通用防空导弹系统C-300В
开发防空导弹系统(防空导弹系统)C-300В的需要主要取决于希望为敌军战术和战术弹道导弹的影响提供地面部队重要设施的掩护。
预计在行动期间敌人可以使用320导弹“Lance”,150“中士”和350“Pershing”,其最大射程分别为75,140和740公里。
在1960开始时,Zashchita研究论文首次研究了将其用于防空目的的可能性。 在具有Krug复合体的弹道导弹上进行实验射击,该复合体具有额外的半主动导航通道,其在防空导弹的轨道的最后部分上提供了小的失误。 这些镜头显示了在防空导弹系统的帮助下与中士和兰斯弹道导弹作战的可能性,但为了解决与保护潘兴弹道导弹有关的防空任务,有必要开发基于高潜力雷达制导和目标探测的新一代复合体。 ,以及具有高能量特性的防空导弹。
在1963-1964的“Binom”研究工作期间,确定地面部队的覆盖最适合联合使用三种类型的先进防空导弹系统,符号为“A”,“B”和“C”。 其中,“A”和“B”将是通用的,能够解决防空和常规防空防御以及后者 - 防空的问题。 与此同时,最好的作战能力,其中“潘兴”导弹能够击中潘兴导弹的导弹的能力应该是在“A”复合体 据推测,对于防空导弹综合体“A”,将开发一种火箭,其大小和质量接近于该综合体的Krug防空导弹,但其平均飞行速度是其两倍并且能够拦截更高海拔的潘兴导弹12千米,具有预期的探测时间并采取弹道目标进行跟踪。 与此同时,即使在1,5 Mt的核爆炸发生爆炸的情况下,生活的公开力量的损失也限制在10百分比的水平,并且考虑到大多数人在不同的避难所和装甲设施中的存在 - 这个值要小得多。
特别困难与弹道目标的检测和目标反导弹(SAM)有关。 这需要创造新一代的高潜力雷达设施。 根据几项实验研究的结果,确定“潘兴”BR的可拆卸头部的EPR与飞机相比要小两个数量级。 随着电力供应的增加,雷达站潜力的增加导致雷达站的质量和尺寸显着增加,这限制了其移动性和机动性。 雷达接收器灵敏度的增加导致噪声抗扰度恶化。 需要折衷的解决方案 - 雷达探测和引导的接收器和发射机功率的可接受的灵敏度。
根据无线电通信局在最重要的一线目标的潜在敌人的第一次打击中预计支出与ABC,确定对于同时类型为“A”的防空导弹系统,至少应同时启动防空模式中的3目标通道。 因此,希望具有多通道和多功能导弹制导站,其在可能的外观,跟踪和发射其中许多反导弹的部分中提供快速自主搜索和探测弹道导弹。 与此同时,防空导弹系统(用于早期探测和目标指定的雷达,多通道制导站,带导弹的发射器)的元件必须具有高度移动性(自行推进,具有导航,定向和地形参考设备,数据传输和通信,具有嵌入式自主电源)。
防空导弹站破坏区域远处边界的能力限制取决于多通道导弹制导站的允许重量。 决定将复杂的“ A”型飞机的主要部件安装在越野能力高,总重量小于40-45吨(立交桥和桥梁的越野能力最大)的自行式底盘上。 无法使用可用的设计有轮式底盘作为复杂“ A”的基础,因此重型底盘应该已经成为重型底盘 短歌。 这样就可以定位电子设备(传输,接收,指示器,计算,控制和其他)以及数据传输,通信设备和总重量约20至25吨的自主电源。
作为那些的根本。 多通道引导站解决方案选择了具有无源相控天线阵列(PAR)的厘米波段的相干脉冲雷达。 从发光装置的喇叭发射器执行“在灯上”的工作,其以接收反射信号的模式连接到接收装置。 通过数字波束控制系统执行X射线宽电子束扫描(在仰角和方位角平面中),该数字波束控制系统改变通过包含与该系统相关联的移相器的晶格元件的接收(传输)高频能量的相位。 该系统提供了在方位角上从-1°到-45°的范围内的目标的搜索和跟踪,以及相对于相控天线阵列的平面的法线的仰角,其被设置为与地平线成45度的角度。
以这种方式形成的搜索部门使得探测和配备任何入射角的弹道导弹成为可能,并且还提供了足够覆盖导弹沿被覆物体发射的可能方向(方位角 - 90°)。 搜索和跟踪应该根据一个程序进行,该程序在搜索期间在预期的火箭轨迹方向和地面方向上提供更频繁的光束转向,以便及时检测低空飞行目标。 当目标被射击时 - 朝着这个目标的方向射击并且防空导弹被瞄准它。 通过多通道引导站的波束控制系统和跟踪数字系统(SAM和目标运动延长器)的联合操作来进行伴奏。 该站应该使用单脉冲雷达方法。 为了搜索和检测目标,总辐射方向图和接收设备的相应信道服务;用于跟踪,差分(接收时)和总(辐射)图和接收机输入部分的相应信道。 总辐射图和相应的接收器通道提供了最大的目标检测范围。 在跟踪期间,相同的辐射图案提供了目标的最高辐射能量。 这增加了与接收器差分通道的目标跟踪距离。

接收器通道和差分辐射图案使得可以获得伴随目标和SAM的角坐标的高精度,这是单脉冲雷达方法中固有的。 在搜索期间,它应该使用更长时间的高能量脉冲。 跟踪期间 - 双离散信号突发,提供高功率,出色的分辨率,良好的跟踪精度和目标(速度和范围)。 所有这些使得可以在站中组合良好的目标跟踪精度和长距离,以提供针对被动和主动干扰的有效保护以及根据动态和信号标志识别目标的能力。 计算表明,当发射机功率10千瓦,接收装置10-14瓦特的敏感性,波束宽度1度多信道指导站防空导弹复杂“A”将确保飞机和弹道导弹上可接受的检测范围覆盖针对攻击机和弹道导弹区根据zour和目标的渠道。
在1965年,根据研究结果,Binom开发了TTZ和关于通用军用A型防空导弹系统设计的初步数据。 该防空导弹系统(密码“棱镜”)的初步设计的开发是在V.Svistov的指导下进行的。 在军事工业综合体的同一决定中,作为Krug-M防空导弹系统的通用版本,在无线电工业部的20研究所。 考虑了两种防空导弹系统的变种。
系统第一版的组成:
1。 指挥所有一个通信枢纽,放置在3-4运输车辆上。
2。 具有相控天线阵列和工作扇区60-70仰角和方位角度的多功能雷达,放置在两个或三个运输单元上。 雷达站必须进行:
- 搜索,捕获和跟踪;
- 识别目标等级(BR或飞机);
- 在假目标的背景下识别弹道导弹的分离弹头;
- 推断弹道导弹的轨迹以确定坠落点;
- 控制背光站,确保1导弹在最终轨道区域自我归位,并发布识别和指挥制导雷达站的目标指定(在初始和中间轨迹站点);
- 在归航头捕获目标之前管理XUR-1轨迹。
3。 用于确定在单个识别系统中操作的目标的状态的站。
4。 目标照明站,确保捕获GOS ZUR-1。
5。 Zour-1的重量为5-7吨,具有组合式制导系统(用于销毁飞机和BR)。
6。 2-3 3,5-XNUMX具有命令引导系统(用于销毁飞机)。
7。 两种类型的发射器(使用ZUR-1和ZUR-2)。
8。 雷达目标识别和指挥指导。

在第二个,该复合体的简化版本没有提供使用归巢的Zur-1。
在Prism综合体中,可以将目标信道的数量带到6(精确定位和识别的雷达站数量增加,以及ZUR-1和-2的发射器数量增加)。
具有三个目标通道的Prism复合体中的车辆总数从25到27单元,这使得复杂的结构变得繁琐且非常昂贵。
但是,解决了在该项目中建立军用防空导弹防御系统的主要问题。
这一结论是在1967的Gran在国防部3研究所设立的专题研究工作“Rhomb”中进行的,其目的是评估棱镜复合体的先进设计,并在此基础上为其开发战术和技术项目。设计工作,以创建SV的反导防御力可接受的成本和结构的复杂性。
尽管棱镜项目“棱镜”通过各种手段过度饱和,但应该指出的是在V.Svistov的指导下开发的。 在研究工作“棱镜”主要技术。 军事反导弹综合体和先进项目的决定首先证明了建立一个普遍的军事综合体的现实。 最初,很难说服军工集团领导人,特别是该国防空系统反导弹防御系统的首席设计师Kisunko GV,他断然否认有可能建立一个基于拟议的V. Svistovym的系统。 解决方案(带有相控天线阵的移动雷达,两个导弹等)。 只有无线电行业部长Kalmykov VD的支持,该国防空部队防空系统的总设计师A. Raspletin。 和Radioprom Chudakov PM的20科学研究所所长 允许保护avanproekt,并创建一个自行式部队防空导弹系统C-300В。

另一方面,与此同时,在无线电工业部KB-1的倡议和防空部队的指挥下,该提案被认为是为苏联的三种武装力量-地面部队,防空部队和海军-建立统一的建议。 舰队 -防空SAM-S-500U的最大破坏范围约为100公里。 这符合用棱镜或A型复合体击中飞机的要求。
只是由于武装部队总参谋部科学技术委员会的专心态度,最重要的是R. Valiev。 - 对空防御系统的领导者 - 能够举办一次与客户的这个建议所有类型苏联武装力量的讨论和说服与会者在讨论,而且S-500U的防空部队CB所提出的修改才会发声事件,将能够提供在必要的范围内进行导弹防御。 当时的最后一次并不是海军和该国防空部队所必需的,但是,它需要解决复杂的其他技术问题。
考虑到对苏共中央的C-500U分辨率和部长27.05.1969的苏联部长会议困难建议全面讨论的结果给予了苏联武装部队在一个单一的战术技术要求不亚于同类型,称为C-300的可能统一防空导弹系统的开发。
莫斯科设计局“箭”(广电行业的前KB-1部,后来成为一个科学生产协会“阿尔马兹”)为国家防空S-300P的防空部队创建,船舶工业(后来研究院“牵牛星”)的ER部的研究所创建海军的C-300F综合体和无线电工业部的MIE(原研究所 - 无线电工业部的20,后来进入Antey科学和生产协会)创建了C-300通用防空和反导系统 地面部队的防空。

据设想,对于从25到25千米高度飞行的目标的防空防御,速度高达3,5千公里/小时,范围为6 - 75 km,莫斯科设计局Fakel将使用所有统一的综合体。 Minradioprom(首席设计师Grushin V.P.)Zur B-500Р拥有综合制导系统。 在第一阶段,创建了一个简化且更便宜的B-500K导弹防御系统,该系统具有无线电指令制导系统,可在远至50千米的距离内使用。
斯维尔德洛夫斯克机械设计局Novator MAP(设计局300 GKAT,首席设计师Lyulev LV,当时的Smirnov VA)专门开发了KS-8火箭,以摧毁目标高度96千米。与此同时,覆盖了潘兴导弹的35 km300区域。
但是,无法实现C-300防空导弹系统的深度统一。 在C-300P和C-300系统中,大约50百分比在功能设备层面统一,只有雷达站检测到指挥所。 在海军的防空系统和该国的防空部队中,使用了由Grushin PD开发的单一防空导弹。
C-300V在开发过程中的创造者已经放弃使用由两个不同设计局开发的防空导弹。 优先考虑火箭Lyulyeva L.V.的防空版本。
物业及设备改造C-300武装部队的不同分支(除雷达全向系统S-300P和C-300V创建NIIIP MCI和莫斯科设计局“火炬” MAP开发面空导弹的S-300F和C-300P)开发各种工业企业使用其组件和技术,为这些设施提供客户(车队,部队,国防)的各种运营要求。
八十年代末,C-300P防空导弹系统开发商和客户确信需要一个通用的移动防空导弹系统,以确保保护领土防空设施免受战术弹道导弹的攻击。 这是开始创建这样一个系统的工作的动力,该系统被命名为C-300PMU。

