MAI 正在开发一种新的自主 RTK 控制系统
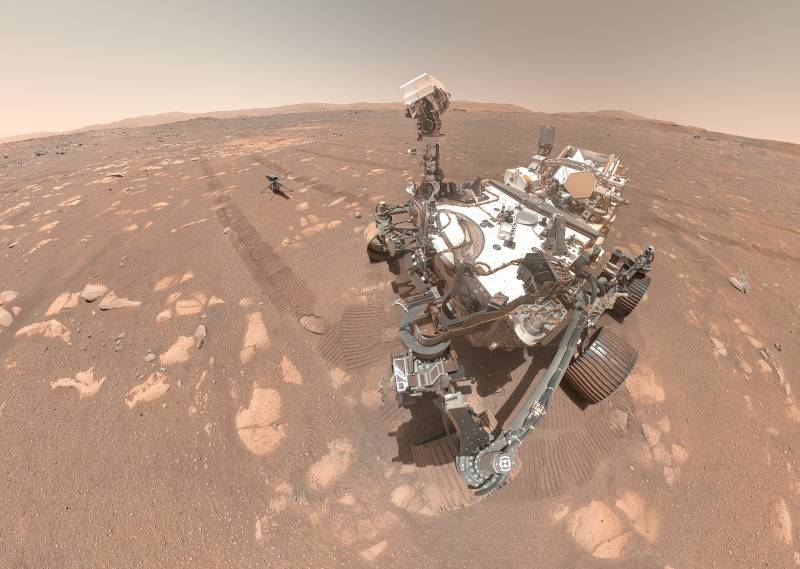
毅力号火星车是 SLAM 技术应用的一个例子。 美国宇航局摄
要创建各种有前途的机器人系统,需要广泛的各种技术。 自主控制系统、视觉辅助技术等在这方面尤为重要。 国内一些组织正在开发此类系统和技术,并定期有新参与者加入此类工作。 因此,最近人们知道莫斯科航空学院的学生正在开发另一个类似的项目。
透视发展
3 月底,MAI 新闻服务宣布开发了一个有趣的新项目。 MAI 第 6 航空航天学院三年级学生 Aleksey Koltovsky 创建了一个具有自主控制功能的软件包 机器人. 未来该项目的发展可用于创建各种机器人系统,包括。 空间目的地。
该项目出现的原因是需要摆脱空间系统面临的特征问题和限制。 因此,从地球到火星的无线电信号大约需要 15 分钟,而接收响应也需要相同的时间。 因此,行星漫游车或其他设备的远程控制实际上变得不可能。 此外,由于发送的照片或视频信号质量不佳,运营商难以评估情况。
解决这些问题的方法,按照A. Koltovsky 的设想,应该是一个具有自主导航和驾驶功能的软件包。 现代硬件和软件允许机器人创建环境的三维表示,以及独立做出决定和制定路线。
据报道,目前,一名学生开发人员正在创建一个具有必要功能和能力的软件包。 该项目的下一阶段已经在计划中。 春天,作者和他的同事们将进行第一次测试。 他们将使用自行式六轮平台,该平台将配备基于新算法的控制装置。

实验性 RTK“标记”,旨在测试新技术。 照片 FPI
A. Koltovsky 指出,如果成功,他的项目中的新软件工具和技术可用于创建各种 RTK,以解决范围广泛的任务。 开发商本人主要专注于太空领域 - 研究车辆将能够充分发挥新技术的潜力。
自治和简化
MAI 新闻服务的出版物描述了开发系统的一般原则、其功能和优势。 总的来说,我们谈论的是已知解决方案的使用,但针对特定的实际任务和范围进行了调整和改进。 因此,建议减少使用的设备范围,并以最少的数量来解决问题。
为了简化设计和软件,建议仅使用光学手段对地形/路线进行视觉研究。 不提供加速度计或其他设备的使用。 一组摄像机连接到计算机,该计算机执行必要的计算并向执行器发出命令。
整个综合体应该在“同步定位和映射”(Simultaneous Localization And Mapping - SLAM)技术上工作。 计算机将接收来自摄像机的视频信号,并对其进行处理,绘制出该地区的所有特征的地图,包括。 有障碍。 基于这些数据,自动化将建立一条路线并决定如何克服每个障碍。
高级综合体的软件是用 Python 编写的。 此外,作者还使用了机器学习和机器视觉库。 目前的主要任务是优化所使用的算法和数据集,以降低所需的计算能力,同时提高性能。
A. Koltovsky 指出,现有的原始形式的 OpenCV 库,未经优化,能够以每秒 0,82 帧的速率处理视频信号。 算法的优化使您可以将性能提高到每秒 8-10 帧。

