有前景的装甲车的工作场所和战斗算法的人体工程学
在之前的文章中我们看过 提高装甲车辆态势感知的方法 и 需要提高目标武器和侦察设备的速度。 同样重要的是提供机组人员与战斗车辆的武器,传感器和其他技术系统的有效直观交互。

目前,机组人员的工作是高度专业化的 - 一个单独的驾驶员座位,指挥官和炮手的个人工作。 最初,这是由于装甲车辆的布局,包括旋转塔和光学观察设备。 所有机组成员只能访问自己的控制和监视设备,无法执行其他机组成员的功能。
以前在 航空例如,我们可以举出MiG-31战斗机/拦截机或Mi-28N战斗直升机的飞行员和导航员/操作员的工作场所。 通过工作空间的这种安排,机组人员之一的死亡或受伤使得战斗任务无法实现,即使返回基地本身的过程也变得困难。

目前,开发商正在努力统一船员工作。 这主要是由于多功能显示器的出现,可以从船上的任何智能设备上显示任何必要的信息。
统一飞行员和导航员操作员工作是波音/西科斯基RAH-66科曼奇侦察和攻击直升机的一部分。 此外,RAH-66直升机的飞行员应该能够控制战斗车辆的大多数功能,而无需将手从控制器上移开。 在RAH-66直升机中,计划安装Kaiser-Electronics头盔式集成瞄准系统,能够显示来自前半球观察系统的红外(IR)和地形电视图像或头盔显示器上的地形的三维数字地图,实现“机舱外的眼睛”原理。 头盔式显示器的存在允许您驾驶直升机,武器操作员可以搜索目标而无需查看仪表板。

RAH-66直升机计划已经关闭,但毫无疑问,其实施过程中取得的成就被用于其他计划中,用于制造先进战斗车辆。 在俄罗斯,根据Mi-28UB战斗直升机的创造经验,在Mi-28HM战斗直升机上实施了飞行员和导航员操作员的统一工作场所。 同样对于Mi-28HM,飞行员的头盔正在开发,图像显示在面罩和我们的头盔目标指定系统上,我们在之前讨论过 文章.
具有显示信息能力的头盔,无人驾驶塔和遥控武器模块(DUMV)的外观将允许统一地面战车的工作场所。 所有机组成员(包括驾驶员)的工作场所很可能是透明的。 现代控制系统不需要控制器和执行器之间的机械连接,因此紧凑的方向盘甚至横向低速控制旋钮 - 高精度操纵杆 - 可用于驱动装甲车。

根据未经证实的报道,自2013年开发控制系统以来,就考虑过使用操纵杆替代方向盘或控制杆的可能性。 一个坦克 T-90MS。 此外,据称,Kurganets步兵战车控制面板(BMP)是用Sony Playstation游戏机游戏手柄的图像制成的,但尚未透露此遥控器是设计来控制IFV的运动,还是仅用于控制武器。
因此,为了控制预期战斗车辆的运动,可以考虑使用侧面低速控制旋钮的选项,并且如果发现该选项不可接受,则方向盘缩回到非激活状态。 默认情况下,战斗车辆的运动控制必须与驾驶员一起激活,但如有必要,任何机组成员都应该能够替换他。 战斗车辆控制元件设计的主要规则应该是“手掌始终处于控制之下”的原则。
机组成员的统一工作场所应位于与Armata项目中实施的战斗车辆的其他舱室隔离的装甲舱中。
固定在减震器上的具有可变倾斜角度的椅子应当在崎岖地形上行驶时减少振动和摇晃的影响。 将来,主动减震器可用于消除振动和振动。 船员座椅可以提供与多区域气候控制相结合的通风。
似乎这样的要求是多余的,因为坦克不是豪华轿车,而是战车。 但现实情况是,未受过训练的新兵配备的军队时间已经无可挽回地消失了。 战斗车辆的复杂性和成本日益增加,需要各自的专业人员参与,他们需要提供舒适的工作场所。 考虑到装甲车的成本,每单位约五千万美元,安装增加船员舒适度的设备不会对总量产生很大影响。 反过来,正常的工作条件将有助于提高船员行动的效率,而不需要被国内的不适分散注意力。
自动化最困难的问题之一是确保人与技术的有效互动。 正是在这个领域,在“定位”和“决定”阶段,NORD周期(观察,定位,决定,行动)可能会出现严重延迟。 要了解情况(方向)并做出有效决策(决策),应以最易于访问和直观的形式显示船员信息。 随着硬件的计算能力的增加和使用基于神经网络的信息分析技术的软件(软件)的出现,可以将先前由人类执行的处理智能数据的一些任务分配给软件和硬件系统。
例如,当攻击ATGM时,装甲车辆的车载计算机可以独立分析来自热成像仪和在紫外(UV)范围内操作的摄像机(火箭发动机轨迹),来自雷达的数据以及可能来自声学传感器的图像,检测并捕获ATGM发射,选择必要的弹药并通知机组人员,之后,可以通过一个或两个团队(武器撤销,射击)自动进行ATGM计算的销毁。

