巡航导弹导航方法

鉴于巡航导弹的战斗使用经验,覆盖六十五年,它们可被视为一种成熟且经过充分验证的技术。 在它们存在期间,用于制造巡航导弹的技术得到了大量发展,包括机身,发动机,克服防空和导航系统的手段。
由于采用了创造技术,火箭的机身变得越来越紧凑。 现在可以将它们放置在所述内室和所述外部吊索飞机,船载发射管型或潜艇的鱼雷管。 发动机通过涡轮喷气和液体燃料火箭发动机或发动机冲压(冲压)从简单的脉动喷射器更改为当前组合涡轮喷气发动机亚音速战术巡航导弹涡扇发动机的亚音速战略巡航导弹和冲压式喷气发动机或混合涡轮喷气发动机/火箭设计的超音速战术巡航导弹。
办法克服在1960非法入境的任何防空当防空系统已成为非常有效的。 这些包括低海拔飞行,地形跟踪飞行或导弹在极低的高度海面,目的以上从雷达隐藏和日益形状加强隐身雷达吸收材料和设计,以减少雷达特征。 一些苏联巡航导弹还配备了干扰防御目的,旨在阻挠拦截zenitnoraketnyh复合物。
最后,在此期间,巡航导弹导航系统得到了大量发展和多样化。
巡航导弹导航问题
所有巡航导弹的主要思想是 武器 它可以在超越敌方的防空系统,以不暴露发射平台应对攻击达到目标启动。 这就产生了一个严重的设计问题,其中第一个成为一种挑战,使巡航导弹安全地转移到数千公里的接近距离的目标 - 而当她将在靠近目标,提供弹头精确制导的目标生产计划军事效应。

第一种战斗巡航导弹FZG-76 / V-1
第一个战斗巡航导弹是德国FZG-76 / V-1,其中使用的8000超过XNUMX,主要用于英国目标。 从现代标准来看,它的导航系统非常原始:基于陀螺仪的自动驾驶仪保持了航向,风速计距离目标。 火箭在发射前设定在预定的路线上,并且在目标上设定了与目标的估计距离,并且一旦里程表显示火箭高于目标,自动驾驶仪就将其陡峭下潜。 火箭的准确度大约为一英里,足以炸毁伦敦等大型城市目标。 轰炸的主要目的是恐吓平民,使英国军队远离攻击行动,并派他们去执行防空任务。

第一枚美国巡航导弹JB-2是德国V-1的副本
在战后初期,美国和苏联重新V-1,并开始发展自己的巡航导弹的计划。 第一代运营和战术核武器的舞台引起了一系列的巡航导弹轩辕美国海军系列锤/斗牛士美空军和苏联的一系列彗星CS-1 - 20和Comet和导航技术的进一步发展创造。 所有这些导弹最初使用基于精确的陀螺仪自动驾驶仪,而且还调整收音机频道火箭的轨迹,使核弹头可以作为密切作为可能的可能性。 滑几百米可能足以降低产生的核弹头是低于致死阈加固目标的超压。 在1950-IES服务收到的第一个战后的常规战术巡航导弹,特别是反舰武器。 而制导路径继续陀螺仪的基础上,有时通过无线电校正,对最终的轨迹定位精度由GOS与短程雷达的动作,半有源的最早版本所提供的,但很快就被主动雷达移位。 这一代火箭队通常在中高空飞行,在攻击目标时潜水。

洲际巡航导弹Northrop SM-62 Snark
在导航技术与巡航导弹的下一个重要步骤,然后采用洲际巡航导弹,陆基诺斯罗普SM-62斯纳克,设计用于自主飞行在极地地区进行攻击核弹头的主要目标在苏联。 向一个新的挑战的设计师洲际距离 - 创建能够在击球的距离的十倍不止它可以做早期版本的巡航导弹目标的导弹。 上斯纳克是使用陀螺稳定用于存储测量平台和用于测量在空间中的移动准确导弹加速度计,以及模拟计算机和确定在空间中的导弹的位置设置适当的惯性导航系统。 但是,很快,揭示了惯性系统漂移的问题是对作战使用的导弹和惯性定位系统的失误太大是累积 - 因此与每个飞行小时的累积定位误差。
这个问题的解决方案是另一种设备,用于精确测量火箭在其飞行路径上的地理位置,并能够纠正或“纠缠”惯性系统中产生的误差。 这是一个基本理念,今天仍然是现代制导武器设计的核心。 因此,惯性系统的累积误差周期性地减小到位置测量装置的误差。

