无人机预警雷达的概念

资料来源:航空兵
1.预警机发展的主要阶段
AWACS设计中出现的主要问题是(为了获得较大的目标检测范围),雷达必须具有大面积的天线,并且通常无处可将其放置在板上。 第一个成功的预警机是60多年前开发的,到目前为止还没有出现。 它是根据甲板运输车创建的,名称为E2 Hawkeye。
蘑菇
当时所有AWACS的主要思想是将旋转天线放置在机身上方的``蘑菇''中。
雷达通过测量目标的范围和两个角度(水平和垂直(方位角和仰角))来确定目标的坐标。 获得高精度的距离测量非常容易-足以准确确定从目标反射的回波信号的返回时间。 角度测量误差的贡献通常比范围误差大得多。 角度误差的大小由雷达波束的宽度决定,通常约为0,1波束宽度。 对于扁平天线,其宽度可由公式α=λ/ D(1)确定,其中:
α是波束宽度,以弧度表示;
λ是雷达波长;
D是沿相应坐标(水平或垂直)的天线长度。
在选定的波长下,为了使波束尽可能窄,必须根据飞机的能力将天线的尺寸最大化。 但是,天线尺寸的增加导致“蘑菇”中间部分的增加,并使空气动力学恶化。
薄煎饼的缺点
Hokai开发人员决定放弃使用平板天线,而改用“波道”型电视天线。 这种天线由纵向杆组成,在该纵向杆上安装有多个振动管。 结果,天线仅位于水平面内。 而且“蘑菇”帽变成了水平“煎饼”,几乎没有破坏空气动力学。 无线电波的辐射方向保持水平,并与吊杆方向一致。 “薄煎饼”的直径为5 m。
当然,这种天线也具有严重的缺点。 对于选定的70厘米波长,方位角波束宽度仍然可以接受-7°。 仰角为21°,因此无法测量目标的高度。 如果在瞄准战斗轰炸机(IS)时,由于车载雷达(雷达)本身能够测量目标高度的能力而导致对高度的了解不明显,那么这些数据不足以发射导弹。 通过减小波长不可能使光束变窄,因为“波道”在短波下的效果更差。
70厘米射程的优势在于,它显着提高了隐形飞机的可见度。 常规IS的探测范围估计为250-300 km。 北海的规模小和价格便宜导致了其生产没有停止的事实。
预警机
由于增加了检测距离并提高了跟踪精度的要求导致了基于客机Boeing-707的新型AWACS AWACS的开发。 在“蘑菇”中放置一个尺寸为7,5x1,5 m的扁平垂直天线,将波长减小到10 cm,结果,波束宽度减小到1°* 5°。 雷达精度和抗干扰性已大大提高。 IS的检测范围已增加到350 km。
苏联预警机的类似物
在苏联,第一架预警机是在Tu-126的基础上研发的。 但是它的雷达的特点是中等的。 然后他们开始开发AWACS的类似物。 找不到重型客运车。 他们决定使用不太适合预警机的Il-76运输机。
机身宽度过大,质量过大(190吨)和不经济的发动机导致过多的燃油消耗。 是AWACS的两倍。 当天线转向尾部时,稳定器抬高到龙骨顶部并位于“蘑菇”后面,使雷达波束反射到地面。 而且,来自地面的背反射所引起的干扰极大地干扰了尾巴区域中目标的检测。
没有雷达升级可以消除该航母的缺点。 即使用更经济的发动机替换发动机也不会使燃油消耗达到AWACS的水平。 检测范围和准确性几乎与AWACS一样好。 但是在未来几年中,AWACS也将停止使用。 媒体的差异也会影响运营商。 Il-76不是客机,舒适度很低。 班次结束时机组人员的疲劳度明显高于波音707。
时代AFAR