科走式与对C-300V的C-300,局部战术技术要求的共同(共享)战术技术要求研制的防空导弹系统C-300V,增加为C-300V的战术技术要求,补充战术用于雷达“审查-3”,其被用作在系统上的雷达轮视图的技术要求,对一个雷达站方案审查“生姜”的发展职权范围,以及其上的修正。
根据S-300V防空系统的战术和技术要求,它被认为是一线防空武器,旨在销毁巡航导弹,陆基弹道导弹(潘兴,兰斯)和航空(SRAM),禁止活动干扰机,飞机战术和战略 航空,在困难的干扰和空中情况下,在指示的攻击手段大量使用的条件下作战直升机,同时由掩护部队进行机动作战。 设想使用两种类型的导弹:
- 9М82用于对Pershing弹道导弹,SRAM飞机弹道导弹,在相当远的飞机上采取行动;
- 9М83用于击中弹道导弹Lance和P-17(飞毛腿),空气动力学目标。
防空导弹系统C-300(9K81)的组成包括:
- 指挥所9С457,循环审查雷达站“Review-3”(9СXNNXXМ);
- 雷达软件审核“姜”(9S19M2),用于探测弹道导弹弹头“潘兴”导弹aeroballistic SRAM,在100万平方米的距离游荡,董事飞机。
- 四个防空导弹综合体。
每个防空导弹系统包括:
- 多通道台导弹导弹9C32;
- 两种类型的发射器(9A82 - 具有两个面对空飞弹和9M82 9A83 - 具有四个面对空飞弹9M83)的;
- 两种类型的puskozaryazhayuschih(9A84 - 到与发射9A82和面对空飞弹和9M82 9A85工作 - 与发射9A83和面对空飞弹9M83工作),以及那些手段。 提供和维护。

9М83和9М82导弹分别在运输发射容器9Я238和9Y240中运行。
防空导弹系统S-300V的头部开发商作为一个整体,开发商指挥所,多通道导弹制导站,雷达站程序审查查明涅米(研究机电研究所),广电部。 副总裁埃夫雷莫夫成为该系统的首席设计师,以及这些基金。
循环审查雷达站的开发由无线电工业部的测量仪器研究所(NIIIP)(原NII-208 GKRE)进行。 项目经理是首席设计师Yu.A. Kuznetsov,然后是GN Golubev。
所有发射装置和启动装载装置均由无线电工业部压缩机工程设计局(GKB KM)(原SKB-203 GKAT,今天 - MKB“Start”)创建。 首席安装设计师 - Yaskin A.I.,然后是Evtushenko V.S.
为更快的装备部队提供高效率 武器 C-300B系统的开发分两个阶段进行。 第一阶段是开发用于处理巡航导弹,Lance和飞毛腿弹道导弹以及空气动力学目标的系统。
在开发的第一阶段创建原型C-300V(不包括雷达方案审查,面对空飞弹9M82和对应的起始和puskozaryazhayuschie安装)在1980-1981年恩巴多边形主弹炮局举行的联合测试国防部(垃圾填埋场Zubarev VV的负责人)。 在S-1983V300名下的1年获得通过。 在生活中的新系统启动了由安徒生JA主持国家委员会
在系统微调发展的第二阶段,以确保对弹道导弹的战斗“潘兴-1A”,“潘兴1B”游荡飞机干扰和范围aeroballistic SRAM目标可达100万。M.
在由新任命的Andersen Yu.A.主持的委员会的监督下,在1985-1986试验场地(Unuchko VR场地的负责人)的国防部XUUM-300的Embeni试验场进行了整个系统的联合试验。 对于S-1988V防空系统地面部队防空部队的装备,它在XNUMX年度全面采用。
ZRS的所有战斗武器都部署在高度机动和载人的车辆上,配备导航设备,相互定位和地形参考统一履带式底盘,由Kirovsky Zavod生产协会开发。 此外,这些底盘用于ACS“牡丹”,并与T-80坦克统一用于各个节点。

团队项目9S457意在控制系统和父母的KP(KP从防空导弹旅)的管理模式和防空的自主操作过程中战斗防空导弹复杂(防空导弹师)C-300V。
用于防空复杂KP导弹防御模式使用雷达方案审查“生姜”弹道导弹“潘兴”和飞机弹道导弹的SRAM,开展雷达数据,管理制度作战行动雷达“生姜”的接待和多站击退攻击检测指导,识别和轨迹,目标为防空导弹的自动分配的基础上,目标的选择,以及发行部门 工作雷达“生姜”检测aeroballistic和弹道目标,干扰方向定位的位置干扰。 指挥所采取措施实现管理的最大程度自动化。
在防空模式指挥所提供多达四个防空导弹综合体(每六个有针对性的渠道)击退斑块检测雷达圆形视图“回顾 - 3”空气动力目标(最大200个),包括发生故障的情况下,产生的眼球和进一步支持运行目标(最大70个),接收从上游数据到CP和多信道导弹制导站识别目的等级(弹道或空气动力学的),纳义伯的选择 更危险的目标。
目标分配周期的命令点(为3秒)确保了向24防空导弹系统发布目标指示。 在使用循环审查的雷达站(审查时间段6秒)时,从接收标记到发出目标指示的指挥所的平均工作时间是17秒。 在Lance弹道导弹的工作期间,发布目标指示的目标范围从80到90公里。 导弹防御模式下指挥所的平均工作时间不超过3秒。
命令发布的所有设备都位于爬虫“834对象”上。 该设备的结构组成的:特殊计算器(计算机),硬件语音和telecode通信线路,后SAM控制(三项工作),设备记录指挥所和作战设备,导航设备,定向越野和地形的结合系统是独立供电,设备生命支持。 方向重量 - 39吨。 计算 - 7人。

雷达全方向“评论-3”(9S15M) - 三坐标相干脉冲雷达探测厘米波段具有频率的瞬时调谐,在仰角平面中的软件的电子波束操纵(1,5h1,5度),在方位角和高通量的天线的电旋转。
该雷达站实施了两种对空域进行定期循环审查的模式,用于检测Lance和Scud类型的空气动力学目标和弹道导弹。
该站的第一模式观察区域是45仰角。 同时,仪器检测范围等于330 km,检查率为12秒。 在240公里的距离处,探测到战斗机的概率是0,5。
在第二种模式下,该站的视野是20仰角,回顾的速度是6秒,仪器距离是150公里。 为了在这种模式下探测弹道导弹,提供了一个程序,用于减慢导弹防御扇区中天线的旋转(大约120度),并将仰角的视角增加到55度。 在这种情况下,更新信息的速度 - 9秒。 在整个仪器范围内可靠地检测到第二模式中的战斗机。 Lance型弹道导弹的探测范围至少为95千,而飞毛腿型导弹至少为115千。
为了增加雷达站在不同方向上的潜力,为了保护它免受无源,有源和组合干扰,提供了另外四个降低天线转速的程序,可以用两种定期检查模式实现。 使用这些程序时信息更新率增加了6秒,减速扇区等于30度。
通过使用具有低和快速天线确保免疫雷达降低到背景水平(大约50分贝)的旁瓣的电平,一个最优滤波和限幅回波自动时间控制接收器增益,三通道自动补偿干扰的非线性移动的目标选择图(自动帐户风速,强度分析和非相干噪声信号聚积),自动消隐mezhobzornym 探测方向的某些区域具有来自本地物体的强烈干扰。 站可以确定轴承(角坐标)噪声干扰的飞机生产堰坝,并将它们提供给S-300V的指挥所。 在强烈干扰的部位包括气象的形成并有自动消隐数据皮卡的可能性。

自动数据采集模式下的循环审查雷达在审查期间提供了最多250的标记发布,其中可能存在高达200标记的目标。
确定目标坐标时的均方误差为:在范围内 - 小于250 m,方位角 - 小于30'的仰角 - 小于35'。
站点分辨率在-400 m范围内,角坐标为1,5°。
循环审查的雷达包括以下设备:
- 天线,是一维平面波导光栅,具有方位角电液旋转软件和高程光束电子扫描;
- 发射装置,由行波管和两个安培(平均功率约为8 kW)制成;
- 在行波管上具有高频放大器的接收器(10-13 W附近的灵敏度);
- 自动数据检索设备;
- 抗干扰装置;
- 基于2规范的计算设备。 电脑;
- 用于确定密码系统的状态的设备;
- 设备导航,定位和地形位置;
- 燃气轮机供电单元,语音和电信通信设备与C-300系统的指挥中心,生命支持设备;
- 自主动力的系统。
不同的设备和安装在工作站上的全方位视图雷达装置跟踪底盘“对象832”。 站重量 - 46吨。 计算 - 4人。
雷达软件审核“生姜” 9S19M2 - 三坐标相干脉冲雷达厘米范围内,具有较高的能源潜力,在两个平面和高通量的电子束转向。

两平面电子扫描光束定期审查期间提出能够确保靶向指挥所系统或具有高速率周期性治疗部门的快速分析(1-2秒)与检测到的标记为他们的联系的轨道和支持高速的跟踪目的。
使用雷达站(约0,5度)的窄天线波束,探测具有线性频率调制,和高压缩比为低脉量信号。 这与风速数字系统cheresperiodnoy补偿和电子扫描自我补偿方案相结合,从杂乱提供高安全性的软件检查站点。
高能量的潜力,这是通过使用在高功率速调管放大器的发送器来实现,结合使用电子束扫描和数字信号处理提供了良好的程度的防噪声干扰的保护。
计划审查的雷达实施了几种运作模式。 其中一种模式用于检测和跟踪潘兴型弹道导弹的头部。 在这种模式下观看区是在-45°至+ 45°的方位,在仰角 - 从26°至75°,范围从75到175公里。 相对于地平线,法线与PAR表面的倾斜角等于35度。 查看搜索部门,给出的两个运行目的,从12,5秒等于14支持。 最大可通过16小径陪同。 每一第二目标的运动参数和坐标传送到该系统的指挥中心。 第二种模式 - 检测和飞机型SRAM弹道导弹和巡航导弹的跟踪与aeroballistic和弹道导弹发射。 在方位角的视场是从-30°至+ 30°,海拔 - 从9°至50°和范围 - 从20到175公里。 运动参数的目的传送到指挥所9S457s频率0,5赫兹。

第三模式 - 检测和进一步的支持空气动力学目的且方向在范围寻找干扰向上100公里。 在方位角的视场是从-30°至+ 30°,海拔从0到50度和以倾斜于水平正常范围PAR 20 175公里 - 15度。 观察方向通过telecode链路站操作者或者从指挥所系统设置。 从指挥所系统与区域的定期审查传入目标指示即自动中断审查,并制定出控制中心的概况后,已更新。 更新率取决于一个给定的搜索区域的尺寸和干扰环境。 同时,它在0,3范围内变化 - 16秒。 检测到的目标坐标传递给指挥所。 RMS目的坐标计算误差范围不高于70米,方位角 - 15“然后抬高 - 12”。
雷达设备放置在履带自走式“对象832”。 重量站 - 44吨。 计算 - 4人。
实施了多渠道制导站9C32:
- 搜索,检测,捕获和空气动力学指标和弹道导弹自动跟踪,根据系统的从指挥所的宗旨和自主地(弹道导弹 - 仅从指挥所数据中心管理);
- 产生和传输上发射推导的坐标和目标坐标瞄准照明站,位于该单元上,以及面对空飞弹从上一目的发射器和puskozaryazhayuschih安装烧制
- 火力控制(puskozaryazhayuschimi和发射)中心(的系统命令分),和独立地。
多通道导弹制导站可同时进行扇区搜索目的(独立或根据CO)和陪12目的,而她可以管理所有的puskozaryazhayuschih和防空导弹系统的发射器,传送给他们必要的恢复和启动12导弹6以信息为目标。 该站同时定期观察表面边缘,可以找到低空飞行的目标。

