早期苏联航天器控制系统的演变

带有内部设备演示的“Sputnik-1”模型。 宇航博物馆的照片
很难想象现代航天器,无论是一次性的还是可重复使用的,国内的还是国外的,没有建立在高性能计算机基础上的复杂控制系统。 然而,情况并非总是如此。 早期苏联设计的航天器根本没有任何控制系统。 然后第一个简单的设备出现在设备上,它们的进一步发展导致了成熟的多功能计算机的出现。
沿着预定的路径
早期用于火箭和空间技术领域实验和研究的国内外探测器和装置都没有完善的控制系统。 船上有用于单个单元和系统的自动化设备,但没有提供全面飞行控制的可能性。 而且,那个时候也不需要他们。
例如,1 年 1 月发射的第一颗人造地球卫星 SP-1957(Sputnik-XNUMX),搭载了电池组、无线电发射机、一套传感器和冷却设备。 没有用于确定空间坐标和位置以及飞行控制的设备。 卫星应该沿着发射时确定的轨道移动。

“Sputnik-2”的模型。 在小写字母中,有一个“小屋”,里面有一只狗。 照片由维基共享资源提供
下一个 Sputnik-2 是根据类似的原理建造的,其有效载荷是装有狗莱卡的容器。 船上只有用于收集和传输动物状态数据的仪器。 但是,还设想了一些过程的自动化,例如可居住容器的冷却。
遥控
即使在初步研究阶段,就已经很清楚,有前途的太空技术应该有一定的控制手段。 卫星必须独立或根据地球的指令打开仪器、进行研究等。 此类设计问题在 1958 年初创建下一个航天器时已经得到解决。
1958 年 3 月,Sputnik-12 或物体 D 进入轨道。 该装置在国内实践中首次采用了自动和远程控制手段。 机载仪表综合体可以接收和执行来自地面控制站的命令。 船上有 XNUMX 台用于各种用途的科学仪器,它们通过命令或机载时间程序装置打开和关闭。 此外,在与地球没有联系的轨道的某些部分,磁带上的遥测记录被自动打开。 连接恢复后,传输记录的信息。
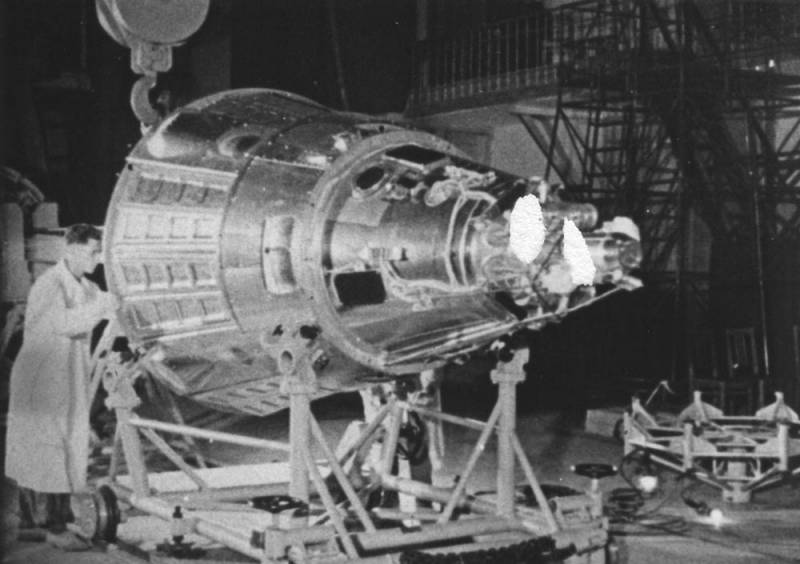
组装阶段的“Sputnik-3”/“D”。 摄影:RGANTD
不久,无线电指令遥控被用于星际研究领域。 从 1958 年秋天开始,苏联多次尝试向月球发送自动行星际站。 第一次发射以事故告终,直到 1959 年 1 月,Luna-2 AMS 才能够接近地球的天然卫星。 同年 XNUMX 月,Luna-XNUMX 飞船首次登陆月球——硬着陆,结构遭到破坏。
在早期的 Luna 产品上,有一套用于各种用途的测量仪器、用于监控其运行的设备,以及用于接收命令和传输遥测数据的无线电台。 为了飞往月球,在所谓的站点上安装了站点。 “E”块 - 运载火箭“Vostok-L”的第三级,具有远程控制的可能性。 该单位负责将 AMS 带到计算出的轨迹上。