马丁斗牛士巡航导弹
为了解决这个问题,使用了一种宇航系统或星形方向,一种自动光学装置,它对恒星的已知位置进行角度测量,并用它们来计算火箭在太空中的位置。 天文航空系统被证明是非常准确的,但制造起来也很昂贵并且难以维护。 还要求配备该系统的火箭在高空飞行,以避免云雾对星星视线的影响。
众所周知,天文系统的成功通常已经引发了GPS和GLONASS等卫星导航系统的发展。 卫星导航基于类似的宇宙导航概念,但是使用极轨道中的人造地球卫星代替恒星,并且使用人工微波信号代替自然光,并且使用伪距测量而不是角度测量。 因此,该系统显着降低了成本,并允许在所有天气条件下确定所有高度的位置。 尽管卫星导航技术是在1960-s开始时发明的,但它们仅在1980-s中开始运行。
在1960中,惯性系统的精度得到了显着改善,并且这些设备的成本也有所增加。 结果,这导致了准确性和成本要求的冲突。 因此,通过将地形的雷达显示与参考测绘程序进行比较,基于火箭定位系统的巡航导弹导航领域出现了一项新技术。 该技术使用1970中的美国巡航导弹和1980中的苏联导弹进入服役。 TERCOM技术(具有巡航导弹制导单元的地形起伏的数字相关系统)与航天系统一样,用于重置总惯性系统误差。

巡航导弹彗星
TERCOM技术设计相对简单,但细节复杂。 巡航导弹使用雷达高度计连续测量其飞行轨迹下的地形高度,并将这些测量结果与气压高度计读数进行比较。 TERCOM导航系统还存储将飞行的地形的数字高程地图。 然后,使用计算机程序,将火箭飞过的地形的轮廓与存储的数字高程图进行比较,以确定它们的最佳拟合。 一旦配置文件与数据库匹配,就可以准确地确定火箭在数字地图上的位置,该位置用于校正惯性系统的累积误差。
TERCOM拥有的天文导航系统的一个巨大的优势:它是允许携带巡航导弹,以克服敌人的防空需要极低的高度飞行,这是相对便宜的生产和非常准确(最多十米)。 这是绰绰有余220克拉弹头和足够保护多种类型的目标使用常规500磅弹头。 但TERCOM并非没有缺陷。 这是飞越独特的丘陵地形的火箭,很容易与数字地图的轮廓高度相比,具有优异的精度。 然而TERCOM证明过水表面是无效的,上面的季节性可变地形,例如沙丘和与各种季节性雷达反射率如西伯利亚苔原和北方针叶林地形其中雪可以改变地形的高度或隐藏其特征。 火箭的有限记忆容量常常使得存储足够的地图数据变得困难。


