宇宙飞船“暴风雪”的控制系统

发射台上的 Energia-Buran 系统。 NPO Molniya 摄
15 年 1988 月 XNUMX 日,苏联可重复使用航天器暴风雪号进行了第一次也是唯一一次轨道飞行。 在Energia运载火箭的帮助下,该船进入轨道,绕了两个轨道并在机场进行了水平降落后返回了地球。 使用独特的机载控件,飞行是全自动的。
艰巨的任务
1976 年开始开发有前途的可重复使用火箭和太空运输系统,这导致了 Buran 的出现。专门创建的 NPO Molniya,由总设计师 G.E. 洛齐诺-洛津斯基。 数十家其他科学和设计组织也参与了该项目。 例如,化学自动化设计局(沃罗涅日)和机械工程研究所(Nizhnyaya Salda)负责推进系统的开发。
项目参与者必须形成未来船舶的最佳形象,并以成熟项目的形式实施。 同时,还需要解决大量各种各样的技术问题。 所以,按照职权范围,未来的Buran应该是有人驾驶的,但计划使用功能广泛的自动驾驶仪。 这艘船应该有自动飞行、下降和着陆模式。

“暴风雪”首飞后。 NPO Molniya 摄
一般来说,控制系统的发展分为几个主要领域。 第一项涉及为设计用于在大气层中飞行的滑翔机开发方向舵和相关系统。 第二项任务是为太空工作创建一个复杂的调车引擎。 在第三方向的框架内,为它们开发了车载电子设备、计算工具和软件。 这些资金本应用于控制其他控制系统的运行。
所有系统的设计都在八十年代上半叶完成。 这使得开始建造 BTS-002 模拟飞机以进行后续大气测试成为可能。 此外,已经开始建造成熟的航天器。
气动控制
“暴风雪”是根据“无尾”方案建造的,具有低平三角翼,前缘具有可变后掠角。 机身尾部有龙骨。 凭借这样的空气动力学外形,轨道飞行器可以在大气层中进行滑翔飞行,这是正常降落所必需的。
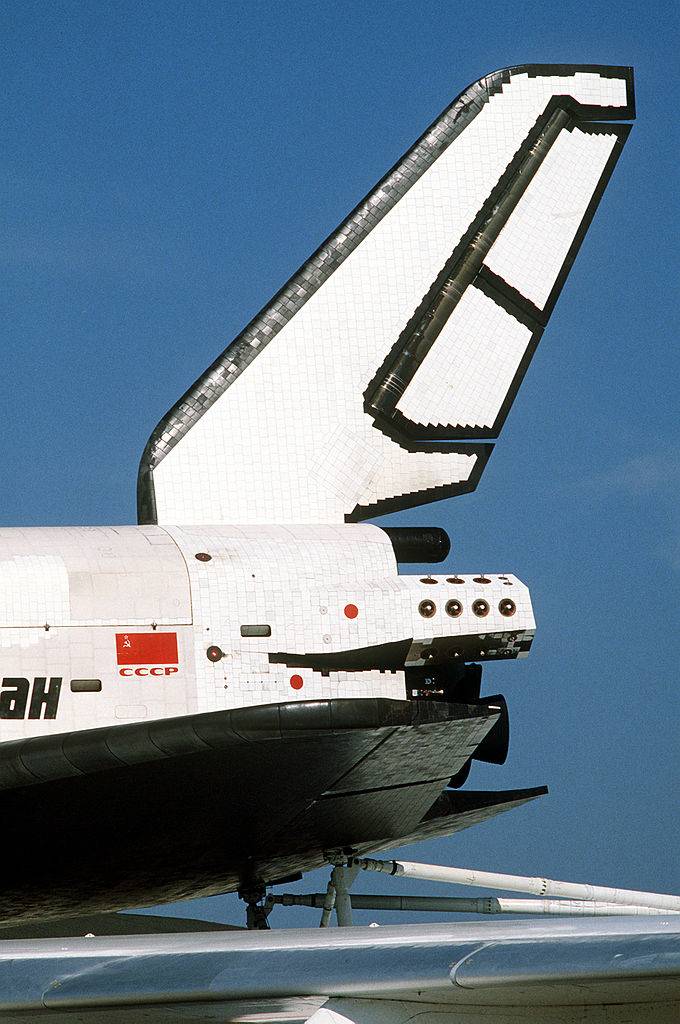
“暴风雪”号的尾巴。 带方向舵的龙骨、控制和定向发动机组、升降副翼和平衡护罩清晰可见。 照片由维基共享资源提供
为了控制着陆,“Buran”获得了相当简单和熟悉的手段。 大面积升降副翼被放置在机翼的后缘:它们的同步或差动偏转使得控制滚转和俯仰成为可能。 在升降副翼之间,从下方的机身尾部,他们放置了所谓的。 平衡盾。 在它的帮助下,超音速和超音速下的可控性得到了改善。 龙骨上是方向舵。 它由两个对称的垂直部分组成,可以向两侧发散并执行空气制动器的任务。
所有转向面均由液压驱动。 为了提高可靠性,Buran 获得了三个独立的液压系统,它们有自己的泵、管道等。 负责驱动方向舵的液压执行器由来自主控制系统的电信号远程控制。
空间控制