具有有源相控阵天线(AFAR)的雷达的出现极大地改善了雷达性能。 AWACS出现时没有“蘑菇”。 例如,基于波音767的FALKON。 但是在这里,使用最终的介质也无法获得良好的结果。 机身中间的机翼导致了侧面AFAR必须被切成两半的事实。 安装在机翼前面的AFAR向前和向侧面辐射。 而AFAR在机翼后面-向后倾斜。 但是不可能获得一个大面积的AFAR。
我们的A-100剩下一个“蘑菇”。 AFAR安装在“蘑菇”内部,而不是旋转天线。 有必要更换介质,但这没有发生。 (据报道)探测距离已增加到600公里。 但是载体的缺陷并没有消失。 A-50公园处于令人沮丧的状态。 在其余飞机中,有9架飞行(甚至很少)。 显然,没有足够的钱进行常规航班。 缺乏常规的预警飞机飞行,导致敌人确信自己的低空“战斧”型导弹发射器很容易在不被注意的情况下通过我们的边界。
与美国不同,俄罗斯联邦没有气球雷达监视海上边界。 而且,到处也找不到在海岸上可以安装监视雷达的山丘。 在陆地上,情况甚至更糟。 使用地形褶皱的战斧可以在仅几公里的距离内通过雷达站。 人们相信巡航导弹(CR)可以在50 m的高度上空飞行,但是,该地区的现代数字地图已经变得如此详尽,以至于它们甚至可以显示单个的高空物体。 然后,可以在明显较低的高度绘制海拔飞行曲线。 KR在海面上方飞行约5 m,因此,国防部关于在RF中创建连续雷达场的声明不适用于KR。
一个创新的想法
结论表明了自己-有必要开发一种专门的载体,让您放置大面积的AFAR,这是作者提出的概念。
他认为,这种预警机的质量将大大小于预警机的质量。 并且检测范围ꟷ更大。 每小时的运行成本会适中。 这样就可以进行常规飞行(但当然不能按计划进行)。 重要的是,敌人不知道飞行将在何时,何地以及沿着什么轨迹进行。
2.证实有前途的无人机预警机的概念
以前在世界概念“ AWACS飞机-空中指挥所”中占主导地位的是无可救药的。 AWACS能够将高速线上的所有信息转储到400-500 km距离的地面指挥所。 如有必要,您可以使用无人机中继器,这将使通信距离增加到1300公里。 前预警机上有大量人员在场,因此有必要分配值班保安来保护他们。 因此,一个小时的操作成本变得高昂。
此外,仅考虑无人机AWACS。 我们还将放弃在所有方向上确保相同检测范围的要求。 在大多数情况下,预警机在安全区巡逻并监视敌方区域或本国领土内给定区域中发生的情况。 因此,我们将要求AWACS必须至少具有一个120°宽度的扇区,并提供更大的检测范围。 在其余领域,仅提供自卫。
飞机上唯一可以放置大型APAR的地方是机身侧面。 但是在机身中间通常有一个机翼。 即使在使用该方案的上平面(如IL-76上)时,机翼也不允许查看上半球。 解决该问题的方法是将AWACS航迹提高到一个高度,以至于几乎所有目标都将低于该目标。 没有什么可以阻止它们的检测。
如果使用V形机翼,则高空目标的检测将更加容易。 在不损失机翼质量的情况下,爬升角度可以高达4°。 这样,雷达波束尚未从机翼反射的最大目标检测角度将为2ꟷ3°。 假设预警飞机位于16公里的高度。 然后,如果目标以最高20公里IS的高度飞行,则它将进入AWACS检测区域,直到到达不到80公里的距离。 如果有必要在更近的距离上跟随该目标,则AWACS可以沿滚动方向再倾斜5°,并继续跟踪到30 km的范围。