该站是一个多三维坐标上的宗旨和导弹相干脉冲雷达厘米范围。 雷达必须在通过使用相控天线阵列和专用的基础上创建的波束控制系统站设置两个平面的高能量电势,电子束扫描。 计算机。
测距和测向目的,以及各种类型的探测,其提供某些目标信号的站中使用的单脉冲方法坐标,其具有高的分辨率和精度的衍生物。 在使用数字信号处理的所有模式的站。
在多通道导弹制导站提供两种模式 - 从指挥所自治工作和数据管理中心。 在第一种模式是搜索目的方位部门5°和海拔6°。 二 - 审查部门-30°... + 30在方位和0°°... 18°仰角。 二等分线(方位)安装责任部门±340度内旋转相控天线阵列。
该站使用两种类型的探针信号。 准连续(具有大的不连续脉冲串) - 未调制的,并与在堆叠线性调频。 根据控制中心,查看离线搜索领域以及为目标的自动跟踪用于搜索目的。 仅在离线模式下搜索的情况下应用具有线性频率调制的脉冲信号。
接收信号的处理是通过准最佳滤波器进行的。 上的延迟线的分散体(高压缩率)的形成和处理信号具有内部线性调频进行。 通过进行准连续的信号处理滤波器-korrellyatsionno通过使用窄带滤波器在所接收的信号的中频合并。
搜索,检测,和自动目标跟踪过程中系统管理多通道导弹制导站是一种特殊的计算机。 当自动跟踪误差信号被发送到跟踪坐标在时间坐标评价计算机生成系统,和它们的衍生物。 从这些数据的计算机跟踪环路闭合,并且提供在同步器,光束控制系统的控制信号(代码),以及其他的多台系统。 歧义确定的速度和范围搜索中使用的范围内的衍生物的自动跟踪模式消除准连续信号时。

在MC模式提供了操作过程中的多声道台导弹制导 - 检测战机超过5一千多米,在一个范围内150公里,弹道导弹“兰斯” - 60公里,航空弹道导弹SRAM型 - 80公里,弹道导弹“飞毛腿” - 90公里的“潘兴”头 - 140公里。 从检测时刻到使用运动参数的定义自动跟踪目标,从5秒开始。 (SRAM和Pershing)到11秒 (战斗机)。 在独立模式下运行时,多通道检测站导弹制导战斗机发生在高达140公里的范围内。 判定的目标为在其战斗机自动范围跟踪角位置,速度和范围的标准误差构成5-25米速度 - 0,3-1,5米/秒,在仰角和方位角 - 0,2-2 PDE 对于范围“潘兴”头 - 4 90米,速度 - 1,5-35米/秒,在仰角和方位角 - 0,5-1 PDE 距离分辨率是仰角和方位角100米 - 1°,速度 - 5米/秒。
多通道导弹制导站组成的:
- 基于被动相控天线阵列和具有相位控制波束宽度1°,工作作为“传输”作为它的照射号角辐射发射器和接收在相同的切换接口管的反射信号的天线系统;
- 上链轴线速调管的传输系统中,开发关于13千瓦的平均功率(脉冲功率 - 150千瓦);
- 接收系统具有高频放大器,它提供了高灵敏度 - 到17瓦;
- 两台特殊电脑;
- 光束控制系统;
- 显示系统;
- 主要信号处理设备;
- 自动补偿正交干扰和主天线的天线控制系统;
- 跟踪坐标系;
- 控制和报警系统;
- 带有发射器和系统指挥中心的电视通信系统;
- 导航,定向和地形结合;
- 一个独立电源系统(燃气轮机发电机使用);
- 生命支持系统。
所有上述设备都安装在履带式自行火炮“物体833”上。 重量站 - 44千公斤.. 计算 - 6人。
9A83发射的目的是:
- 运输和准备使用四个表面对空导弹9M83 TPK(传输和推出容器)的存储;
- 自动发射前准备和发射表面对空导弹(与触发或9A83 puskozaryazhayuschey 9A85安装);
- 计算并输出命令在飞行无线电校正软件惯性飞行9M83导弹,以及目标照明连续定向电波的半主动寻多普勒(使用放置在PU照明目标站)的操作。

9A83发射器是能够从1-2秒的间隔提供同时发射前准备和发射两枚导弹的。 防空导弹的发射前准备 - 低于15秒。
充电发射9A83使用puskozaryazhayuschey 9A85安装完成。
在电缆预连接,同时交换设备有自己的发射弹药导弹弹药puskozaryazhayuschey安装 - 高达15秒。
根据经由telecode无线电HQ所发送的多通道导弹制导站,并命令发射提供训练防空导弹,安装在其上的MC的测试天线系统照明站,大约在受影响区域中的入口/出口时的目标信息的生产和显示开始指示符,传输解决方案导弹制导站的任务,发射了两颗导弹,干扰归巢面 - 空导弹的存在的分析结果,以指导站的发射。
导弹发射后,发射器提供发卡行将从中并用它安装puskozaryazhayuschey共轭发射导弹的数量台导弹制导数据。 此外PU行使天线开关和发射照明光站系统命令传输模式无线电校正飞行导弹和目标照明。

9A83发射器包括:
- 在起始位置(装有液压驱动器)设置传输和推出容器的装置;
- 用香料电子设备。 电脑;
- 用于预发射准备防空导弹自导系统的设备;
- 启动自动装置;
- 用于惯性系统的发射前准备的设备;
- 目标的站点照明;
- 导航设备,地形装订和定位;
- 电话通信设备;
- 自动供电系统(燃气轮机发电机);
- 生命支持系统。
所有启动器硬件都安装在830对象跟踪的机箱上。 具有导弹弹药的发射器的总重量 - 47,5 thous.Kg。 计算启动器 - 3人。
9А82发射器设计用于在运输和发射容器中运输和存储两个完全可操作的9М82导弹,并执行发射器执行的操作。 根据PU的9А82的主要特征,结构构造和操作,9А83仅在用于将运输和发射容器转移到起始位置和毛皮的装置方面不同。 该站的一部分突出了目标。 发射器安装在831物体跟踪底盘上。
启动和日志记录工具9XX车辆),以及自动装载。
9-83分钟需要50-60分钟才能加载完整导弹负载的6350АXNUMX发射器。 起重机起重能力为XNUMX kg。
发射充电装置与发射装置的不同之处在于安装起重机代替目标照明站和各种电子设备。 该装置具有连接放置在其上的火箭和9-83发射装置的电缆。 在启动充电装置中,燃气轮机电源装置用柴油机替换。
所有带有防空导弹弹药的设备都位于被跟踪的“835物体”上。 防空导弹系统的发射器和弹药的重量 - 47千公斤。 计算 - 3人。

9А84发射充电站设计用于在2运输发射容器中运输和存储9М82导弹,发射9М82防空导弹,装载9А82发射器,装载该发射器,以及对设备进行自充电。 在其设备中,发射充电设备9А84仅在设备的设计上与9А85不同,用于将运输发射容器放置在起始位置。 根据操作原理和主要特点类似于安装9А85。
9М83防空导弹旨在摧毁巡航导弹(包括低空飞行的ALCM型)和Lance和飞毛腿类型的弹道导弹的飞机(包括对8装置过载和无线电干扰条件下操纵的飞机)。 9М82防空导弹执行了相同的功能,可以击中“潘兴-1A”,“潘兴-1B”,SRAM航空弹道导弹,有效干扰飞机的头部,距离可达100公里。
9М82,9М83防空导弹是两级固体推进导弹,具有第一级气动控制,并根据“携带锥”方案制造。 导弹被安置在运输和发射容器中。 导弹的设计尽可能统一。 主要区别在于9М82使用更高功率的发射级。
导弹的主机单元为9М82和9М83安装了以下车载设备单元:
- 非接触式爆炸装置,自主设备;
- 车载计算设备;
- 惯性控制系统。
弹头防空导弹。
在行进阶段的尾部安装了四个空气动力转向和相同的稳定器。
防空导弹的发射是在运输发射容器的垂直位置进行的,使用位于其中的压力粉末蓄能器。 在导弹退出运输和发射集装箱之后,开始将它们降低到给定角度的过程(涉及八个现有的冲击发动机)。 生产过程在启动阶段完成时完成。 在远区空气动力学目标发射期间,维持器级的发动机启动时延迟达20秒。 与起动发动机完成的时间有关。

在飞行的被动和行进部分,通过偏转四个空气动力学控制表面来控制火箭。 防空导弹瞄准目标或惯性控制系统(比例导航方法,在接近目标归位之前在10秒内转换),或命令惯性控制系统(在飞行的最后三秒内切换到归位)。 当在外罩的重新传输的干扰(响应)的条件下在目标处射击时使用后一种目标定向方法。 惯性控制下导弹的飞行沿着能量最优轨迹前进。 这使得有可能实现极高的导弹射程。
计算装置防空导弹的飞行任务特别介绍。 发射器计算机和飞行期间由归航设备从发射器的发射器接收的无线电命令进行校正。
根据9М82燃烧ZRU控制系统和导航设备的信息进行的归航命令的最佳选择使导弹能够击中小型目标,例如SRAM雪崩弹道导弹和Pershing弹道导弹。
在定向多通道引导站进行拍摄时,主动杂波会通过相应的指示添加到任务中,该指示用于进行设置以确保目标9М82在最远100公里的距离内被击中。 用于0,5-2秒的机载防空导弹。 在会面点之前,一个小组被制定出来,开始在导弹弹头爆炸时沿着滚动滚动火箭,弹头碎片的最大场密度向目标方向飞行。 对于0,3秒 到了会议的目的,一个防空导弹的非接触式爆炸装置被激活,它发出破坏弹头的命令。 由于一次大错,一架防空导弹通过爆炸弹头自毁。


防空导弹的导航设备对无线电校正和导航通道具有高度敏感性,这确保了任何目标导弹的可靠导航头,其距离足以进行交会和破坏。 惯性火箭控制系统通过导航设备确保其输出到捕获点的高精度。
在空袭和预期罢工期间操作C-3002自给式防空系统时,带有圆形雷达雷达站的Lance和Scud导弹审查了该空间,并向系统指挥中心发出了有关探测到的目标的雷达信息。 关于循环审查的雷达站的操作模式的订单和信息是从系统的命令点发送的。 根据获得的数据,指挥所计算了目标的路线,确定了类别(弹道型Lance和飞毛腿或空气动力学)目标及其危险程度,进行了所选射击目标的分配(考虑到防空导弹的战备,就业和弹药)防空导弹综合体)并指示多通道站指导。
搜索,检测和捕获传入数据的多通道引导站,以自动跟踪分配给炮击的目标。 捕获可以手动(由站操作员)或自动完成。 在自动跟踪开始之后,目标的坐标被发送到控件以便与控件的轨迹一起识别。 如有必要,指挥所可以发出多通道指导站取消指令或禁止射击。 指挥所的指示可能具有触发特定目标的优先权标志。 优先标志意味着目标本应该被摧毁。 此外,指挥所可以为导弹的引导站提供一个指示,即通过仰角1,4°和60°的方位角自主搜索在该区域内低空飞行的目标。 自主探测到的低空飞行目标的坐标被转移到指挥所并用指挥所的轨道识别。