发射后,Vostok-L 火箭与 Luna 的飞行被雷达设备从地面跟踪,该设备最初是为测试弹道导弹而创建的。 轨迹数据由基于 BESM-2 机器的特殊计算机系统接收和处理。 当与“月球”的产品“E”偏离最佳轨迹时,复合体形成并向其发送命令以修正轨迹。 总的来说,这样的系统表现良好,尽管存在错误。
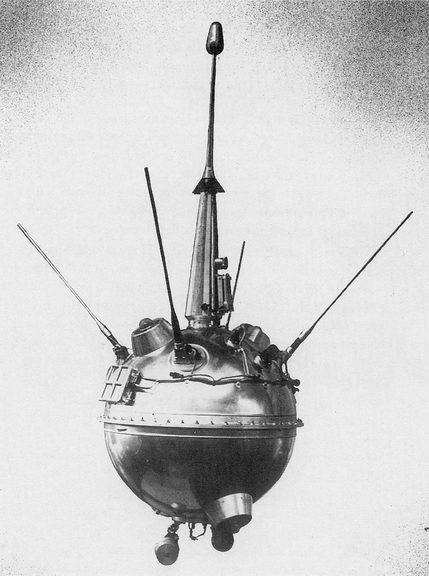
自动站“Luna-2”。 照片由维基共享资源提供
新功能
早期的航天器只能沿着预先计算好的轨迹飞行,由运载火箭或上级发射。 为了进一步发展太空计划,有必要开发一些控制工具,使设备能够在太空中定向并进行机动。
Luna-3 AMS 在 1959 年 XNUMX 月成功发射的开发过程中取得了这方面的第一次成功。为该站创建了一个原始的 Chaika 光电遥测定向系统。 它包括确定太阳和月亮相对于 AMS 的位置的光学元件、计算设备和调车引擎。 该站的科学设备和以前一样,根据控制中心的既定程序或命令工作。
正是“Chaika”系统的存在使“Luna-3”能够拍摄地球的天然卫星,包括。 它的反面。 未来,该系统的发展及其主要思想被积极用于其他空间技术项目。
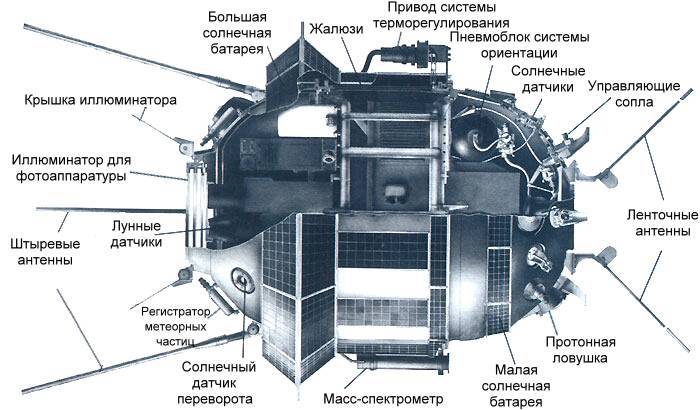
带有定向系统“海鸥”的“Luna-3”。 图形 Astronaut.ru
自主控制
自 1957 年以来,一直在开发很有前途的载人航天器,后来称为东方号。 他收到了相互复制的自动和手动控制系统。 所有方法都以某种简单性为特征,并与任务集相对应。 因此,该设备使在轨道上进行定向和下降成为可能。 几乎没有其他功能。 为了在太空中定位,这艘船有一套由自动化或宇航员控制的低功率发动机。
使用红外传感器进行水平对准。 沿着轨道轴,飞船由太阳(自动)或地球使用 Vzor 装置(手动)引导。 独立或根据命令,自动化可以使用制动推进系统执行从轨道下降。 宇航员被要求在 Globus 导航设备的帮助下执行这些任务,该设备计算出大致的着陆区。
1960 年 4 月,首次以无人驾驶配置发射试验性东方号。 由于定位系统故障,名为“Sputnik-19”的设备无法返回地球。 然后又进行了几次发射,包括。 带有科学设备、动物和假人形式的有效载荷。 例如,1960 年 XNUMX 月 XNUMX 日,著名的 Belka 和 Strelka 进入太空。 出于显而易见的原因,这些航班仅使用自动和远程控制。