对于在轨道上的工作、机动和定向,Buran 获得了所谓的。 综合推进系统(APU)。 它包括两个尾部推力为 90 kN 的维持发动机。 该舰还接收了 38 台控制引擎和 8 台精确定位引擎。 这些装置被放置在前机身中,顶部和侧面都有喷嘴,还有两个典型的尾部护罩。
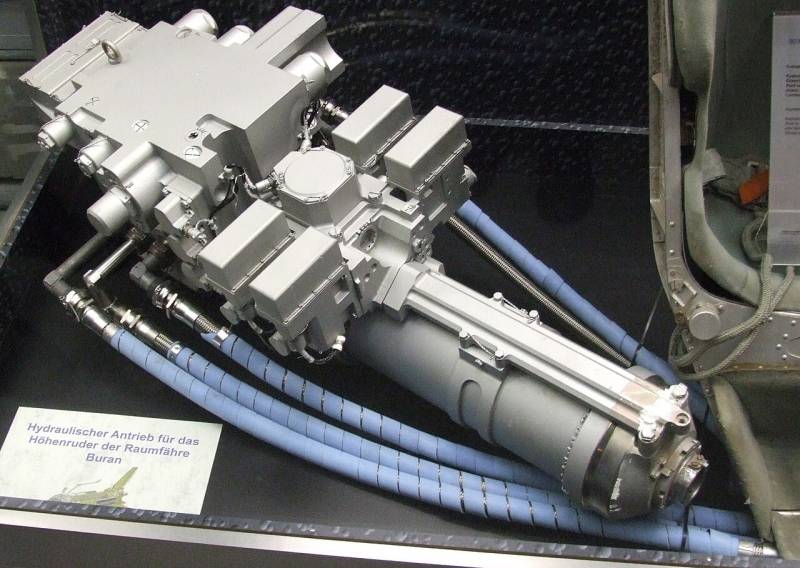
其中一个气动方向舵的液压驱动。 照片由维基共享资源提供
在轨的主要工作分配给 17D15 型控制引擎。 它们位于机身的不同部分,并指向不同的方向。 在规定的时间内打开某些发动机,船员或自动驾驶仪必须改变船的方向。 此外,控制引擎可以复制行进引擎,但会损失性能。
产品 17D15 是一种由碳氢化合物燃料和氧气提供动力的气液火箭发动机。 其中一款产品的推力达到 4 kN,比冲高达 290-295 秒。 在飞行过程中,发动机最多可以启动 2 次。 总资源量为26个包裹体。
定向引擎在设计上与控制引擎相似,但在更小的尺寸和其他特性上有所不同。 它的推力仅达到 200 N,比冲为 265 秒。 同时,每次飞行允许携带 5 件夹杂物。 由于较低的推力,提供了船舶在太空中更准确的定位,足以进行某些工作。
ODE 的控制是在适当仪器的帮助下集中进行的。 安装的操作由工作人员和/或自动化控制,具体取决于执行的活动和任务。

机组模拟器驾驶舱。 照片由维基共享资源提供
计算复杂
为 Buran 创建了一个最复杂的控制系统,它确保所有模式的飞行和辅助任务的解决,科学或实践活动的实施等。 它包括超过 1250 种不同的设备和设备、数字计算工具,以及无数的电缆线路等。 控制系统的各种设备几乎分布在整个船体上。
控制系统的基础是机载中央计算机综合体(OCCC),分为中央和外围两个系统。 每个这样的系统都建立在两台 BISER-4 计算机的基础上。 机载数字计算机的这种架构确保了整个综合体的高可靠性和容错性。 产品 BISER-4 由 NPTsAP 他们开发。 Academician Pilyugin 是一台 32 位机器,CPU 性能为 37x104 操作/秒功耗 - 270 W,重量 - 34 kg。
BTsVK 从各种传感器、工具和系统收集和处理数据。 他负责太空和大气层的导航,控制组件和组件的状况,与综合体的地面设施交换数据等。 该综合体还控制气动方向舵和 ODU 的操作。 在手动飞行控制模式下,BTsVK 应该将机组人员的动作转换为执行器的指令。 自动模式提供完全独立的工作。
对于 BTsVK,原始软件是以操作系统和一组附加程序的形式创建的。 当时的软件总量非常出色 - 大约。 100MB。