在导弹制导站指定9А83发射器捕获目标后,防空导弹系统的指挥官在适当的目标或目标上发射9М83防空导弹。 通过该命令将PU上的照明站的发射器接通到天线的等效物上。 关于此向多通道引导站收到了相应的报告。 根据该站,照明站天线定向在其相控天线阵列的平面的法线方向上。 目标的坐标,它们的衍生物开始从指导的多通道站到达发射器,并且发出命令以在发射器或耦合到它的12发射器上准备9或83-x9М85制导导弹。 在完成操作后,发射器将相关信息发送到导弹制导站。 根据目标的坐标及其从引导站接收的运动参数,发射器计算目标站点的角度和方位角(用于指向照明站天线),预期会合点的坐标,目标进入/离开受影响区域的时间信息,以及飞行任务。防空导弹。
解决会合点问题的结果显示在发射器指挥官的记分牌上,并传送到导弹制导站。 当位于先发制人的受影响区域时,开发了许可证以发射防空导弹。 防空导弹系统的指挥官授权发射,向发射器发出命令以开火(两枚防空导弹或一枚导弹连续齐射),并且发射器指挥官在相应的报告中确认了接收命令。 完成对控制器的操作后,按下“开始”按钮,在SAM上,然后记录射击平面和飞行任务。 从运输发射容器中相继发射了一枚或两枚火箭,并将有关此事的报告传送到多通道站。

C-3002防空导弹系统的主要特点:
1。 空气动力损伤区域:
- 在范围内 - 到100 km;
- 高度 - 从0,025到30 km;
2。 高度弹道目标的破坏区域为1至25 km;
3。 目标命中的最大速度 - 3千米/秒;
4。 分区同时发射的目标数量 - 24;
5。 同时诱导的防空导弹营数量 - 24;
6。 射速 - 1,5秒;
7。 防空导弹发射准备时间为15秒;
8。 从系统转移到战斗模式的时间 - 40秒;
9。 该营的防空导弹(发射器和发射器)的弹药 - 从96到192;
10。 Lance导弹被一枚防空导弹击中的概率9М83 - 0,5..0,65;
11。 用一架防空导弹击中飞机的概率9М83 - 0,7..0,9;
12。 击中“潘兴”号防空导弹9М82 - 0,4..0,6的头部概率;
13。 使用一架防空导弹9М82 - 0,5..0,7击中SRAM的可能性;
C-300系统防空导弹的主要特点(括号内是TPC导弹防御系统的特点):
名称 - 9М83/9М82;
1。 长度 - 7898(8570)/ 9913(10525)mm;
2。 最大直径为915(930)/ 1215(1460)mm;
3。 火箭重量:
- 总计 - 3500(3600)/ 5800(6000)kg;
- 第一阶段 - 2275 / 4635 kg;
- 第二阶段 - 1213 / 1271 kg;
弹头的4.MASS - 150 kg;
5。平均飞行速度 - 1200 / 1800 m / s;
6。 最大过载 - 20单位;
7。 有效行动区的边界:
- 远 - 75 / 100 km;
- 顶部 - 25 / 30 km;
- 近 - 6 / 13 km;
- 较低 - 0,025 / 1 km;
8。 潜在目标获取范围(EPR 0,05m2)GSN - 30 km。
根据开发用于发射防空导弹的命令,照明站的发射器通过喇叭天线通过宽光束切换到辐射模式。 在这种模式下,在根据导弹制导站的数据开发的具有发射器的无线电队的目标的机动的情况下,调整导弹的飞行任务。 当防空导弹到达目标时,发射器切换到窄波束(抛物面天线)并用电磁连续能量照射目标,以便沿导弹的导航设备的速度进行自动夹持和跟踪。 根据目标的坐标,通过无线电校正通道传输到防空导弹,并在火箭上计算,根据控制系统自身坐标的数据,导弹的转弯时刻由滚动确定。 从归航设备的数据计算出旋转角度,该角度为目标提供来自弹头的定向碎片流。 此外,来自导航设备的信息用于半有源无线电保险丝的最终切断 - 非接触式爆炸装置。 在那之后,导弹的控制停止了,导弹弹头爆炸的时刻由无线电保险丝决定。
防空导弹与目标站的目标会议后,排放指令被传送到发射器。 之后,发生照明发射器PU到天线的等效切换。 从导弹制导站到系统指挥所,传递了关于发射器和导弹剩余弹药释放的信息。 指挥所考虑到收到的资料,进一步分发并发布了防空导弹系统的指示。

当系统离线时,雷达程序审查预期撞击弹道导弹“潘兴”,在90 ...... 26度范围内对扇区75度和仰角的方位角进行持续搜索。 根据中心指挥中心的指令,搜索部门在火箭危险方向上发生了变化。 在其附近的任何角度方向上出现标记的情况下,进行重复的光束反转(附加检查)。
如果获得的标记符合轨道开始的标准,则跟踪目标的轨迹,并且在系统KP上发布其轨迹参数。 指挥所比较了来自目标的信息和来自其他来源的可用数据,显示了检测和侦察岗位指标的目标,并且还产生了非凡的自动目标分布。 当选择空闲的防空导弹系统,它给出了目标的炮击一个参考,是考虑到:设计点下降弹道导弹弹头相对复杂的操作模式(BR或空气动力学的目的),存在防空系统的准备开火射击渠道制导导弹9М82。 所有多通道导弹制导站在该系统的指挥所收到关于导弹综合体站点的数据及其状况。 Accept(接受)OC弹道导弹站导弹制导进行开关搜索目标扇区MC,以及两个发射器的指定9A82轰击靶(用制备2 SAM 9M82到每个发射器或puskozaryazhayuschey安装9A84和坐标的平移和MC上发射器) 。
当检测到目标时,多通道导航站切换到其自动跟踪并用DD识别目标的坐标,如果它们一致则给出对指挥所的报告。 根据车站指导进行的识别是在指挥所进行的。 当从该站接收到从导航站向发射器发射两个或一个导弹的命令并且发射前准备工作完成时,发射器指挥官可以发射导弹。 由于弹道导弹的头部可能伴有假目标,因此在指挥所制造了一个头部,目标被射击并带有相应的标志。
当有使用小型空气敌机或弹道导弹SRAM导弹雷达软件的威胁进行定期审查概述空间(方位度60部门和9的海拔50度)的预期影响空气的方向。 这些目标的探测及其轨道的设置与潘兴弹道导弹的方式相同。 但是,在这种情况下,在系统的指挥所,从车站,仅为速度高于每秒300米的目标发出标记和轨道。 在指挥所,进行了目标识别,并选择了防空系统,对其进行射击是最有效的。 与此同时,防空导弹系统可能参与破坏航空弹道导弹,这些导弹属于空气动力学目标模式,但使用9М82作战准备导弹。

主动干扰,游荡的飞机制造商合作在射程可达100公里时指挥所系统给台导弹制导注轨道,这是形成从雷达方案审查或圆形的扫描站的信息。 目标的路线也可以由组合信息形成。 此外,根据来自更高指挥点命令的防空导弹旅的数据,可以从KP系统获得指令。 生产总监采用多通道引导站进行角度坐标自动跟踪,然后向系统指挥中心报告。 反过来,KP组织向该站的干扰机发布有关该范围的信息。 为此目的,数据用于目标范围,然后是指挥所,这是与生产飞机最接近的指挥所。 在导弹制导站,指挥所数据的推断确定了与陪同导演的距离。 将来,该系统的工作方式与空气动力学目的相同。 在启动9A82发出必要发射导弹9M82命令,球队已经与导弹制导站,这是在作业面空导弹广播干扰的迹象,并改变了解决发射前的指导问题。 相对于目标的当前位置进行了指导,而不是先发制人点。 在导弹上,这个命令改变了火箭计算装置操作的算法,确保导弹在目标上的归位,它们之间有很大的距离。 控制系统的其余部分与空气动力学目的相同。
在集中控制模式下,C-3002防空导弹系统由指挥所,目标指定和目标分配由指挥所(Polyana-D4自动控制系统)由防空导弹旅操作。 在该旅中,他们组织了ZRK(防空导弹营),配备了C-300。 该旅不得不从与雷达后指定的自动化控制系统的一个点的命令和控制(自动指挥所)(包括雷达:9S15M - 圆图,9S19M2 - 软件审查1L13 - 待机,以及所述波里-P1 - 点雷达信息处理),三个或四个导弹营。
它们的结构是:指挥控制中心; 9A457启动和充电安装。
C-300前线防空导弹旅的目的是取代克鲁克陆军前线防空导弹旅。