未来装甲车辆的车载电子设备应能够通过其热,UV,光学和雷达签名独立识别潜在目标,计算运动轨迹,根据威胁程度对目标进行排名,并以方便的形式在屏幕或头盔上显示信息。 不充分或相反,冗余信息可能导致决策延迟或在“定向”和“决定”阶段采用错误决策。

检测紫外线范围内伪装的战斗机
装甲车辆工作人员的重要帮助可以是混合来自不同传感器的信息,并显示在同一屏幕/层上。 换句话说,来自放置在装甲车辆上的每个监视工具的信息应该用于形成尽可能舒适的感知的单个图像。 例如,在白天,来自高分辨率彩色摄像机的视频被用作构建图像的基础。 来自热成像仪的图像用作辅助以突出暖对比元素。 此外,根据来自雷达或UV相机的数据显示图像的附加元素。 在晚上,来自夜视设备的视频图像成为构建图像的基础,因此通过来自其他传感器的信息来补充。
这种技术目前甚至在具有多个相机的智能手机中使用,例如,当使用具有较高光敏性的黑白矩阵来改善彩色相机获得的图像的质量时。 应用结合图像和工业用途的技术。 当然,分别从每个监视工具查看图像的能力仍然是一种选择。
在集团装甲车辆的作用下,信息的输出可以考虑到邻近装甲车辆的传感器根据“看到一切 - 看到一切”的原则获得的数据。 来自战场上侦察和战斗部队的所有传感器的信息应显示在上层,处理并以针对每个特定决策级别优化的形式提供给上级指挥部,这将确保高效的指挥和控制。
可以假设,在先进战斗车辆中,创建软件的成本将是开发综合体的成本的很大一部分。 而且它的软件将在很大程度上决定一辆战车的优势。
以数字形式显示图像将允许在不使用专用模拟器的情况下直接在战斗车辆本身中训练装甲车辆人员。 当然,这种训练不会用射击真实武器取代全面训练,但它仍然会大大简化训练人员的训练。 当装甲车的机组人员对抗AI(人工智能 - 计算机程序中的机器人)或在一个虚拟战场中使用大量不同类型的战斗单位时,可以单独进行训练。 在进行军事演习的情况下,真正的战场可以使用装甲软件中的增强现实技术来补充虚拟物体。