载人飞船“东方号”仪表盘。 照片由维基共享资源提供
最后,在 12 年 1961 月 XNUMX 日,东方号以载人配置进行了首飞。 在世界上第一位飞行员宇航员 Yu.A. 的控制下。 加加林的飞船绕了一圈,成功返回地球。 在接下来的两年里,又进行了五次搭载宇航员的东方号航天器发射和大量无人驾驶测试。 所有这些活动都证实了新控制系统的可操作性。
板电脑
早在 Luna 或 Vostok 航天器的开发过程中,苏联专家就在研究进一步开发航天器和 AMS 控制系统的方法。 因此,在五十年代后期,开始研究将航天器送往火星的课题。 起初,这项工作是在 1M 计划的框架内进行的。
在这样的程序中使用无线电命令控制实际上被排除在外。 与以前的项目一样,单独的自动化工具也有其缺点。 在这方面,决定创建所谓的。 基于机载中央计算机的计算单元,所有其他 AMS 系统都将连接到该计算机。 此外,通过引入新的解决方案和现代组件库,成功解决了创建 SRB 的任务。 事实上,它是关于在飞行期间执行所有任务的单个机载计算机。
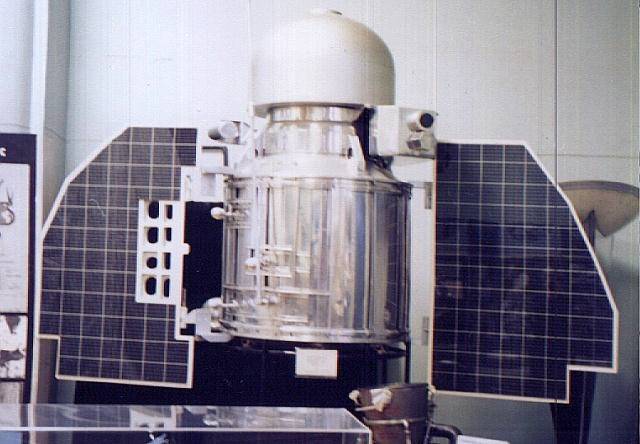
AMS“Mars-1960”配备成熟的机载计算机。 照片由维基共享资源提供
作为 1M 计划的一部分,建造了两个 Mars-1960 站。 他们必须自动飞近火星,收集科学数据并将其传输到地球。 两个 AMS 的发射都是在 1960 年 XNUMX 月进行的,两次发射都以事故告终——空间站在大气层中烧毁。 无法在飞行中测试 SRB。
然而,SRB 理念的发展并没有消失。 很快,“重型星际飞船”TMK 的研制开始了,他们还决定为其配备单一的计算系统。 该项目并未取得成功,但其开发人员在为太空创建计算机方面再次取得了进展。
最后,作为 TMK 工作的一部分,最终形成并制定了负责所有操作并帮助机组人员的单一机载计算机的概念。 很快,这个概念被用于创建联盟号载人飞船、礼炮轨道站和许多其他项目。
联盟号宇宙飞船早期机载计算机的模块之一。 照片 habr.com
进化过程
五六十年代,火箭和太空领域的发展取得了高速发展。 决定航天学进一步发展的关键事件以令人羡慕的规律性发生,而且它们通常相隔几个月。 同时,大量来自不同领域的企业和专家进入行业,有助于快速解决问题。
航天器和船舶控制系统的发展很好地说明了这些趋势。 因此,在 1957 年,Sputnik-1 在没有任何控制手段的情况下进入轨道,并在 1960 年制造并发射了带有多功能机载计算机的 AMS。 与此同时,形成了主要思想和概念,这些思想和概念仍在航天学中使用 - 但已经达到现代技术水平。
信息