在特殊演习和战斗训练演习期间,C-300 ZRS系统的高机动性和作战能力得到了多次确认。 例如,在防御-92演习期间,C-300B提供了第一枚击败飞机的导弹,弹道导弹最多被两枚导弹摧毁。
C-3002防空导弹系统的诞生是国内重大科技成果,领先于国外设计。
主要是由于C-300B和C-300В1系统联合测试的国家委员会主席的意志品质,组织技能,技术和军事知识,Andersen Yu.A. 成功地测试了系统,客观地评估了系统的能力,并建议它们被SA(地面部队的防空部队)采用。
很难高估许多军事专家和国防工业团队对C-300的发展的贡献。 国家的工作得到了充分的注意。
列宁奖的获奖者是Shebeko V.N.,Prokofiev D.I.,Smirnov V.A.,Chekin G.I.,Epifanov V.N. Efremov V.P.,Vinokurova V.A.,Sprintis E.K.,Zotova Y.Ya.,Gelda L.P.,Kuznetsova Yu.A.,Zgodu V.I.,Sorenkova E.I. 。,HE莲,IF戈卢别夫,AG戈勒,科瓦尔SM,工作NF Kozhukhova YA,IA Bisyarina,Izvekova AI, Barsukov S.A.,Nechaeva V.P.,Volkova I.D.,Duel M.B.,Andersen Yu.A. 和其他人
在无线电工业部的马里机械制造厂科学和生产协会掌握了C-3002计划审查的指挥所,多通道制导站和雷达站的制作。 导弹,发射装置和发射装置制造了无线电工业部的生产协会“以MI Kalinin命名的斯维尔德洛夫斯克机械制造厂”。 由无线电工业部无线电测量装置的Murom工厂进行了循环审查的雷达站的生产。 用于C-300战斗设备的履带式自行火炮由Kirovsky Zavod生产协会提供。 这些企业的集体在掌握这一复杂系统的生产方面投入了大量的创造性工作,这使得C-300®现成技术变得容易,生产样品在世界市场上具有竞争力。
预计在行动期间敌人可以使用320导弹“Lance”,150“中士”和350“Pershing”,其最大射程分别为75,140和740公里。
在1960开始时,Zashchita研究论文首次研究了将其用于防空目的的可能性。 在具有Krug复合体的弹道导弹上进行实验射击,该复合体具有额外的半主动导航通道,其在防空导弹的轨道的最后部分上提供了小的失误。 这些镜头显示了在防空导弹系统的帮助下与中士和兰斯弹道导弹作战的可能性,但为了解决与保护潘兴弹道导弹有关的防空任务,有必要开发基于高潜力雷达制导和目标探测的新一代复合体。 ,以及具有高能量特性的防空导弹。
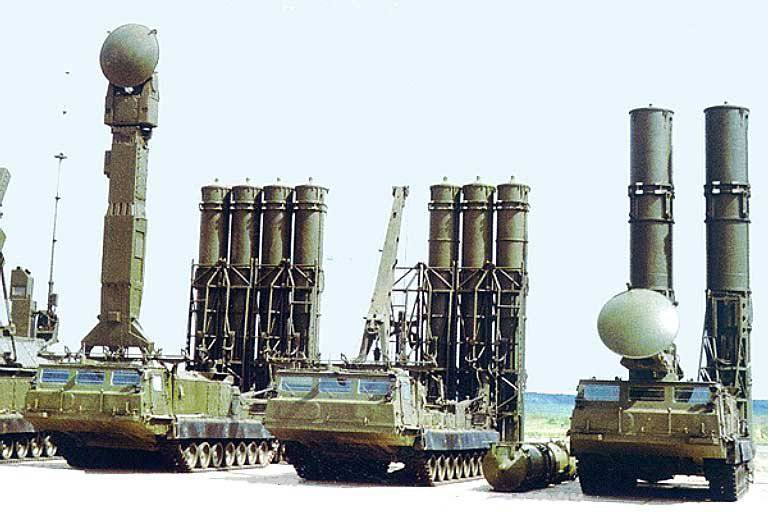
战斗车辆复杂C-300В
在1963-1964的“Binom”研究工作期间,确定地面部队的覆盖最适合联合使用三种类型的先进防空导弹系统,符号为“A”,“B”和“C”。 其中,“A”和“B”将是通用的,能够解决防空和常规防空防御以及后者 - 防空的问题。 与此同时,最好的作战能力,其中“潘兴”导弹能够击中潘兴导弹的导弹的能力应该是在“A”复合体 据推测,对于防空导弹综合体“A”,将开发一种火箭,其大小和质量接近于该综合体的Krug防空导弹,但其平均飞行速度是其两倍并且能够拦截更高海拔的潘兴导弹12千米,具有预期的探测时间并采取弹道目标进行跟踪。 与此同时,即使在1,5 Mt的核爆炸发生爆炸的情况下,生活的公开力量的损失也限制在10百分比的水平,并且考虑到大多数人在不同的避难所和装甲设施中的存在 - 这个值要小得多。
特别困难与弹道目标的检测和目标反导弹(SAM)有关。 这需要创造新一代的高潜力雷达设施。 根据几项实验研究的结果,确定“潘兴”BR的可拆卸头部的EPR与飞机相比要小两个数量级。 随着电力供应的增加,雷达站潜力的增加导致雷达站的质量和尺寸显着增加,这限制了其移动性和机动性。 雷达接收器灵敏度的增加导致噪声抗扰度恶化。 需要折衷的解决方案 - 雷达探测和引导的接收器和发射机功率的可接受的灵敏度。
根据无线电通信局在最重要的一线目标的潜在敌人的第一次打击中预计支出与ABC,确定对于同时类型为“A”的防空导弹系统,至少应同时启动防空模式中的3目标通道。 因此,希望具有多通道和多功能导弹制导站,其在可能的外观,跟踪和发射其中许多反导弹的部分中提供快速自主搜索和探测弹道导弹。 与此同时,防空导弹系统(用于早期探测和目标指定的雷达,多通道制导站,带导弹的发射器)的元件必须具有高度移动性(自行推进,具有导航,定向和地形参考设备,数据传输和通信,具有嵌入式自主电源)。
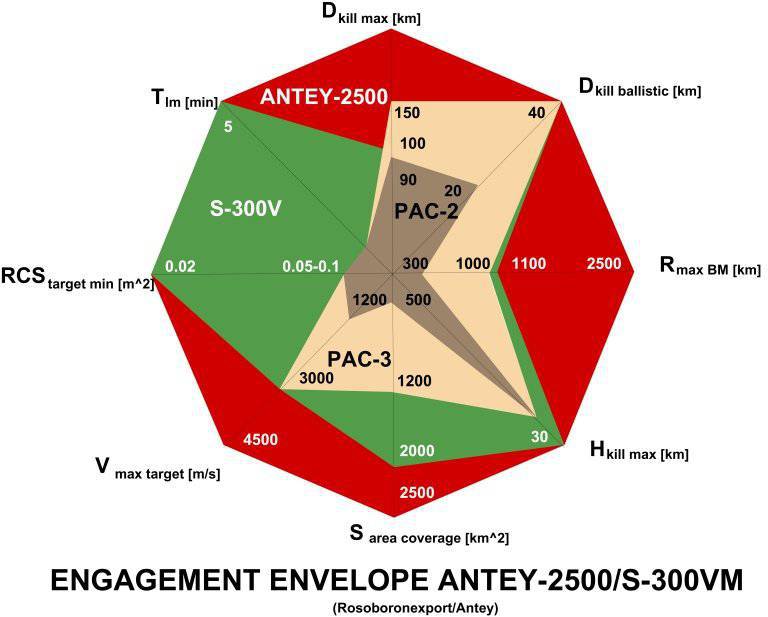
C-300B,C-300BM,“爱国者”PAC-2和PAC-3的对比图
防空导弹站破坏区域远处边界的能力限制取决于多通道导弹制导站的允许重量。 决定将复杂的“ A”型飞机的主要部件安装在越野能力高,总重量小于40-45吨(立交桥和桥梁的越野能力最大)的自行式底盘上。 无法使用可用的设计有轮式底盘作为复杂“ A”的基础,因此重型底盘应该已经成为重型底盘 短歌。 这样就可以定位电子设备(传输,接收,指示器,计算,控制和其他)以及数据传输,通信设备和总重量约20至25吨的自主电源。
作为那些的根本。 多通道引导站解决方案选择了具有无源相控天线阵列(PAR)的厘米波段的相干脉冲雷达。 从发光装置的喇叭发射器执行“在灯上”的工作,其以接收反射信号的模式连接到接收装置。 通过数字波束控制系统执行X射线宽电子束扫描(在仰角和方位角平面中),该数字波束控制系统改变通过包含与该系统相关联的移相器的晶格元件的接收(传输)高频能量的相位。 该系统提供了在方位角上从-1°到-45°的范围内的目标的搜索和跟踪,以及相对于相控天线阵列的平面的法线的仰角,其被设置为与地平线成45度的角度。
以这种方式形成的搜索部门使得探测和配备任何入射角的弹道导弹成为可能,并且还提供了足够覆盖导弹沿被覆物体发射的可能方向(方位角 - 90°)。 搜索和跟踪应该根据一个程序进行,该程序在搜索期间在预期的火箭轨迹方向和地面方向上提供更频繁的光束转向,以便及时检测低空飞行目标。 当目标被射击时 - 朝着这个目标的方向射击并且防空导弹被瞄准它。 通过多通道引导站的波束控制系统和跟踪数字系统(SAM和目标运动延长器)的联合操作来进行伴奏。 该站应该使用单脉冲雷达方法。 为了搜索和检测目标,总辐射方向图和接收设备的相应信道服务;用于跟踪,差分(接收时)和总(辐射)图和接收机输入部分的相应信道。 总辐射图和相应的接收器通道提供了最大的目标检测范围。 在跟踪期间,相同的辐射图案提供了目标的最高辐射能量。 这增加了与接收器差分通道的目标跟踪距离。

命令点9C457
接收器通道和差分辐射图案使得可以获得伴随目标和SAM的角坐标的高精度,这是单脉冲雷达方法中固有的。 在搜索期间,它应该使用更长时间的高能量脉冲。 跟踪期间 - 双离散信号突发,提供高功率,出色的分辨率,良好的跟踪精度和目标(速度和范围)。 所有这些使得可以在站中组合良好的目标跟踪精度和长距离,以提供针对被动和主动干扰的有效保护以及根据动态和信号标志识别目标的能力。 计算表明,当发射机功率10千瓦,接收装置10-14瓦特的敏感性,波束宽度1度多信道指导站防空导弹复杂“A”将确保飞机和弹道导弹上可接受的检测范围覆盖针对攻击机和弹道导弹区根据zour和目标的渠道。
在1965年,根据研究结果,Binom开发了TTZ和关于通用军用A型防空导弹系统设计的初步数据。 该防空导弹系统(密码“棱镜”)的初步设计的开发是在V.Svistov的指导下进行的。 在军事工业综合体的同一决定中,作为Krug-M防空导弹系统的通用版本,在无线电工业部的20研究所。 考虑了两种防空导弹系统的变种。
系统第一版的组成:
1。 指挥所有一个通信枢纽,放置在3-4运输车辆上。
2。 具有相控天线阵列和工作扇区60-70仰角和方位角度的多功能雷达,放置在两个或三个运输单元上。 雷达站必须进行:
- 搜索,捕获和跟踪;
- 识别目标等级(BR或飞机);
- 在假目标的背景下识别弹道导弹的分离弹头;
- 推断弹道导弹的轨迹以确定坠落点;
- 控制背光站,确保1导弹在最终轨道区域自我归位,并发布识别和指挥制导雷达站的目标指定(在初始和中间轨迹站点);
- 在归航头捕获目标之前管理XUR-1轨迹。
3。 用于确定在单个识别系统中操作的目标的状态的站。
4。 目标照明站,确保捕获GOS ZUR-1。
5。 Zour-1的重量为5-7吨,具有组合式制导系统(用于销毁飞机和BR)。
6。 2-3 3,5-XNUMX具有命令引导系统(用于销毁飞机)。
7。 两种类型的发射器(使用ZUR-1和ZUR-2)。
8。 雷达目标识别和指挥指导。
雷达软件评测9C19M2“生姜”
在第二个,该复合体的简化版本没有提供使用归巢的Zur-1。
在Prism综合体中,可以将目标信道的数量带到6(精确定位和识别的雷达站数量增加,以及ZUR-1和-2的发射器数量增加)。
具有三个目标通道的Prism复合体中的车辆总数从25到27单元,这使得复杂的结构变得繁琐且非常昂贵。
但是,解决了在该项目中建立军用防空导弹防御系统的主要问题。
这一结论是在1967的Gran在国防部3研究所设立的专题研究工作“Rhomb”中进行的,其目的是评估棱镜复合体的先进设计,并在此基础上为其开发战术和技术项目。设计工作,以创建SV的反导防御力可接受的成本和结构的复杂性。
尽管棱镜项目“棱镜”通过各种手段过度饱和,但应该指出的是在V.Svistov的指导下开发的。 在研究工作“棱镜”主要技术。 军事反导弹综合体和先进项目的决定首先证明了建立一个普遍的军事综合体的现实。 最初,很难说服军工集团领导人,特别是该国防空系统反导弹防御系统的首席设计师Kisunko GV,他断然否认有可能建立一个基于拟议的V. Svistovym的系统。 解决方案(带有相控天线阵的移动雷达,两个导弹等)。 只有无线电行业部长Kalmykov VD的支持,该国防空部队防空系统的总设计师A. Raspletin。 和Radioprom Chudakov PM的20科学研究所所长 允许保护avanproekt,并创建一个自行式部队防空导弹系统C-300В。
9C15М“Review-3”圆形雷达
另一方面,与此同时,在无线电工业部KB-1的倡议和防空部队的指挥下,该提案被认为是为苏联的三种武装力量-地面部队,防空部队和海军-建立统一的建议。 舰队 -防空SAM-S-500U的最大破坏范围约为100公里。 这符合用棱镜或A型复合体击中飞机的要求。
只是由于武装部队总参谋部科学技术委员会的专心态度,最重要的是R. Valiev。 - 对空防御系统的领导者 - 能够举办一次与客户的这个建议所有类型苏联武装力量的讨论和说服与会者在讨论,而且S-500U的防空部队CB所提出的修改才会发声事件,将能够提供在必要的范围内进行导弹防御。 当时的最后一次并不是海军和该国防空部队所必需的,但是,它需要解决复杂的其他技术问题。
考虑到对苏共中央的C-500U分辨率和部长27.05.1969的苏联部长会议困难建议全面讨论的结果给予了苏联武装部队在一个单一的战术技术要求不亚于同类型,称为C-300的可能统一防空导弹系统的开发。
莫斯科设计局“箭”(广电行业的前KB-1部,后来成为一个科学生产协会“阿尔马兹”)为国家防空S-300P的防空部队创建,船舶工业(后来研究院“牵牛星”)的ER部的研究所创建海军的C-300F综合体和无线电工业部的MIE(原研究所 - 无线电工业部的20,后来进入Antey科学和生产协会)创建了C-300通用防空和反导系统 地面部队的防空。
9C32导弹制导站
据设想,对于从25到25千米高度飞行的目标的防空防御,速度高达3,5千公里/小时,范围为6 - 75 km,莫斯科设计局Fakel将使用所有统一的综合体。 Minradioprom(首席设计师Grushin V.P.)Zur B-500Р拥有综合制导系统。 在第一阶段,创建了一个简化且更便宜的B-500K导弹防御系统,该系统具有无线电指令制导系统,可在远至50千米的距离内使用。
斯维尔德洛夫斯克机械设计局Novator MAP(设计局300 GKAT,首席设计师Lyulev LV,当时的Smirnov VA)专门开发了KS-8火箭,以摧毁目标高度96千米。与此同时,覆盖了潘兴导弹的35 km300区域。
但是,无法实现C-300防空导弹系统的深度统一。 在C-300P和C-300系统中,大约50百分比在功能设备层面统一,只有雷达站检测到指挥所。 在海军的防空系统和该国的防空部队中,使用了由Grushin PD开发的单一防空导弹。
C-300V在开发过程中的创造者已经放弃使用由两个不同设计局开发的防空导弹。 优先考虑火箭Lyulyeva L.V.的防空版本。
物业及设备改造C-300武装部队的不同分支(除雷达全向系统S-300P和C-300V创建NIIIP MCI和莫斯科设计局“火炬” MAP开发面空导弹的S-300F和C-300P)开发各种工业企业使用其组件和技术,为这些设施提供客户(车队,部队,国防)的各种运营要求。
八十年代末,C-300P防空导弹系统开发商和客户确信需要一个通用的移动防空导弹系统,以确保保护领土防空设施免受战术弹道导弹的攻击。 这是开始创建这样一个系统的工作的动力,该系统被命名为C-300PMU。