波音AGM-86 CALCM巡航导弹
被充分具备携带核弹头的战斧KR RGM-109A海军和AGM-86 ALCM空军,TERCOM显然不足以消除个别建筑物或构筑物的常规弹头。 在这方面,配备战斧TERCOM RGM-109C / d额外的系统,美国海军巡航导弹基于其数字方式的所谓的相关性显示技术的参考对象。 该技术已在1980非法入境被用于对弹道导弹的潘兴II,苏联KAB-500 / 1500Kr和美国的高精密炸弹绫/ JDAM,以及最近中国的反控制的导弹系统旨在对抗航母。
显示当对象相关用于相机固定到导弹的位置,然后从照相机中的信息与通过卫星或空中侦察导弹接收并存储在存储器中的数字图像进行比较。 测量旋转和位移,所需的两个图像的精确匹配的角度,该装置能够很准确地确定位置导弹误差,并使用它的错误校正和TERCOM惯性导航系统。 块数字相关巡航导弹制导系统DSMAC在几个街区KR战斧真的准确使用,但有副作用类似操作TERCOM,这对火箭飞越容易辨认的地形特别是在目标附近进行编程。 在1991个一年,在沙漠风暴行动,这导致了在巴格达的一些路口已被用作这样的绑定,而这又允许国防军萨达姆设在那里,和防空电池击落了几战斧。 除了块TERCOM数字相关巡航导弹制导系统是在对比度区域的季节性变化很敏感。 配备DSMAC的战斧还配备了手电筒,以便在夜间照亮地形。
在1980中,第一批GPS接收器被集成到美国巡航导弹中。 GPS技术很有吸引力,因为无论地形和天气条件如何,它都能使火箭不断纠正其惯性误差,而且它在水面和地面上的作用也相同。
这些优点通过GPS低噪声免疫力的问题依赖于卫星的数量在精度变更被无效,由于GPS信号本身非常弱,容易受到“重像”的效果(当GPS信号从地形或建筑物反射的),和接收,并且因为它们分布在天空中。 今天所有的美国巡航导弹配备有GPS接收器和惯性制导系统包,并在1980-1990的和早期IES技术的机械惯性系统的最后一个更便宜和更精确的惯性导航系统来代替环形激光陀螺仪。
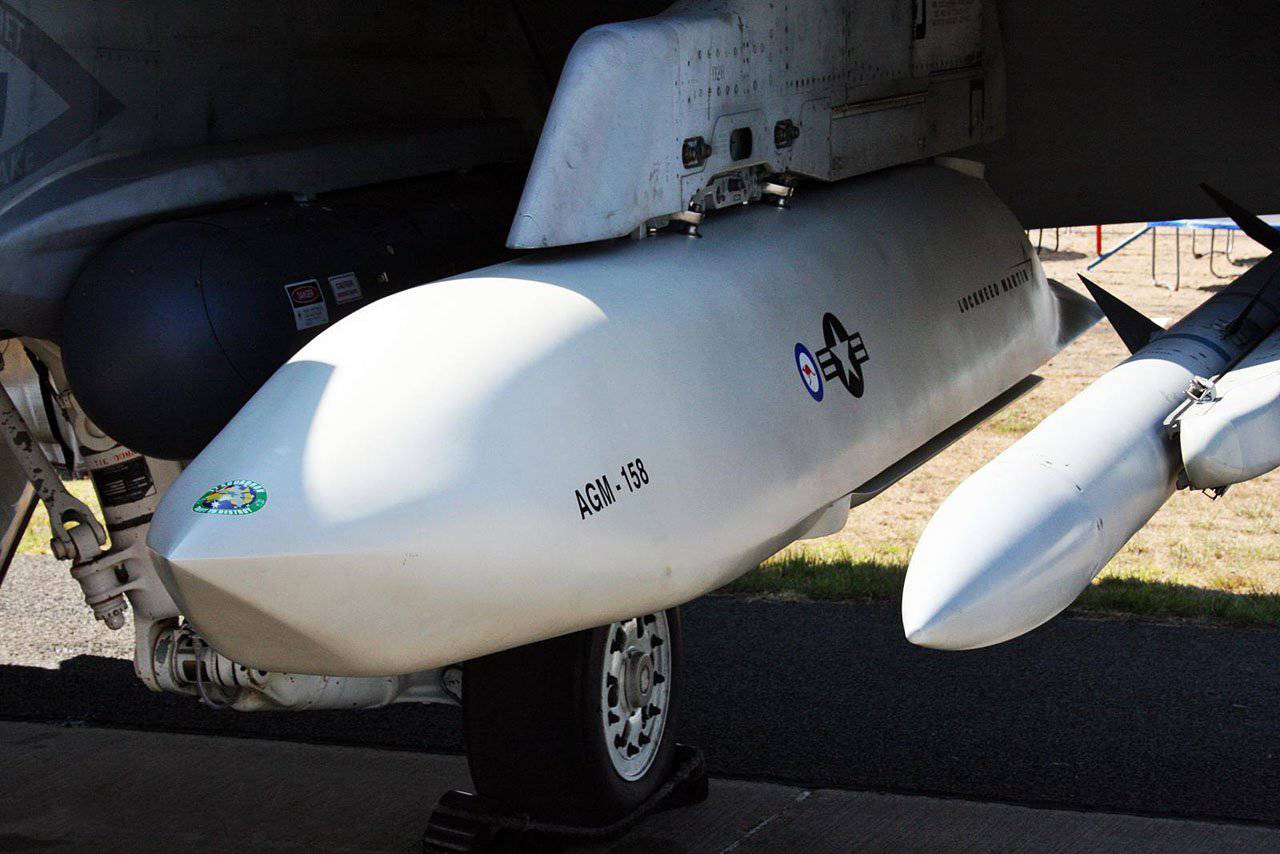
巡航导弹AGM-158 JASSM
与主GPS的精度有关的问题通过将宽频带方法GPS(广域差分GPS),在该修正信号是有效的关于无线电信道的GPS接收器的给定地理位置的广播(在美国导弹使用WAGE - 宽区GPS增强的情况下)逐步得到解决。 的该系统的信号的主要来源是无线电导航信标和卫星对地静止轨道。 在美国1990独立实体开发的最精确的一种技术都能够正确的GPS误差降到几英寸的三个维度和足够准确装甲车打开舱门让火箭。
抗噪声和“重复图像”的问题最难解决。 它们都导致了引进所谓的“智能”天线的技术通常是基于软件的“数字波束形成”。 这项技术背后的想法很简单,但通常很难详细。 通常GPS天线从各地导弹上方的上半球接收信号,因此包括GPS卫星,以及敌人的干扰。 使用该软件的受控辐射模式(控制的接收模式天线,CRPA)的所谓的天线合成针对GPS卫星的预期位置窄波束,其结果是该天线是在所有其他方向“盲”。 这种类型的天线的最先进的设计生产中对干扰源,以进一步抑制其影响天线模式的所谓的“零”。

巡航导弹托马加夫
在AGM-158 JASSM巡航导弹生产之初广泛宣传的大多数问题都是GPS接收机软件问题的结果,导致导弹失去GPS卫星并从轨道上掉下来。
先进的GPS接收器可为位于地面的GPS信号源提供高精度和强大的抗噪声能力。 它们对于部署在卫星,无人驾驶飞行器或浮空器上的复杂GPS干扰源的效果较差。

最新一代的美国巡航导弹的使用GPS惯性制导系统,补充其安装在导弹数字热成像相机的鼻子,目的在于提供像DSMAC机会,对相应的软件,并自动识别图像中的可能性静止目标和打击移动目标,如防空火箭系统或火箭发射器。 数据链路,作为一项规则,来自技术JTIDS /链路16,引入允许重新定向武器时移动目标的时间改变了它的位置,花了火箭的征途上。 该功能的使用主要取决于具有智能的用户以及检测目标的这种运动的能力。
巡航导弹导航发展的长期趋势将导致其更大的智能,更大的自主性,更大的传感器多样性,更高的可靠性和更低的成本。
信息