在线作战设备模拟器的广泛普及表明,适用于传统计算机的高级装甲车辆的训练软件可以用于潜在未来军人的游戏形式的初步训练。 当然,必须修改此类软件以确保隐藏构成国家和军事机密的信息。
模拟器作为增加兵役吸引力的一种手段,正逐渐成为世界武装部队中的一种流行工具。 根据一些报道,美国海军使用了计算机模拟的鱼叉海战来训练军官 舰队 追溯到XNUMX世纪末。 从那时起,创建逼真的虚拟空间的可能性已经增长了许多倍,而现代战斗车辆的使用通常越来越像计算机游戏,尤其是在涉及无人驾驶(远程控制)军事装备时。
未来装甲车辆的工作人员将能够在复杂,动态变化的环境中做出正确的决策,并以比现有战车更高的速度实施。 这将由工作人员的统一人体工学工作场所以及使用智能系统处理和显示信息来促进。 使用装甲车辆作为模拟器将节省开发和采购专业培训工具的费用,为所有船员提供在虚拟战斗空间或使用增强现实技术进行军事演习的任何时间进行训练的机会。
可以假设,在提高态势感知,优化机组驾驶室的人体工程学和使用高速引导驱动方面实施上述解决方案将允许您在不失去战斗力的情况下放弃其中一名机组成员,例如,您可以结合指挥官和炮手的位置。 然而,装甲车的指挥官可能会被分配一些其他有希望的任务,我们将在下一篇文章中讨论。

MIG-31拦截器驾驶舱内的飞行员位置(左)和导航员操作员(右)
乔布斯人员装甲车
目前,机组人员的工作是高度专业化的 - 一个单独的驾驶员座位,指挥官和炮手的个人工作。 最初,这是由于装甲车辆的布局,包括旋转塔和光学观察设备。 所有机组成员只能访问自己的控制和监视设备,无法执行其他机组成员的功能。
以前在 航空例如,我们可以举出MiG-31战斗机/拦截机或Mi-28N战斗直升机的飞行员和导航员/操作员的工作场所。 通过工作空间的这种安排,机组人员之一的死亡或受伤使得战斗任务无法实现,即使返回基地本身的过程也变得困难。

战斗直升机Mi-28H驾驶舱内的飞行员位置(左)和导航员操作员(右)
目前,开发商正在努力统一船员工作。 这主要是由于多功能显示器的出现,可以从船上的任何智能设备上显示任何必要的信息。
统一飞行员和导航员操作员工作是波音/西科斯基RAH-66科曼奇侦察和攻击直升机的一部分。 此外,RAH-66直升机的飞行员应该能够控制战斗车辆的大多数功能,而无需将手从控制器上移开。 在RAH-66直升机中,计划安装Kaiser-Electronics头盔式集成瞄准系统,能够显示来自前半球观察系统的红外(IR)和地形电视图像或头盔显示器上的地形的三维数字地图,实现“机舱外的眼睛”原理。 头盔式显示器的存在允许您驾驶直升机,武器操作员可以搜索目标而无需查看仪表板。

波音/西科斯基RAH-66科曼奇侦察直升机驾驶室
RAH-66直升机计划已经关闭,但毫无疑问,其实施过程中取得的成就被用于其他计划中,用于制造先进战斗车辆。 在俄罗斯,根据Mi-28UB战斗直升机的创造经验,在Mi-28HM战斗直升机上实施了飞行员和导航员操作员的统一工作场所。 同样对于Mi-28HM,飞行员的头盔正在开发,图像显示在面罩和我们的头盔目标指定系统上,我们在之前讨论过 文章.
具有显示信息能力的头盔,无人驾驶塔和遥控武器模块(DUMV)的外观将允许统一地面战车的工作场所。 所有机组成员(包括驾驶员)的工作场所很可能是透明的。 现代控制系统不需要控制器和执行器之间的机械连接,因此紧凑的方向盘甚至横向低速控制旋钮 - 高精度操纵杆 - 可用于驱动装甲车。