启动器9A83
科走式与对C-300V的C-300,局部战术技术要求的共同(共享)战术技术要求研制的防空导弹系统C-300V,增加为C-300V的战术技术要求,补充战术用于雷达“审查-3”,其被用作在系统上的雷达轮视图的技术要求,对一个雷达站方案审查“生姜”的发展职权范围,以及其上的修正。
根据S-300V防空系统的战术和技术要求,它被认为是一线防空武器,旨在销毁巡航导弹,陆基弹道导弹(潘兴,兰斯)和航空(SRAM),禁止活动干扰机,飞机战术和战略 航空,在困难的干扰和空中情况下,在指示的攻击手段大量使用的条件下作战直升机,同时由掩护部队进行机动作战。 设想使用两种类型的导弹:
- 9М82用于对Pershing弹道导弹,SRAM飞机弹道导弹,在相当远的飞机上采取行动;
- 9М83用于击中弹道导弹Lance和P-17(飞毛腿),空气动力学目标。
防空导弹系统C-300(9K81)的组成包括:
- 指挥所9С457,循环审查雷达站“Review-3”(9СXNNXXМ);
- 雷达软件审核“姜”(9S19M2),用于探测弹道导弹弹头“潘兴”导弹aeroballistic SRAM,在100万平方米的距离游荡,董事飞机。
- 四个防空导弹综合体。
每个防空导弹系统包括:
- 多通道台导弹导弹9C32;
- 两种类型的发射器(9A82 - 具有两个面对空飞弹和9M82 9A83 - 具有四个面对空飞弹9M83)的;
- 两种类型的puskozaryazhayuschih(9A84 - 到与发射9A82和面对空飞弹和9M82 9A85工作 - 与发射9A83和面对空飞弹9M83工作),以及那些手段。 提供和维护。
9М82(9М82М)和9М83(9М83М)防空导弹
9М83和9М82导弹分别在运输发射容器9Я238和9Y240中运行。
防空导弹系统S-300V的头部开发商作为一个整体,开发商指挥所,多通道导弹制导站,雷达站程序审查查明涅米(研究机电研究所),广电部。 副总裁埃夫雷莫夫成为该系统的首席设计师,以及这些基金。
循环审查雷达站的开发由无线电工业部的测量仪器研究所(NIIIP)(原NII-208 GKRE)进行。 项目经理是首席设计师Yu.A. Kuznetsov,然后是GN Golubev。
所有发射装置和启动装载装置均由无线电工业部压缩机工程设计局(GKB KM)(原SKB-203 GKAT,今天 - MKB“Start”)创建。 首席安装设计师 - Yaskin A.I.,然后是Evtushenko V.S.
为更快的装备部队提供高效率 武器 C-300B系统的开发分两个阶段进行。 第一阶段是开发用于处理巡航导弹,Lance和飞毛腿弹道导弹以及空气动力学目标的系统。
在开发的第一阶段创建原型C-300V(不包括雷达方案审查,面对空飞弹9M82和对应的起始和puskozaryazhayuschie安装)在1980-1981年恩巴多边形主弹炮局举行的联合测试国防部(垃圾填埋场Zubarev VV的负责人)。 在S-1983V300名下的1年获得通过。 在生活中的新系统启动了由安徒生JA主持国家委员会
在系统微调发展的第二阶段,以确保对弹道导弹的战斗“潘兴-1A”,“潘兴1B”游荡飞机干扰和范围aeroballistic SRAM目标可达100万。M.
在由新任命的Andersen Yu.A.主持的委员会的监督下,在1985-1986试验场地(Unuchko VR场地的负责人)的国防部XUUM-300的Embeni试验场进行了整个系统的联合试验。 对于S-1988V防空系统地面部队防空部队的装备,它在XNUMX年度全面采用。
ZRS的所有战斗武器都部署在高度机动和载人的车辆上,配备导航设备,相互定位和地形参考统一履带式底盘,由Kirovsky Zavod生产协会开发。 此外,这些底盘用于ACS“牡丹”,并与T-80坦克统一用于各个节点。

入门充电器9А84
团队项目9S457意在控制系统和父母的KP(KP从防空导弹旅)的管理模式和防空的自主操作过程中战斗防空导弹复杂(防空导弹师)C-300V。
用于防空复杂KP导弹防御模式使用雷达方案审查“生姜”弹道导弹“潘兴”和飞机弹道导弹的SRAM,开展雷达数据,管理制度作战行动雷达“生姜”的接待和多站击退攻击检测指导,识别和轨迹,目标为防空导弹的自动分配的基础上,目标的选择,以及发行部门 工作雷达“生姜”检测aeroballistic和弹道目标,干扰方向定位的位置干扰。 指挥所采取措施实现管理的最大程度自动化。
在防空模式指挥所提供多达四个防空导弹综合体(每六个有针对性的渠道)击退斑块检测雷达圆形视图“回顾 - 3”空气动力目标(最大200个),包括发生故障的情况下,产生的眼球和进一步支持运行目标(最大70个),接收从上游数据到CP和多信道导弹制导站识别目的等级(弹道或空气动力学的),纳义伯的选择 更危险的目标。
目标分配周期的命令点(为3秒)确保了向24防空导弹系统发布目标指示。 在使用循环审查的雷达站(审查时间段6秒)时,从接收标记到发出目标指示的指挥所的平均工作时间是17秒。 在Lance弹道导弹的工作期间,发布目标指示的目标范围从80到90公里。 导弹防御模式下指挥所的平均工作时间不超过3秒。
命令发布的所有设备都位于爬虫“834对象”上。 该设备的结构组成的:特殊计算器(计算机),硬件语音和telecode通信线路,后SAM控制(三项工作),设备记录指挥所和作战设备,导航设备,定向越野和地形的结合系统是独立供电,设备生命支持。 方向重量 - 39吨。 计算 - 7人。

雷达全方向“评论-3”(9S15M) - 三坐标相干脉冲雷达探测厘米波段具有频率的瞬时调谐,在仰角平面中的软件的电子波束操纵(1,5h1,5度),在方位角和高通量的天线的电旋转。
该雷达站实施了两种对空域进行定期循环审查的模式,用于检测Lance和Scud类型的空气动力学目标和弹道导弹。
该站的第一模式观察区域是45仰角。 同时,仪器检测范围等于330 km,检查率为12秒。 在240公里的距离处,探测到战斗机的概率是0,5。
在第二种模式下,该站的视野是20仰角,回顾的速度是6秒,仪器距离是150公里。 为了在这种模式下探测弹道导弹,提供了一个程序,用于减慢导弹防御扇区中天线的旋转(大约120度),并将仰角的视角增加到55度。 在这种情况下,更新信息的速度 - 9秒。 在整个仪器范围内可靠地检测到第二模式中的战斗机。 Lance型弹道导弹的探测范围至少为95千,而飞毛腿型导弹至少为115千。
为了增加雷达站在不同方向上的潜力,为了保护它免受无源,有源和组合干扰,提供了另外四个降低天线转速的程序,可以用两种定期检查模式实现。 使用这些程序时信息更新率增加了6秒,减速扇区等于30度。
通过使用具有低和快速天线确保免疫雷达降低到背景水平(大约50分贝)的旁瓣的电平,一个最优滤波和限幅回波自动时间控制接收器增益,三通道自动补偿干扰的非线性移动的目标选择图(自动帐户风速,强度分析和非相干噪声信号聚积),自动消隐mezhobzornym 探测方向的某些区域具有来自本地物体的强烈干扰。 站可以确定轴承(角坐标)噪声干扰的飞机生产堰坝,并将它们提供给S-300V的指挥所。 在强烈干扰的部位包括气象的形成并有自动消隐数据皮卡的可能性。

自动数据采集模式下的循环审查雷达在审查期间提供了最多250的标记发布,其中可能存在高达200标记的目标。
确定目标坐标时的均方误差为:在范围内 - 小于250 m,方位角 - 小于30'的仰角 - 小于35'。
站点分辨率在-400 m范围内,角坐标为1,5°。
循环审查的雷达包括以下设备:
- 天线,是一维平面波导光栅,具有方位角电液旋转软件和高程光束电子扫描;
- 发射装置,由行波管和两个安培(平均功率约为8 kW)制成;
- 在行波管上具有高频放大器的接收器(10-13 W附近的灵敏度);
- 自动数据检索设备;
- 抗干扰装置;
- 基于2规范的计算设备。 电脑;
- 用于确定密码系统的状态的设备;
- 设备导航,定位和地形位置;
- 燃气轮机供电单元,语音和电信通信设备与C-300系统的指挥中心,生命支持设备;
- 自主动力的系统。
不同的设备和安装在工作站上的全方位视图雷达装置跟踪底盘“对象832”。 站重量 - 46吨。 计算 - 4人。
雷达软件审核“生姜” 9S19M2 - 三坐标相干脉冲雷达厘米范围内,具有较高的能源潜力,在两个平面和高通量的电子束转向。