为了减少AFAR的质量,必须使用辐射性皮肤技术进行,将发射缝切入皮肤并用玻璃纤维密封。 AFAR的收发器模块(TPM)附着在皮肤上,TPM产生的多余热量直接散到皮肤上。 结果,APAR的质量显着降低。
3.无人机的设计和任务
应当记得,作者不是飞机制造专家。 如图所示。 如图1所示,布局(以及尺寸)反映了雷达天线放置的要求。 这不是真正的无人机的蓝图。
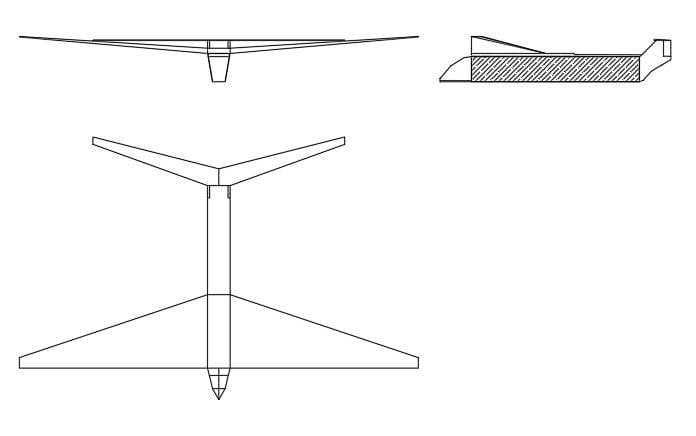
图1。
假设无人机的起飞重量为40吨,翼展为35ꟷ40m,飞行高度为16ꟷ18km。 时速约600 km / h。 发动机必须经济。 以全球鹰的设计为模型,应采用客机的发动机。 例如,PD-14。 并对其进行修改以进行高空飞行。 燃油质量22吨,飞行时间不少于20小时,起飞/飞行时间1000 m。
高机翼位置将不允许使用常规的三支柱起落架。 我们必须使用U-2这样的自行车底盘。 当然,像在U-2上一样,在运行结束时用机翼撞击跑道不会在这里起作用。 并且难以使用延伸到侧面的支撑轮。 由于侧面被AFAR占据。
提议像在飞机上那样使机翼的最后7 m折叠。 但它们不应上升,而应以40°45°的角度下降。 以免碰到跑道。 支撑轮安装在翼尖上。 如果突然阵风,它会进入跑道。 长的机翼长度将在车轮上提供较低的负载。 运行结束时,无人机将停在其中一架上。
接下来,我们将考虑放置侧面AFAR的可能性。 当天线具有尽可能大的面积并且天线形状接近圆形或正方形时,可以获得最佳的雷达性能。 不幸的是,在一架真正的无人机上,形状总是会与最佳形状相差很大-高度远小于长度。
机身形状和尺寸的选择只能由经验丰富的飞机工程师来执行。 好吧,现在,让我们考虑两个具有相同面积的APAR形状的理论上可能的版本。 第一个选项(16x2,4 m)将被认为是最现实的。 第二个(10,5x3,7 m)-需要进一步研究。
考虑第一种选择,其中机身长度为22 m。设计特征是在机翼下方有一个细长的进气口。 这使得可以增加机身侧面的高度。 AFAR由点划线显示。
AFAR的工作波长范围为20-22 cm,这将允许使用一个AFAR解决雷达,状态识别和与指挥所之间的抗干扰通信的问题。 该范围的另一个优点(与A-10的50 cm范围相比)是,隐身目标的图像增强器从15ꟷ20 cm的波长开始,随波长的增加而增加。
机头(在整流罩下方)有一个椭圆形AFAR,尺寸为1,65×2 m。由于机头天线无法提供所需的方位角测量精度,因此在机翼前缘还额外安装了两个纯接收AFAR。 机身到机翼天线的距离为1,2 m,机翼AFAR是由96个接收模块组成的线,总长度为10,6 m。
鼻AFAR的角度工作范围±30°*±45°。 使用机翼安装的APAR将稍微增加检测范围(增加15%)。 但是方位角的测量误差将大幅度降低(降低5-6倍)。
尾部仅包含通信线天线。 因此,在后半球的视野中,存在一个宽度为±30°的“死区”。
为了减轻飞机的重量,通讯大楼使用与主通道相同的AFAR。 在他们的帮助下,可以将信息高速传输(高达300 Mbit / s),并且可以抗噪声地传输到地面或船舶通信点。 为了在通信点接收信息,安装了20ꟷ22cm范围的收发器,这些收发器的天线没有特殊要求。 敌人无法产生这种力量的干扰,这可能会抑制AWACS雷达的信号。 而且可以低速将信息从通信点传输到AWACS。
3.1。 雷达设计
