美元的水平;
- 订单的使用寿命为15年。
由于视频由科学应用国际公司(SAIC)出版,有关ACTUV项目的新细节和细节已经公布。 五角大楼的新项目旨在开发机器人舰艇,能够在没有人为干预的情况下以全自动模式探测和监视敌方潜艇。 发展这一计划的主要原因是相对廉价的柴电潜艇数量的增加带来的威胁,这种潜艇不仅能够承担许多发展中国家的政府,而且还能够承担或多或少的大型毒品卡特尔。
潜艇艇员有一种说法,即只有2型舰艇:这些是潜艇和目标。 这些话非常接近事实,因为现代潜艇是人类为发动战争而创造的庞大手段中最具破坏性和秘密性的作战单位之一。 似乎五角大楼非常期待结束海洋中潜艇统治的时代,为此目的召唤机器人猎人ACTUV。 国防部已经为这个项目分配了大约58百万美元的优先权。
假设该机器人猎人在完全自主模式下将能够搜索敌方潜艇60-90天。 该船计划完全集成到美国海军的控制系统中。 特别要针对反潜目标 航空,还可以与从直升机和飞机上掉下来的声纳浮标一起工作。 ACTUV的主要工作工具应该是声纳。

在检测到敌方潜艇的情况下,机器人猎人接近它并将有关其位置的数据发送到最近的战舰。 在这种情况下,无人驾驶船可以跟随潜艇直到它离开巡逻区域或直到它被摧毁。 值得注意的是,机器人猎人甚至不必同时隐藏,他可能会使用更有效的声纳辐射模式在空旷地扫描海洋。 当然,敌方潜艇将能够摧毁机器人,但同时它肯定会发现自己,而不是解决其主要战斗任务,对于装备战略核导弹的潜艇来说 - 这是不可接受的。
另外,应该指出的是,与大量为军队服务的无人驾驶车辆不同,船舶猎人ACTUV没有任何武器。 该船的主要任务是搜寻,跟踪和护送敌方潜艇。 如果需要采取积极行动,美国海军的其他船只和飞机将不得不进入该业务。 猎人船可以完全独立地操作,只有当船从相当繁忙的港口港口离开海洋时,人员才需要控制它。
通过各种车载传感器系统和人工智能的组合实现船舶在自主模式下的导航。 据推测,这些传感器中将有远程和短程雷达,光电传感器,激光扫描仪LIDAR(光探测和测距)等设备。 此时,当ACTUV接近敌方潜艇的预定位置时,它将使用一对具有主动“背光”系统的高频声纳,这可以增加其射程和操作精度。 有关潜艇的更多信息必须由特别敏感的传感器 - 磁力计提供。 根据所有收集的数据,无人猎人船将能够建立潜艇的图像并确定其类型,识别潜艇并确定其属于特定国家。
所有收集的数据将由系统在人工智能的基础上进行处理(假设它能够在获得的大量数据上计算敌方船的最近意图)。 因此,例如,从潜水中逃避探测的相当常见的策略之一就是藏在海面上的普通船上。 了解了这种逃避行动,机器人船舶猎人将能够独立地关注那些在给定水域中以受控方向移动的船只。 当然,人工智能系统不会那么完美。 无论如何,经验丰富的潜艇艇员在他的技巧的帮助下将能够让猎人处于寒冷状态,但在这种情况下,ACTUV可以由操作人员控制,他可以独立地纠正可能的系统错误并将船舶指向正确的搜索路径。
ACTUV航天器的第一个原型的出现,将进行相当广泛的海上测试计划,仅在几年内就可以实现。 但是,如果DRAPA能够成功地完成这些工作并使它们达到合理的目的,那么新的ACTUV猎人船可能是改变游戏规则并抵消公海潜艇的因素。
信息来源:
-http://www.arms-expo.ru/049057052048124051048050049053.html
-http://www.dailytechinfo.org/military/4394-opublikovany-podrobnosti-proekta-sozdaniya-sudov-robotov-ohotnikov-za-podvodnymi-lodkami.html
-http://blog.kp.ru/users/4052155/post256725165/
信息