两平面电子扫描光束定期审查期间提出能够确保靶向指挥所系统或具有高速率周期性治疗部门的快速分析(1-2秒)与检测到的标记为他们的联系的轨道和支持高速的跟踪目的。
使用雷达站(约0,5度)的窄天线波束,探测具有线性频率调制,和高压缩比为低脉量信号。 这与风速数字系统cheresperiodnoy补偿和电子扫描自我补偿方案相结合,从杂乱提供高安全性的软件检查站点。
高能量的潜力,这是通过使用在高功率速调管放大器的发送器来实现,结合使用电子束扫描和数字信号处理提供了良好的程度的防噪声干扰的保护。
计划审查的雷达实施了几种运作模式。 其中一种模式用于检测和跟踪潘兴型弹道导弹的头部。 在这种模式下观看区是在-45°至+ 45°的方位,在仰角 - 从26°至75°,范围从75到175公里。 相对于地平线,法线与PAR表面的倾斜角等于35度。 查看搜索部门,给出的两个运行目的,从12,5秒等于14支持。 最大可通过16小径陪同。 每一第二目标的运动参数和坐标传送到该系统的指挥中心。 第二种模式 - 检测和飞机型SRAM弹道导弹和巡航导弹的跟踪与aeroballistic和弹道导弹发射。 在方位角的视场是从-30°至+ 30°,海拔 - 从9°至50°和范围 - 从20到175公里。 运动参数的目的传送到指挥所9S457s频率0,5赫兹。
第三模式 - 检测和进一步的支持空气动力学目的且方向在范围寻找干扰向上100公里。 在方位角的视场是从-30°至+ 30°,海拔从0到50度和以倾斜于水平正常范围PAR 20 175公里 - 15度。 观察方向通过telecode链路站操作者或者从指挥所系统设置。 从指挥所系统与区域的定期审查传入目标指示即自动中断审查,并制定出控制中心的概况后,已更新。 更新率取决于一个给定的搜索区域的尺寸和干扰环境。 同时,它在0,3范围内变化 - 16秒。 检测到的目标坐标传递给指挥所。 RMS目的坐标计算误差范围不高于70米,方位角 - 15“然后抬高 - 12”。
雷达设备放置在履带自走式“对象832”。 重量站 - 44吨。 计算 - 4人。
实施了多渠道制导站9C32:
- 搜索,检测,捕获和空气动力学指标和弹道导弹自动跟踪,根据系统的从指挥所的宗旨和自主地(弹道导弹 - 仅从指挥所数据中心管理);
- 产生和传输上发射推导的坐标和目标坐标瞄准照明站,位于该单元上,以及面对空飞弹从上一目的发射器和puskozaryazhayuschih安装烧制
- 火力控制(puskozaryazhayuschimi和发射)中心(的系统命令分),和独立地。
多通道导弹制导站可同时进行扇区搜索目的(独立或根据CO)和陪12目的,而她可以管理所有的puskozaryazhayuschih和防空导弹系统的发射器,传送给他们必要的恢复和启动12导弹6以信息为目标。 该站同时定期观察表面边缘,可以找到低空飞行的目标。
该站是一个多三维坐标上的宗旨和导弹相干脉冲雷达厘米范围。 雷达必须在通过使用相控天线阵列和专用的基础上创建的波束控制系统站设置两个平面的高能量电势,电子束扫描。 计算机。
测距和测向目的,以及各种类型的探测,其提供某些目标信号的站中使用的单脉冲方法坐标,其具有高的分辨率和精度的衍生物。 在使用数字信号处理的所有模式的站。
在多通道导弹制导站提供两种模式 - 从指挥所自治工作和数据管理中心。 在第一种模式是搜索目的方位部门5°和海拔6°。 二 - 审查部门-30°... + 30在方位和0°°... 18°仰角。 二等分线(方位)安装责任部门±340度内旋转相控天线阵列。
该站使用两种类型的探针信号。 准连续(具有大的不连续脉冲串) - 未调制的,并与在堆叠线性调频。 根据控制中心,查看离线搜索领域以及为目标的自动跟踪用于搜索目的。 仅在离线模式下搜索的情况下应用具有线性频率调制的脉冲信号。
接收信号的处理是通过准最佳滤波器进行的。 上的延迟线的分散体(高压缩率)的形成和处理信号具有内部线性调频进行。 通过进行准连续的信号处理滤波器-korrellyatsionno通过使用窄带滤波器在所接收的信号的中频合并。
搜索,检测,和自动目标跟踪过程中系统管理多通道导弹制导站是一种特殊的计算机。 当自动跟踪误差信号被发送到跟踪坐标在时间坐标评价计算机生成系统,和它们的衍生物。 从这些数据的计算机跟踪环路闭合,并且提供在同步器,光束控制系统的控制信号(代码),以及其他的多台系统。 歧义确定的速度和范围搜索中使用的范围内的衍生物的自动跟踪模式消除准连续信号时。

在MC模式提供了操作过程中的多声道台导弹制导 - 检测战机超过5一千多米,在一个范围内150公里,弹道导弹“兰斯” - 60公里,航空弹道导弹SRAM型 - 80公里,弹道导弹“飞毛腿” - 90公里的“潘兴”头 - 140公里。 从检测时刻到使用运动参数的定义自动跟踪目标,从5秒开始。 (SRAM和Pershing)到11秒 (战斗机)。 在独立模式下运行时,多通道检测站导弹制导战斗机发生在高达140公里的范围内。 判定的目标为在其战斗机自动范围跟踪角位置,速度和范围的标准误差构成5-25米速度 - 0,3-1,5米/秒,在仰角和方位角 - 0,2-2 PDE 对于范围“潘兴”头 - 4 90米,速度 - 1,5-35米/秒,在仰角和方位角 - 0,5-1 PDE 距离分辨率是仰角和方位角100米 - 1°,速度 - 5米/秒。
多通道导弹制导站组成的:
- 基于被动相控天线阵列和具有相位控制波束宽度1°,工作作为“传输”作为它的照射号角辐射发射器和接收在相同的切换接口管的反射信号的天线系统;
- 上链轴线速调管的传输系统中,开发关于13千瓦的平均功率(脉冲功率 - 150千瓦);
- 接收系统具有高频放大器,它提供了高灵敏度 - 到17瓦;
- 两台特殊电脑;
- 光束控制系统;
- 显示系统;
- 主要信号处理设备;
- 自动补偿正交干扰和主天线的天线控制系统;
- 跟踪坐标系;
- 控制和报警系统;
- 带有发射器和系统指挥中心的电视通信系统;
- 导航,定向和地形结合;
- 一个独立电源系统(燃气轮机发电机使用);
- 生命支持系统。
所有上述设备都安装在履带式自行火炮“物体833”上。 重量站 - 44千公斤.. 计算 - 6人。
9A83发射的目的是:
- 运输和准备使用四个表面对空导弹9M83 TPK(传输和推出容器)的存储;
- 自动发射前准备和发射表面对空导弹(与触发或9A83 puskozaryazhayuschey 9A85安装);
- 计算并输出命令在飞行无线电校正软件惯性飞行9M83导弹,以及目标照明连续定向电波的半主动寻多普勒(使用放置在PU照明目标站)的操作。

9A83发射器是能够从1-2秒的间隔提供同时发射前准备和发射两枚导弹的。 防空导弹的发射前准备 - 低于15秒。
充电发射9A83使用puskozaryazhayuschey 9A85安装完成。
在电缆预连接,同时交换设备有自己的发射弹药导弹弹药puskozaryazhayuschey安装 - 高达15秒。
根据经由telecode无线电HQ所发送的多通道导弹制导站,并命令发射提供训练防空导弹,安装在其上的MC的测试天线系统照明站,大约在受影响区域中的入口/出口时的目标信息的生产和显示开始指示符,传输解决方案导弹制导站的任务,发射了两颗导弹,干扰归巢面 - 空导弹的存在的分析结果,以指导站的发射。
导弹发射后,发射器提供发卡行将从中并用它安装puskozaryazhayuschey共轭发射导弹的数量台导弹制导数据。 此外PU行使天线开关和发射照明光站系统命令传输模式无线电校正飞行导弹和目标照明。

9A83发射器包括:
- 在起始位置(装有液压驱动器)设置传输和推出容器的装置;
- 用香料电子设备。 电脑;
- 用于预发射准备防空导弹自导系统的设备;
- 启动自动装置;
- 用于惯性系统的发射前准备的设备;
- 目标的站点照明;
- 导航设备,地形装订和定位;
- 电话通信设备;
- 自动供电系统(燃气轮机发电机);
- 生命支持系统。
所有启动器硬件都安装在830对象跟踪的机箱上。 具有导弹弹药的发射器的总重量 - 47,5 thous.Kg。 计算启动器 - 3人。
9А82发射器设计用于在运输和发射容器中运输和存储两个完全可操作的9М82导弹,并执行发射器执行的操作。 根据PU的9А82的主要特征,结构构造和操作,9А83仅在用于将运输和发射容器转移到起始位置和毛皮的装置方面不同。 该站的一部分突出了目标。 发射器安装在831物体跟踪底盘上。
启动和日志记录工具9XX车辆),以及自动装载。
9-83分钟需要50-60分钟才能加载完整导弹负载的6350АXNUMX发射器。 起重机起重能力为XNUMX kg。
发射充电装置与发射装置的不同之处在于安装起重机代替目标照明站和各种电子设备。 该装置具有连接放置在其上的火箭和9-83发射装置的电缆。 在启动充电装置中,燃气轮机电源装置用柴油机替换。
所有带有防空导弹弹药的设备都位于被跟踪的“835物体”上。 防空导弹系统的发射器和弹药的重量 - 47千公斤。 计算 - 3人。

9А84发射充电站设计用于在2运输发射容器中运输和存储9М82导弹,发射9М82防空导弹,装载9А82发射器,装载该发射器,以及对设备进行自充电。 在其设备中,发射充电设备9А84仅在设备的设计上与9А85不同,用于将运输发射容器放置在起始位置。 根据操作原理和主要特点类似于安装9А85。
9М83防空导弹旨在摧毁巡航导弹(包括低空飞行的ALCM型)和Lance和飞毛腿类型的弹道导弹的飞机(包括对8装置过载和无线电干扰条件下操纵的飞机)。 9М82防空导弹执行了相同的功能,可以击中“潘兴-1A”,“潘兴-1B”,SRAM航空弹道导弹,有效干扰飞机的头部,距离可达100公里。
9М82,9М83防空导弹是两级固体推进导弹,具有第一级气动控制,并根据“携带锥”方案制造。 导弹被安置在运输和发射容器中。 导弹的设计尽可能统一。 主要区别在于9М82使用更高功率的发射级。
导弹的主机单元为9М82和9М83安装了以下车载设备单元:
- 非接触式爆炸装置,自主设备;
- 车载计算设备;
- 惯性控制系统。
弹头防空导弹。
在行进阶段的尾部安装了四个空气动力转向和相同的稳定器。
防空导弹的发射是在运输发射容器的垂直位置进行的,使用位于其中的压力粉末蓄能器。 在导弹退出运输和发射集装箱之后,开始将它们降低到给定角度的过程(涉及八个现有的冲击发动机)。 生产过程在启动阶段完成时完成。 在远区空气动力学目标发射期间,维持器级的发动机启动时延迟达20秒。 与起动发动机完成的时间有关。

在飞行的被动和行进部分,通过偏转四个空气动力学控制表面来控制火箭。 防空导弹瞄准目标或惯性控制系统(比例导航方法,在接近目标归位之前在10秒内转换),或命令惯性控制系统(在飞行的最后三秒内切换到归位)。 当在外罩的重新传输的干扰(响应)的条件下在目标处射击时使用后一种目标定向方法。 惯性控制下导弹的飞行沿着能量最优轨迹前进。 这使得有可能实现极高的导弹射程。
计算装置防空导弹的飞行任务特别介绍。 发射器计算机和飞行期间由归航设备从发射器的发射器接收的无线电命令进行校正。
根据9М82燃烧ZRU控制系统和导航设备的信息进行的归航命令的最佳选择使导弹能够击中小型目标,例如SRAM雪崩弹道导弹和Pershing弹道导弹。
在定向多通道引导站进行拍摄时,主动杂波会通过相应的指示添加到任务中,该指示用于进行设置以确保目标9М82在最远100公里的距离内被击中。 用于0,5-2秒的机载防空导弹。 在会面点之前,一个小组被制定出来,开始在导弹弹头爆炸时沿着滚动滚动火箭,弹头碎片的最大场密度向目标方向飞行。 对于0,3秒 到了会议的目的,一个防空导弹的非接触式爆炸装置被激活,它发出破坏弹头的命令。 由于一次大错,一架防空导弹通过爆炸弹头自毁。