侧面AFAR应位于机翼下缘下方25厘米处。 然后,她可以在整个可用的±60°方位角范围内扫描下半球。 在上半球,仰角大于2-3°时,机翼开始干涉。 因此,AFAR分为两个部分。 前部位于机翼下方,无法向上扫描。 后半部可以在±20°的方位角范围内向上扫描,此时其光束不会接触机翼或稳定器。 这一半的仰角扫描范围为+ 30°至-50°。
横向AFAR包含2880 PPM(144 * 20)。 脉冲功率PPM 40W。 该AFAR的功耗为800,8 kW。 光束宽度为5,2°* 10°,甚至比AWACS还要窄。 因此,目标跟踪的准确性将高于AWACS。 期望在目标检测和跟踪范围内获得更大的收益。 首先,AWACS天线面积为38平方米。 m。AFAR面积为360平方米。 m。其次,AWACS天线均匀扫描整个120°。 侧向AFAR的角度仅为XNUMX°,甚至是不均匀的:在怀疑存在目标的那些方向上,会发送更多的能量,并且消除不确定性(也就是说,这些方向上的检测范围会增加)。
鼻天线包含184 PPM的80 W脉冲功率并进行水冷。 光束宽度为7,5 * 6°,扫描角度为方位角±60°,仰角为±45°。
雷达的最大功耗为180 kW。 雷达的总重量为2–2,5吨,串行模型雷达的主要成本显然为12–15万美元。
4. AWACS的任务和功能
当在海上剧院使用时,无人机必须在距本机飞机场最多2ꟷ2,5千公里的距离内为KUG提供信息支持。 即使在这样的距离下,它也可以至少工作12个小时。在值班区域,无人机必须受到KUG防空系统的保护,也就是说,必须将其移开不超过150-200公里的距离。 如果有袭击的危险,则无人机必须在KUG的保护下以不超过50公里的距离返回。 在这种情况下,无人机雷达和库格雷达必须在它们之间分配攻击空中目标的探测区域。 在下半球,它可以检测到无人机和更高的目标-防空系统雷达。
让我们考虑一下,在飞行高度为16 km的情况下,敌舰的探测半径将为520 km。 也就是说,控制中心的射程可确保在整个飞行范围内发射玛瑙反舰导弹系统。
当护送没有甲板预警机的航空母舰和UDC时,UAV可以参与机翼的行动。 除了传统的空中和海上目标检测之外,无人机还能够利用侧向AFAR的极高能量潜力来检测敌方无线电对比目标以及大口径加农炮弹的轨迹。 此外,无人机可以检测正在移动的装甲车。
5.雷达的战术和技术特点
AFAR横向特征
侧面天线轴方向的检测范围:
-F-16型战斗机,配备2平方英寸的图像增强器。 m海拔10 km-900 km;
-带有0,1平方英寸图像增强器的RCC。 m-360公里;
-具有有效反射面(EOC)0,03平方英寸的制导导弹AMRAAM。 m-250公里;
-76毫米口径的炮弹,配备0,001平方英寸的图像增强器。 m-EOP 90公里;
-图像增强器为50平方米的导弹艇。 m-400公里;
-带有图像增强器的驱逐舰1000平方英尺。 m-500公里;
-以3 m / s的速度移动的坦克和5平方英寸的图像增强器。 m-250公里。
在等于±60°的方位角扫描区域的边界处,检测范围减小了20%。
对于等于相应目标的检测范围的80%的范围,给出了角度的单个测量的误差:
-方位角-0,1°,
-仰角-0,7°。
在目标跟踪期间,角度误差会减少2-3倍(取决于目标的操作)。 当目标范围减小到检测范围的50%时,单次测量的误差减半。