F-22和F-35飞机驾驶舱内的侧向低速控制旋钮
根据未经证实的报道,自2013年开发控制系统以来,就考虑过使用操纵杆替代方向盘或控制杆的可能性。 一个坦克 T-90MS。 此外,据称,Kurganets步兵战车控制面板(BMP)是用Sony Playstation游戏机游戏手柄的图像制成的,但尚未透露此遥控器是设计来控制IFV的运动,还是仅用于控制武器。
因此,为了控制预期战斗车辆的运动,可以考虑使用侧面低速控制旋钮的选项,并且如果发现该选项不可接受,则方向盘缩回到非激活状态。 默认情况下,战斗车辆的运动控制必须与驾驶员一起激活,但如有必要,任何机组成员都应该能够替换他。 战斗车辆控制元件设计的主要规则应该是“手掌始终处于控制之下”的原则。
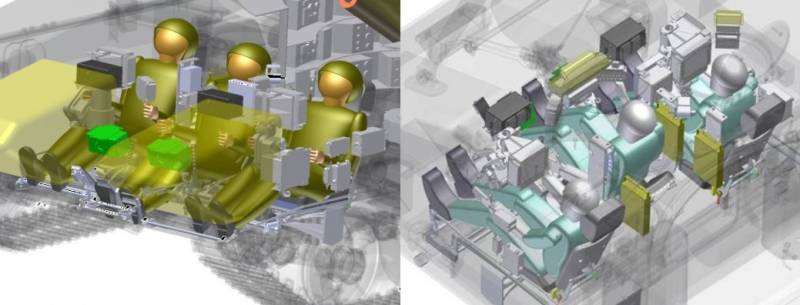
机组成员的统一工作场所应位于与Armata项目中实施的战斗车辆的其他舱室隔离的装甲舱中。
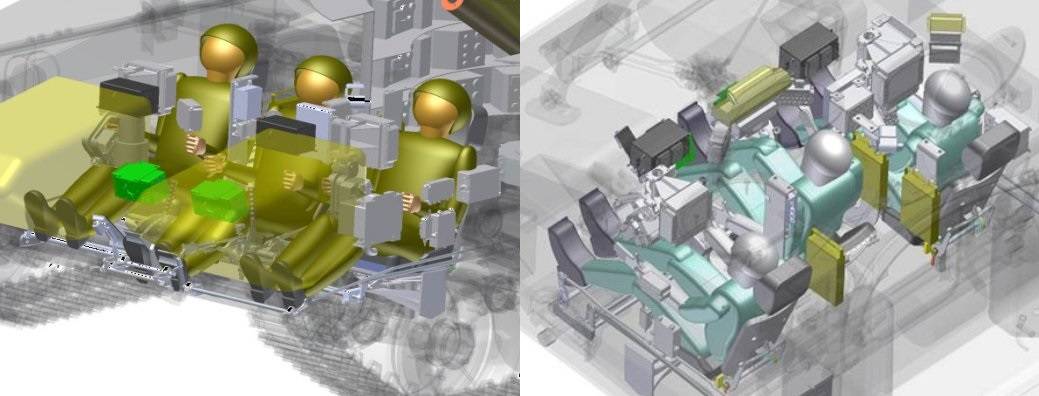
工作人员在“Armata”项目中的位置
固定在减震器上的具有可变倾斜角度的椅子应当在崎岖地形上行驶时减少振动和摇晃的影响。 将来,主动减震器可用于消除振动和振动。 船员座椅可以提供与多区域气候控制相结合的通风。
似乎这样的要求是多余的,因为坦克不是豪华轿车,而是战车。 但现实情况是,未受过训练的新兵配备的军队时间已经无可挽回地消失了。 战斗车辆的复杂性和成本日益增加,需要各自的专业人员参与,他们需要提供舒适的工作场所。 考虑到装甲车的成本,每单位约五千万美元,安装增加船员舒适度的设备不会对总量产生很大影响。 反过来,正常的工作条件将有助于提高船员行动的效率,而不需要被国内的不适分散注意力。
定位与决策
自动化最困难的问题之一是确保人与技术的有效互动。 正是在这个领域,在“定位”和“决定”阶段,NORD周期(观察,定位,决定,行动)可能会出现严重延迟。 要了解情况(方向)并做出有效决策(决策),应以最易于访问和直观的形式显示船员信息。 随着硬件的计算能力的增加和使用基于神经网络的信息分析技术的软件(软件)的出现,可以将先前由人类执行的处理智能数据的一些任务分配给软件和硬件系统。
例如,当攻击ATGM时,装甲车辆的车载计算机可以独立分析来自热成像仪和在紫外(UV)范围内操作的摄像机(火箭发动机轨迹),来自雷达的数据以及可能来自声学传感器的图像,检测并捕获ATGM发射,选择必要的弹药并通知机组人员,之后,可以通过一个或两个团队(武器撤销,射击)自动进行ATGM计算的销毁。