防空导弹的导航设备对无线电校正和导航通道具有高度敏感性,这确保了任何目标导弹的可靠导航头,其距离足以进行交会和破坏。 惯性火箭控制系统通过导航设备确保其输出到捕获点的高精度。
在空袭和预期罢工期间操作C-3002自给式防空系统时,带有圆形雷达雷达站的Lance和Scud导弹审查了该空间,并向系统指挥中心发出了有关探测到的目标的雷达信息。 关于循环审查的雷达站的操作模式的订单和信息是从系统的命令点发送的。 根据获得的数据,指挥所计算了目标的路线,确定了类别(弹道型Lance和飞毛腿或空气动力学)目标及其危险程度,进行了所选射击目标的分配(考虑到防空导弹的战备,就业和弹药)防空导弹综合体)并指示多通道站指导。
搜索,检测和捕获传入数据的多通道引导站,以自动跟踪分配给炮击的目标。 捕获可以手动(由站操作员)或自动完成。 在自动跟踪开始之后,目标的坐标被发送到控件以便与控件的轨迹一起识别。 如有必要,指挥所可以发出多通道指导站取消指令或禁止射击。 指挥所的指示可能具有触发特定目标的优先权标志。 优先标志意味着目标本应该被摧毁。 此外,指挥所可以为导弹的引导站提供一个指示,即通过仰角1,4°和60°的方位角自主搜索在该区域内低空飞行的目标。 自主探测到的低空飞行目标的坐标被转移到指挥所并用指挥所的轨道识别。

在导弹制导站指定9А83发射器捕获目标后,防空导弹系统的指挥官在适当的目标或目标上发射9М83防空导弹。 通过该命令将PU上的照明站的发射器接通到天线的等效物上。 关于此向多通道引导站收到了相应的报告。 根据该站,照明站天线定向在其相控天线阵列的平面的法线方向上。 目标的坐标,它们的衍生物开始从指导的多通道站到达发射器,并且发出命令以在发射器或耦合到它的12发射器上准备9或83-x9М85制导导弹。 在完成操作后,发射器将相关信息发送到导弹制导站。 根据目标的坐标及其从引导站接收的运动参数,发射器计算目标站点的角度和方位角(用于指向照明站天线),预期会合点的坐标,目标进入/离开受影响区域的时间信息,以及飞行任务。防空导弹。
解决会合点问题的结果显示在发射器指挥官的记分牌上,并传送到导弹制导站。 当位于先发制人的受影响区域时,开发了许可证以发射防空导弹。 防空导弹系统的指挥官授权发射,向发射器发出命令以开火(两枚防空导弹或一枚导弹连续齐射),并且发射器指挥官在相应的报告中确认了接收命令。 完成对控制器的操作后,按下“开始”按钮,在SAM上,然后记录射击平面和飞行任务。 从运输发射容器中相继发射了一枚或两枚火箭,并将有关此事的报告传送到多通道站。

C-3002防空导弹系统的主要特点:
1。 空气动力损伤区域:
- 在范围内 - 到100 km;
- 高度 - 从0,025到30 km;
2。 高度弹道目标的破坏区域为1至25 km;
3。 目标命中的最大速度 - 3千米/秒;
4。 分区同时发射的目标数量 - 24;
5。 同时诱导的防空导弹营数量 - 24;
6。 射速 - 1,5秒;
7。 防空导弹发射准备时间为15秒;
8。 从系统转移到战斗模式的时间 - 40秒;
9。 该营的防空导弹(发射器和发射器)的弹药 - 从96到192;
10。 Lance导弹被一枚防空导弹击中的概率9М83 - 0,5..0,65;
11。 用一架防空导弹击中飞机的概率9М83 - 0,7..0,9;
12。 击中“潘兴”号防空导弹9М82 - 0,4..0,6的头部概率;
13。 使用一架防空导弹9М82 - 0,5..0,7击中SRAM的可能性;
C-300系统防空导弹的主要特点(括号内是TPC导弹防御系统的特点):
名称 - 9М83/9М82;
1。 长度 - 7898(8570)/ 9913(10525)mm;
2。 最大直径为915(930)/ 1215(1460)mm;
3。 火箭重量:
- 总计 - 3500(3600)/ 5800(6000)kg;
- 第一阶段 - 2275 / 4635 kg;
- 第二阶段 - 1213 / 1271 kg;
弹头的4.MASS - 150 kg;
5。平均飞行速度 - 1200 / 1800 m / s;
6。 最大过载 - 20单位;
7。 有效行动区的边界:
- 远 - 75 / 100 km;
- 顶部 - 25 / 30 km;
- 近 - 6 / 13 km;
- 较低 - 0,025 / 1 km;
8。 潜在目标获取范围(EPR 0,05m2)GSN - 30 km。
根据开发用于发射防空导弹的命令,照明站的发射器通过喇叭天线通过宽光束切换到辐射模式。 在这种模式下,在根据导弹制导站的数据开发的具有发射器的无线电队的目标的机动的情况下,调整导弹的飞行任务。 当防空导弹到达目标时,发射器切换到窄波束(抛物面天线)并用电磁连续能量照射目标,以便沿导弹的导航设备的速度进行自动夹持和跟踪。 根据目标的坐标,通过无线电校正通道传输到防空导弹,并在火箭上计算,根据控制系统自身坐标的数据,导弹的转弯时刻由滚动确定。 从归航设备的数据计算出旋转角度,该角度为目标提供来自弹头的定向碎片流。 此外,来自导航设备的信息用于半有源无线电保险丝的最终切断 - 非接触式爆炸装置。 在那之后,导弹的控制停止了,导弹弹头爆炸的时刻由无线电保险丝决定。
防空导弹与目标站的目标会议后,排放指令被传送到发射器。 之后,发生照明发射器PU到天线的等效切换。 从导弹制导站到系统指挥所,传递了关于发射器和导弹剩余弹药释放的信息。 指挥所考虑到收到的资料,进一步分发并发布了防空导弹系统的指示。

当系统离线时,雷达程序审查预期撞击弹道导弹“潘兴”,在90 ...... 26度范围内对扇区75度和仰角的方位角进行持续搜索。 根据中心指挥中心的指令,搜索部门在火箭危险方向上发生了变化。 在其附近的任何角度方向上出现标记的情况下,进行重复的光束反转(附加检查)。
如果获得的标记符合轨道开始的标准,则跟踪目标的轨迹,并且在系统KP上发布其轨迹参数。 指挥所比较了来自目标的信息和来自其他来源的可用数据,显示了检测和侦察岗位指标的目标,并且还产生了非凡的自动目标分布。 当选择空闲的防空导弹系统,它给出了目标的炮击一个参考,是考虑到:设计点下降弹道导弹弹头相对复杂的操作模式(BR或空气动力学的目的),存在防空系统的准备开火射击渠道制导导弹9М82。 所有多通道导弹制导站在该系统的指挥所收到关于导弹综合体站点的数据及其状况。 Accept(接受)OC弹道导弹站导弹制导进行开关搜索目标扇区MC,以及两个发射器的指定9A82轰击靶(用制备2 SAM 9M82到每个发射器或puskozaryazhayuschey安装9A84和坐标的平移和MC上发射器) 。
当检测到目标时,多通道导航站切换到其自动跟踪并用DD识别目标的坐标,如果它们一致则给出对指挥所的报告。 根据车站指导进行的识别是在指挥所进行的。 当从该站接收到从导航站向发射器发射两个或一个导弹的命令并且发射前准备工作完成时,发射器指挥官可以发射导弹。 由于弹道导弹的头部可能伴有假目标,因此在指挥所制造了一个头部,目标被射击并带有相应的标志。
当有使用小型空气敌机或弹道导弹SRAM导弹雷达软件的威胁进行定期审查概述空间(方位度60部门和9的海拔50度)的预期影响空气的方向。 这些目标的探测及其轨道的设置与潘兴弹道导弹的方式相同。 但是,在这种情况下,在系统的指挥所,从车站,仅为速度高于每秒300米的目标发出标记和轨道。 在指挥所,进行了目标识别,并选择了防空系统,对其进行射击是最有效的。 与此同时,防空导弹系统可能参与破坏航空弹道导弹,这些导弹属于空气动力学目标模式,但使用9М82作战准备导弹。

主动干扰,游荡的飞机制造商合作在射程可达100公里时指挥所系统给台导弹制导注轨道,这是形成从雷达方案审查或圆形的扫描站的信息。 目标的路线也可以由组合信息形成。 此外,根据来自更高指挥点命令的防空导弹旅的数据,可以从KP系统获得指令。 生产总监采用多通道引导站进行角度坐标自动跟踪,然后向系统指挥中心报告。 反过来,KP组织向该站的干扰机发布有关该范围的信息。 为此目的,数据用于目标范围,然后是指挥所,这是与生产飞机最接近的指挥所。 在导弹制导站,指挥所数据的推断确定了与陪同导演的距离。 将来,该系统的工作方式与空气动力学目的相同。 在启动9A82发出必要发射导弹9M82命令,球队已经与导弹制导站,这是在作业面空导弹广播干扰的迹象,并改变了解决发射前的指导问题。 相对于目标的当前位置进行了指导,而不是先发制人点。 在导弹上,这个命令改变了火箭计算装置操作的算法,确保导弹在目标上的归位,它们之间有很大的距离。 控制系统的其余部分与空气动力学目的相同。
在集中控制模式下,C-3002防空导弹系统由指挥所,目标指定和目标分配由指挥所(Polyana-D4自动控制系统)由防空导弹旅操作。 在该旅中,他们组织了ZRK(防空导弹营),配备了C-300。 该旅不得不从与雷达后指定的自动化控制系统的一个点的命令和控制(自动指挥所)(包括雷达:9S15M - 圆图,9S19M2 - 软件审查1L13 - 待机,以及所述波里-P1 - 点雷达信息处理),三个或四个导弹营。
它们的结构是:指挥控制中心; 9A457启动和充电安装。
C-300前线防空导弹旅的目的是取代克鲁克陆军前线防空导弹旅。

在特殊演习和战斗训练演习期间,C-300 ZRS系统的高机动性和作战能力得到了多次确认。 例如,在防御-92演习期间,C-300B提供了第一枚击败飞机的导弹,弹道导弹最多被两枚导弹摧毁。
C-3002防空导弹系统的诞生是国内重大科技成果,领先于国外设计。
主要是由于C-300B和C-300В1系统联合测试的国家委员会主席的意志品质,组织技能,技术和军事知识,Andersen Yu.A. 成功地测试了系统,客观地评估了系统的能力,并建议它们被SA(地面部队的防空部队)采用。
很难高估许多军事专家和国防工业团队对C-300的发展的贡献。 国家的工作得到了充分的注意。
列宁奖的获奖者是Shebeko V.N.,Prokofiev D.I.,Smirnov V.A.,Chekin G.I.,Epifanov V.N. Efremov V.P.,Vinokurova V.A.,Sprintis E.K.,Zotova Y.Ya.,Gelda L.P.,Kuznetsova Yu.A.,Zgodu V.I.,Sorenkova E.I. 。,HE莲,IF戈卢别夫,AG戈勒,科瓦尔SM,工作NF Kozhukhova YA,IA Bisyarina,Izvekova AI, Barsukov S.A.,Nechaeva V.P.,Volkova I.D.,Duel M.B.,Andersen Yu.A. 和其他人
在无线电工业部的马里机械制造厂科学和生产协会掌握了C-3002计划审查的指挥所,多通道制导站和雷达站的制作。 导弹,发射装置和发射装置制造了无线电工业部的生产协会“以MI Kalinin命名的斯维尔德洛夫斯克机械制造厂”。 由无线电工业部无线电测量装置的Murom工厂进行了循环审查的雷达站的生产。 用于C-300战斗设备的履带式自行火炮由Kirovsky Zavod生产协会提供。 这些企业的集体在掌握这一复杂系统的生产方面投入了大量的创造性工作,这使得C-300®现成技术变得容易,生产样品在世界市场上具有竞争力。
202-I将防空导弹旅分开 - 这是西部军区地面部队军事防空力量的强大作战单位。 与该旅一起使用的是导弹C-300В。 防空导弹系统(ZRS)C-300V已经确立了自己的有效性和可靠性。 该系统能够快速部署,能够以高达100 km的距离击中多个高速空中目标,高度可达30 km,可靠地覆盖敌人空袭中的任何物体。
今年2月,2设法访问该旅并在寒风中度过了几个小时,观察了已经开始下一阶段战斗训练的火箭战士的行动。 (Http://photo.oper.ru)
信息