轮式底盘上的“标记”。 照片 FPI
总的来说,SLAM技术具有广阔的前景,并且已经在实践中展示了它的能力。 因此,美国国家航空航天局的毅力漫游者确定了障碍,包括。 通过光学手段。 通过创建该区域的三维地图进行照片和视频处理,可以将允许的速度从 20 m/h 提高到 120 m/h - 六倍。
值得注意的是,这样的项目对俄罗斯科学来说是独一无二的。 基于SLAM的自主控制系统软件系统的创建及其对我国相对低功耗计算平台的适配任务尚未解决。 因此,一个学生项目至少有 历史性 的价值
在行业背景下
近年来,我国研制了一大批功能各异、性能各异的地基RTK。 其中一些系统甚至已经在各个机构和部门得到实际应用。 特别是,用于军队的几种类型的机器人已广为人知。 同时,行业的发展和新项目的开发也没有停止。 此外,各种组织和爱好者正在为以下项目创建科技基地。
目前该行业的主要任务之一是创建能够在不同条件下行驶、沿着给定路线行驶或独立克服障碍的自主控制系统。 为了解决这些问题,使用了各种所谓的装置。 技术视野和带有特殊软件的车载计算机。
用于自动驾驶地面 RTK 的标准传感器集包括摄像头和激光雷达,在某些情况下还包括超声波或雷达传感器。 所有这些设备都收集数据,计算机将这些数据组合成适合定位的区域的三维地图。 此外,来自卫星或惯性导航辅助设备的数据被添加到地形图中。
这种确定位置和制定路线的方法早已显示并证实了它的潜力和能力。 然而,从硬件的角度来看,它具有一定的复杂性和高成本——它使用相当复杂和昂贵的传感器。 此外,最终 RTK 的仪器部分因此在尺寸和重量上存在很大差异。

重型工程 RTK“Prohod-1”——在运行过程中,部分任务由自动化解决。 照片 VNII“信号”
MAI 的一个新项目提议优化地图绘制和地面后续导航的过程。 它的主要想法是放弃除摄像机之外的所有传感器,同时改进所使用的软件。 从理论上讲,这种方法在技术上和经济上都是相当有利的,尽管新技术需要开发和测试。
MAI 学生的项目或其他作者的类似开发在为各种任务进一步开发 RTK 的背景下很有意义。 在驾驶时增加机器人的自主性可以减轻操作员的负担并确保路线的成功通过。
此外,可以创建在困难条件下工作的完全自主系统,包括。 当无法使用无线电控制时。 新系统的开发人员表示,这将有助于太空探索。 然而,地球上有自主机器的工作。
乐观的理由
MAI 学生的控制系统项目仍处于开发阶段,但预计将使用实验地面平台进行测试。 春季将对新技术进行实际测试,届时新项目的成功程度将一目了然。 然后就可以对其进行评估并确定该行业的真正价值。
经验丰富的 RTK 及其控制系统能否应对即将到来的检查尚不得而知。 然而,即使是现在,这个项目也表明,现在——由于进步和必要开发的可用性——不仅大型组织,而且爱好者或学生也可以创造有前途的技术。 并且未来此类项目很有可能会对整个行业的发展产生重大影响。
信息