Naviator双介质无人车进入新测试阶段
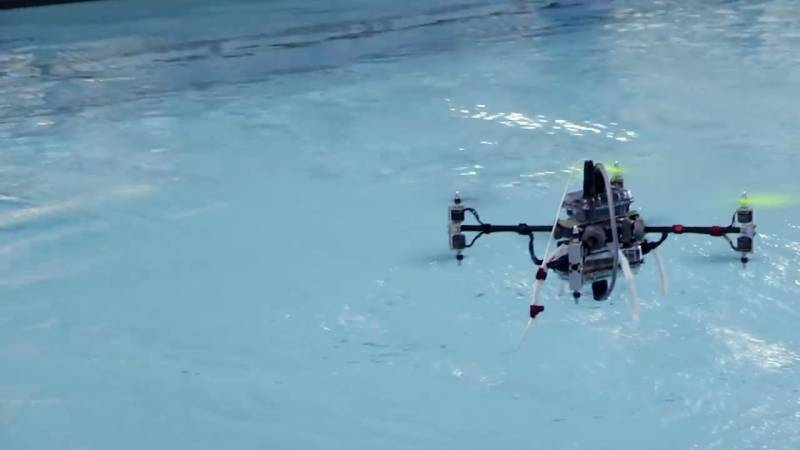
实验性 Naviator 装置登陆水面
五角大楼对各种无人和无人系统表现出极大的兴趣,包括。 具有不寻常的特性和功能。 因此,计划在不久的将来对实验性双介质装置“Naviator”进行新的测试,该装置能够在空中飞行并在水下游泳。 这些活动的目的是确定此类装备和相关技术的军事潜力。
用于空气和水
该项目名为“Naviator”(字面意思是“领航员”;也可以分为“Navy”和“Aviator”——“舰队”和“飞行员”)最初是由罗格斯大学(新泽西州)的专家主动开发的。 2016年,该项目由专门成立的公司SubUAS接管。 现阶段,该项目引起了海军研究办公室的注意,该办公室提供了必要的协助。
罗格斯大学和 SubUAS 于 2016-17 年开始展示双介质设备的原型。 在五角大楼的各种展览中。 开发组织还发布了他们的测试照片和视频。 演示了主要的操作模式——飞行、游泳以及它们之间的转换。
据报道,导航仪概念可以在军事领域得到相当广泛的应用。 此外,当时该项目已经能够引起特种作战部队的兴趣。 然而,没有收到特种部队的命令或请求。 同时,不排除开发机构因项目尚处于早期阶段而无法实施。