AFAR测量16x2,4 m的缺点恰恰是仰角测量精度低。 例如,在F-16 IS的高度测量误差(其后为600 km)将为2 km。
如果有可能实现第二版的侧面AFAR尺寸为10,5x3,7 m,则IS探测范围将增加到1000 km,而600 km处的高度测量误差将减小到1,3 km。 机身长度将减少到17 m。
鼻AFAR的特征
鼻天线轴方向的检测范围:
-带有图像增强器的战斗机2平方米。 m-370公里;
-带有0,1平方英寸图像增强器的RCC。 m-160公里;
-AMRAAM型制导导弹,图像增强器为0,03平方英寸。 m-110公里;
-带有图像增强管的导弹船50平方米-300公里;
-带有图像增强器的驱逐舰1000平方英尺。 m-430公里;
-以3 m / s的速度移动的坦克和5平方英寸的图像增强器。 m-250公里。
单角度测量误差:
-方位角:0,1°;
-仰角:0,8°。
在目标跟踪过程中,测量误差减少了2-3倍。
侧面AFAR的成本价格取决于批量大小。 我们将重点关注5万美元的价格。 届时,雷达站的总成本将为14万美元。 这比世界市场上的类似物便宜得多。
6.在陆上剧院使用预警机的策略
陆上联合武器预警机的任务是向邻国领土的深处阐明空中状况,并记录边界深达300公里的大型部队的动向。 在特殊情况下,也可能造成纯粹的局部问题。 例如,护送危险的恐怖分子的汽车。 为了使手表在整个受威胁期间连续不断,重要的是能够将一小时的手表成本降至最低。
无人机必须沿边界巡逻,以确保其安全。 如果敌人在边境地区拥有远程防空系统或IS机场,则该距离至少应为150公里。
为了防止战时失败的可能性,有必要用自己的防空手段来确保对无人机的保护。 最便宜的方法是使用一对能够覆盖150-200公里长的游荡区的防空导弹系统。 如果没有自己的防空系统,到边界的距离可以增加到200公里。 这样,在确保攻击导弹(和敌方战斗机)的侦查范围很长的同时,将有可能在最近的机场升空IS值班人员的情况下,在其本国领土内进行一次撤退机动。
在和平时期,您无需使用此类保护。 无人机可以直接沿边界航行。 同时,它可以自行检测移动中的车辆,但不识别其类型。 在这方面,通过结合在敌方领土上(或从卫星)进行的光学侦察,结合对指定目标的识别,并使用无人机跟踪检测到的目标,可以实现最佳效率。
例如,如果侦察员检测到恐怖车辆,预警机操作员将能够将其置于自动跟踪状态,甚至在其他车辆附近的道路上跟踪该车辆的移动,并呼叫攻击无人机将其摧毁。
7。 发现
Il-76飞机是新型A-100 AWACS联合体的航母,从根本上没有改变。 而且不可能从根本上减少一个小时的运行成本。 因此,您不能指望它的常规使用。 尽管雷达的特性有所改善。
拟议的预警机无人机提供的探测范围是A-1,5的100倍。 重不到四倍。 而且它消耗的燃料少五倍。
较长的探测范围使您可以在安全距离(200公里)内控制敌人的领空,而无需使用安全信息安全措施。
增加的飞行高度使得可以在最远500 km的距离检测地面和地面目标。
长时间的飞行使使用无人机护送KUG,支持两栖作战和AUG行动成为可能,距飞机场的最大距离为2500公里。
集成在一个AFAR中的雷达,状态识别和通信功能使进一步减轻设备的重量和成本成为可能。
设备的适度成本将确保无人机的高竞争力。
不幸的是,国防部的此类提议尚未引起人们的兴趣,仍然被认为是幻想。
在下一篇文章中,我们将考虑无人机的预警飞机的舰载版本。
信息