来自Su-101飞机的57X Atoll综合体和Microvista Intevac多光谱摄像机的紫外线紫外线评测系统,可见光范围为150 - 1100 nm
未来装甲车辆的车载电子设备应能够通过其热,UV,光学和雷达签名独立识别潜在目标,计算运动轨迹,根据威胁程度对目标进行排名,并以方便的形式在屏幕或头盔上显示信息。 不充分或相反,冗余信息可能导致决策延迟或在“定向”和“决定”阶段采用错误决策。
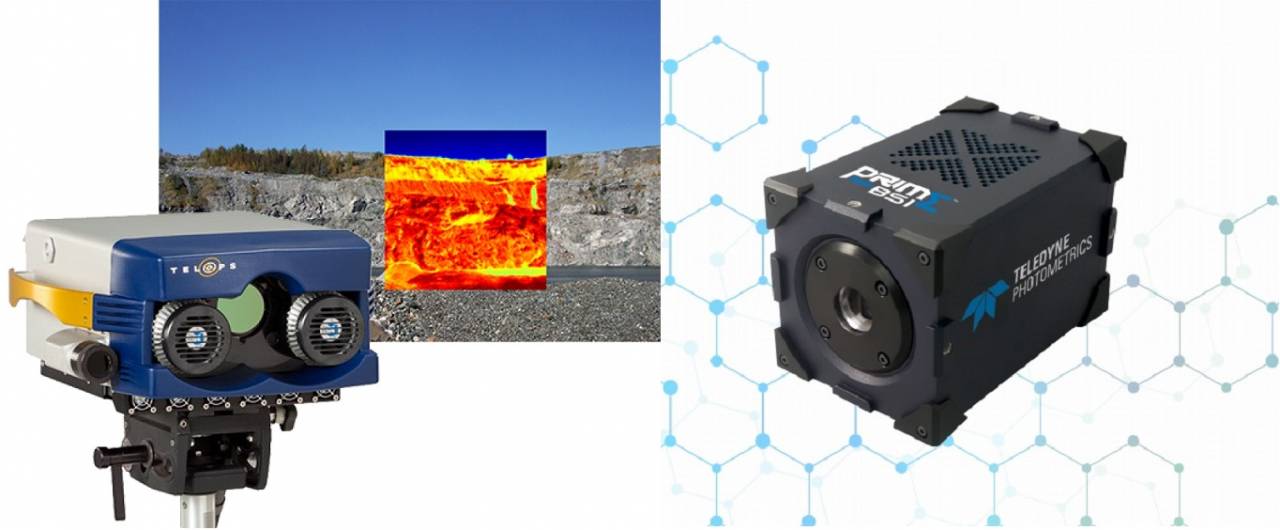
高光谱IR Telops高光谱红外摄像机和高灵敏度紫外sCMOS Prime BSI摄像机
检测紫外线范围内伪装的战斗机
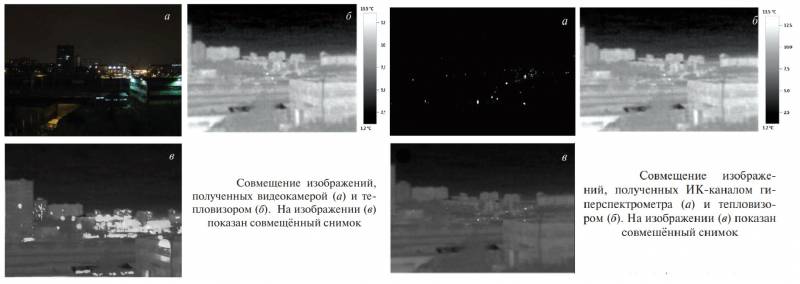
装甲车辆工作人员的重要帮助可以是混合来自不同传感器的信息,并显示在同一屏幕/层上。 换句话说,来自放置在装甲车辆上的每个监视工具的信息应该用于形成尽可能舒适的感知的单个图像。 例如,在白天,来自高分辨率彩色摄像机的视频被用作构建图像的基础。 来自热成像仪的图像用作辅助以突出暖对比元素。 此外,根据来自雷达或UV相机的数据显示图像的附加元素。 在晚上,来自夜视设备的视频图像成为构建图像的基础,因此通过来自其他传感器的信息来补充。