水下运动
随后,Naviator 产品的开发工作继续进行。 通过改进设计、引入新设备等。 解决方案提高了空中飞行特性和水中性能参数。 连续作业的持续时间和作业深度也有所增加。 该设备在不同的条件下进行了测试,包括。 在开放空间和水域。 还测试了各种地面平台上无人系统的使用。
新阶段
海军研究办公室仍然对双介质综合体感兴趣,并计划赋予其新功能。 为此,他们最近启动了地下自主导航交付计划,在此期间他们希望测试无人车辆与无人平台的兼容性。
以载体和两种介质的形式开发复合体 无人机 将由 SubUAS 在海军研究办公室的协助下进行。 相应合同于8月3,7日签署。 这项工作的成本估计为 XNUMX 万美元,但没有具体说明工作时间。
此外,SAND 项目的技术方面仍然未知。 客户和承包商并未告知哪个版本的导航仪将接受下一步测试、将与哪种水下运输工具一起使用等。 也许,所有这些细节都会随着计划事件的发生而稍后揭晓。 此外,我们应该期待对所进行的测试的首次评估以及对所提出概念的未来的预测。
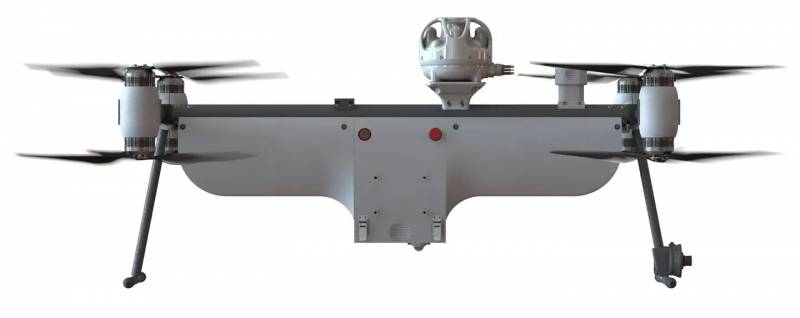
该设备的另一个版本
通用建筑
Naviator项目提供了双介质无人驾驶车辆的原创概念,可以使用各种组件和设备按照客户要求的方式实施。 允许缩放,可以获得不同的技术特性、在不同领域的使用等。 开发组织已经利用了这样的机会 - 已经提出了许多具有不同单元组成和不同参数的原型。
Naviator 设备的总体架构非常简单。 它们的设计类似于常见的四轴飞行器无人机。 有一个带有仪器的中央主体,其上有带有螺旋桨电机组的“梁”。 该系列的所有实验装置均配备八台发动机和螺旋桨。 与机载无人机不同,双介质飞行器的设计经过仔细密封,以防止损坏电气和电子元件。
在空中,无论其设计和特性如何,Naviator 都可以作为成熟的四轴飞行器运行。 它具有垂直、水平飞行、悬停、机动等能力。 与操作员的通信是通过无线电频道进行的。
向水下模式的过渡是通过简单地降落在水面上并进一步使用螺旋桨作为推进器来进行的。 在这种情况下,设备必须“侧向”漂浮才能达到约 10 节的最大速度。 所展示的原型可以潜入 10 至 30 m 的深度。使用设备后面拖曳的柔性电缆代替无线电通信。

使用该设备监测水下状况
双介质无人车可以承载多种有效载荷。 所示样品在外部密封外壳中配备了摄像机。 根据其尺寸和其他特性,该设备可能会接收其他设备。 特别是,正在考虑安装各种传感器甚至武器的可能性。
水下平台
理论上,“Naviator”可以在任何运营商平台上工作。 可以通过配备必要设备的汽车、船只等进行飞行/游泳运输和提供。 作为新 SAND 项目的一部分,他们计划探索放置在无人水下航行器上的可能性。 显然,几个主要的设计问题将得到解决。
首先,有必要解决基于水下平台的问题,并考虑到其具体情况。 有必要为运载车辆创建某种货舱,能够在水下和水面位置释放和返回负载、为电池充电等。 还需要特殊的控制装置来连接远程操作员、水下载体和双介质无人机。
未来,这种水下综合体有望在各个领域得到应用。 因此,首先考虑用于侦察目的。 水下航行器将能够秘密到达线并释放双介质产品,该产品必须升出水面并进行观察、调整等。

“导航者”在排雷行动中的使用
Naviator还可以解决更复杂的问题。 项目开发商已经提出了一种用于防雷修改操作的算法。 在这种情况下,该设备必须在水下运行并搜索危险物体,然后必须升到空中并向扫雷艇传输数据。 然后他可以返回水下并继续工作,直到下一次通信会话。
一般来说,使用双介质技术的其他选择也是可能的。 这完全取决于操作者的需求、所使用的平台和设备等。 SAND 项目很可能不仅会测试一般功能,还会尝试制定不同的应用选项并确定其潜力。
两种环境
因此,五角大楼继续为海军创造和开发装备。 除了现有的无人机和水下航行器之外,人们还正在创建结合其功能的系统。 因此,双介质 Naviator 设备已经在几种不同的配置中展示了其主要功能。 现在他将不得不在水下航母上进行新阶段的测试。
目前尚不清楚新的测试计划是什么,以及他们计划如何使用不同的无人驾驶车辆测试综合体。 然而,这些活动的成功实施将带来什么结果已经很清楚了。 “Naviator”系列设备将得到进一步开发,包括。 根据五角大楼的技术规范。 此外,无人舰队的发展计划可能会有所调整。 未来双介质无人车很有可能得到普及。
信息