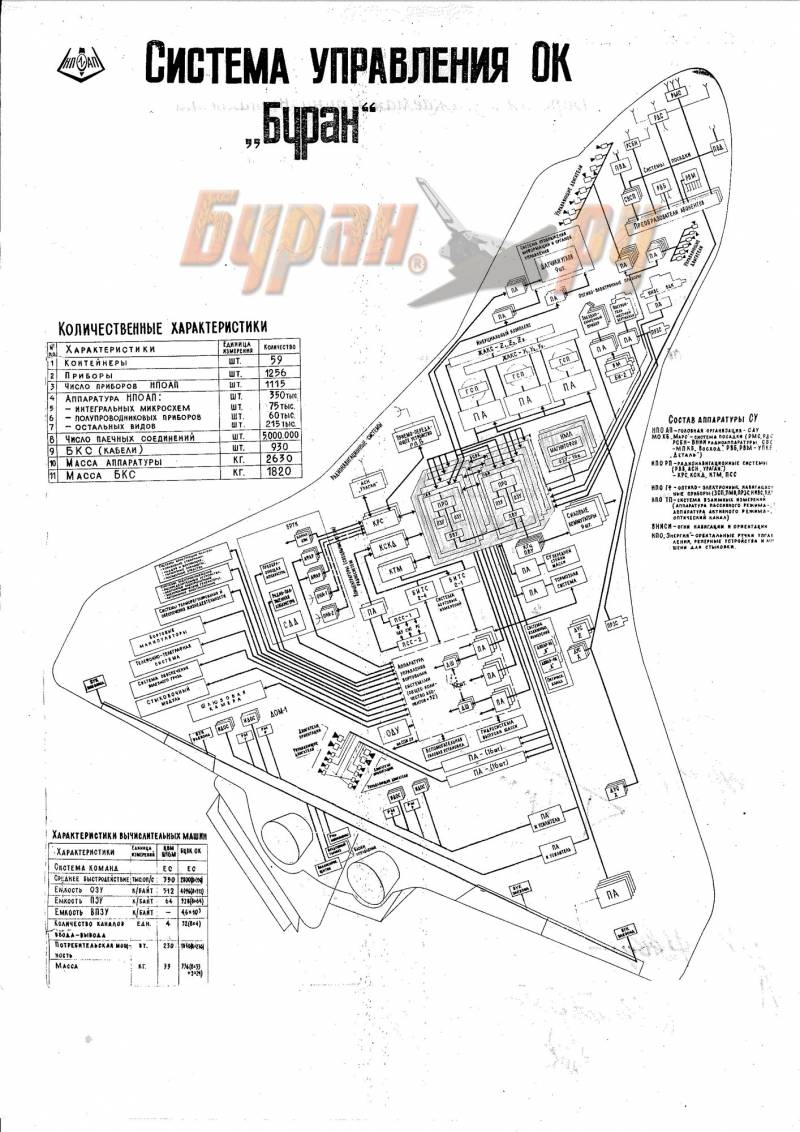
控制系统示意图。 图形 Buran.ru
软件综合体确保了硬件的运行、机载数字计算机与各种设备的交互等。 除其他外,它在所有模式下都实施了自动飞行控制算法。 特别令人感兴趣的是自动从轨道下降、在大气层中飞行并在给定机场着陆的可能性。 奇怪的是,最初只提供了自动降落模式。 后来在客户的坚持下添加了手册。
实践证明
1984 年,NPO Molniya 在 Buran 项目其他参与者的协助下,建造了模拟飞机 BTS-002,也称为 OK-GLI 或“0.02”。 它是一架轨道飞行器的复制品,经过改装可以在大气层中水平起飞和飞行。 BTS-02 几乎完全重复了 Buran 的设计,并拥有所有必要的控制、计算机系统等。 同时搭载涡轮喷气发动机。
10 年 1985 月 002 日,宇航员 Igor Volk 和 Rimantas Stankevičius 首次驾驶 BTS-1985 升空。 次年 16 月,在第四次飞行中,首次测试了半自动计划——飞行员保留了对飞机的控制,但部分任务被转移到自动化。 1987年底,进行了自动飞行到机场的试验; 手动控制仅在触摸之前打开。 终于,002 年 1988 月 XNUMX 日,在第 XNUMX 次飞行中,BTS-XNUMX 首次自行着陆。 直到 XNUMX 年春天,完成了十几次类似的飞行来测试系统和算法。

陀螺仪惯性导航装置 Sh300(前景),专为暴风雪而设计。 照片由维基共享资源提供
最后,在 15 年 1988 月 XNUMX 日,暴风雪号轨道进行了第一次也是唯一一次太空飞行。 绕地球两圈后,飞船自动下降,降落在拜科努尔机场。 在着陆阶段,BTsVK 从地面设施接收了机场天气状况的数据,正确评估了这些数据并进行了意想不到的机动。 “暴风雪”自主构建最优进近,逆风着陆。
过去的技术
不幸的是,布兰的第一次太空飞行仍然是唯一一次。 后来,由于种种原因,其中大部分都不能称为客观原因,Energia-Buran 计划被缩减,更多的工作没有恢复。 飞船的轨道、大气层等样品去了永恒泊位,有的幸运地成为了博物馆的展品。
然而,即使有了这样的结果,大胆而有前途的暴风雪计划也显示出了它的潜力。 苏联工业已经证明了其开发此类设备并至少对其进行测试的能力。 使用可用的和新开发的技术和组件,我们的企业已经能够创建具有独特功能的空间系统。
但是,在未来,Buran 项目的经验,包括。 在控制系统方面,整体上仍无人认领。 在 Energia-Buran 仅推出后的头几年或几十年里,业界没有机会全面发展这个方向。 然后出现了具有更大潜力的新技术和更先进的元素基础。
信息