从各种工业传感器接收的图像的组合
这种技术目前甚至在具有多个相机的智能手机中使用,例如,当使用具有较高光敏性的黑白矩阵来改善彩色相机获得的图像的质量时。 应用结合图像和工业用途的技术。 当然,分别从每个监视工具查看图像的能力仍然是一种选择。
在集团装甲车辆的作用下,信息的输出可以考虑到邻近装甲车辆的传感器根据“看到一切 - 看到一切”的原则获得的数据。 来自战场上侦察和战斗部队的所有传感器的信息应显示在上层,处理并以针对每个特定决策级别优化的形式提供给上级指挥部,这将确保高效的指挥和控制。
可以假设,在先进战斗车辆中,创建软件的成本将是开发综合体的成本的很大一部分。 而且它的软件将在很大程度上决定一辆战车的优势。
训练
以数字形式显示图像将允许在不使用专用模拟器的情况下直接在战斗车辆本身中训练装甲车辆人员。 当然,这种训练不会用射击真实武器取代全面训练,但它仍然会大大简化训练人员的训练。 当装甲车的机组人员对抗AI(人工智能 - 计算机程序中的机器人)或在一个虚拟战场中使用大量不同类型的战斗单位时,可以单独进行训练。 在进行军事演习的情况下,真正的战场可以使用装甲软件中的增强现实技术来补充虚拟物体。
T-90坦克船员模拟器

T-72坦克船员模拟器
在线作战设备模拟器的广泛普及表明,适用于传统计算机的高级装甲车辆的训练软件可以用于潜在未来军人的游戏形式的初步训练。 当然,必须修改此类软件以确保隐藏构成国家和军事机密的信息。
模拟器作为增加兵役吸引力的一种手段,正逐渐成为世界武装部队中的一种流行工具。 根据一些报道,美国海军使用了计算机模拟的鱼叉海战来训练军官 舰队 追溯到XNUMX世纪末。 从那时起,创建逼真的虚拟空间的可能性已经增长了许多倍,而现代战斗车辆的使用通常越来越像计算机游戏,尤其是在涉及无人驾驶(远程控制)军事装备时。
发现
未来装甲车辆的工作人员将能够在复杂,动态变化的环境中做出正确的决策,并以比现有战车更高的速度实施。 这将由工作人员的统一人体工学工作场所以及使用智能系统处理和显示信息来促进。 使用装甲车辆作为模拟器将节省开发和采购专业培训工具的费用,为所有船员提供在虚拟战斗空间或使用增强现实技术进行军事演习的任何时间进行训练的机会。
可以假设,在提高态势感知,优化机组驾驶室的人体工程学和使用高速引导驱动方面实施上述解决方案将允许您在不失去战斗力的情况下放弃其中一名机组成员,例如,您可以结合指挥官和炮手的位置。 然而,装甲车的指挥官可能会被分配一些其他有希望的任务,我们将在下一篇文章中讨论。
- 安德烈米特罗法诺夫
- otvaga2004.ru,airwar.ru,topwar.ru,npovk.ru,sfw.so
- 消防支援坦克,BMPT“终结者”和OODA约翰博伊德的循环
装甲车对步兵。 谁更快:坦克或步兵?
提高装甲战车队的态势感知能力
信息