在不涉及空军航空的情况下确保防空系统在低空飞行目标上的工作
地球表面的曲率和地形的不平坦地形严重限制了地面和舰载防空导弹系统探测和摧毁低空飞行突击车(EIS)的能力。 如何有效地确保在低空飞行目标上发射防空导弹的可能性?
一种选择是将雷达放置在提升桅杆装置(PMU)上。 如果我们将雷达放置在15米的高度,那么在高于地面50米的高度移动的飞机(LA)的可见范围将是41 km。 将PMU的高度增加到50仪表将使理论可见范围仅增加13 km(至54 km),而此类设备的复杂性和庞大性将增长到更大程度。
对于Pantsir-SM型的短程防空系统来说,这似乎很正常吗? 但在实践中,不平坦的地形,森林,建筑物以及其他自然和人为障碍物将会多次降低此值。
为确保探测低空飞行目标,升高雷达所需的最小高度是多少?
必须提高检测装置以补偿地形的不规则性的高度可以在每种特定情况下变化。 在大多数情况下,俄罗斯在100-200 km范围内的平坦区域的高程差异不超过100-200米。 在山区,差异可能明显更大,并且难以指定具体值。
通常对于短距离SAM系统(高达40-50 km),您可以采取必要的高度来补偿100仪表中的不平坦地形;对于中程SAM系统(高达50-150 km),补偿不平坦地形所需的高度将为200米。
因此,用于检测短程SAM系统的低飞行目标的雷达放置的最小高度约为200米,对于中程SAM系统,约为700米。 确保超视距远程防空系统的雷达高度应与DRLO飞机的高度相当,大约为10 000 m,在这种情况下,地形的价值要小得多。
这些高度使PMU的使用变得不可能,但还有其他几种方法可以“超越地平线”。
这种方法之一是使用气球。 在美国,JLENS项目正在实施中。 该项目规定在固定在该国某些地点的浮空器上部署雷达和光学侦察设备,以便探测低空飞行的巡航导弹。 气球的高度为3 - 4,5 km,有效载荷质量约为3吨。 空中目标的探测范围应为550 km,地面目标为225 km。 除了探测之外,JLENS气球还应为地对空导弹提供超视距目标指定。 为了将气球保持在适当的位置和数据交换,应该使用包括碳编织物中的电源电缆和光纤数据传输电缆的电缆。

在我们正在考虑的任务框架内,该项目有几个缺点:气球对于车辆的永久移动来说不是很方便,并且如果可能的话,应该绑定到某个点,这排除了用移动防空系统改变位置的可能性并且是不可接受的。 此外,气球的巨大尺寸(长度超过70米)理论上可以干扰其在强风中的操作。
另一方面,这个概念本身很有前景。 雷达可以安装在航空雷达上,可以覆盖低空飞行超高压雷达的静止物体,主要包括洲际弹道导弹(ICBM)地雷,潜艇基地,弹道导弹载体,战略轰炸机的机场,核电站以及该国武装部队和基础设施的其他关键要素。 。
因此,尽管浮空器不是为防空系统提供击中地平线以外目标的可能性的最佳手段,但它们可以在覆盖特别重要的静止物体方面发挥重要作用,防止低空飞行的敌人超高压突然袭击。 它们的主要优点是可以在空中准连续停留而不会产生大量的燃料和电力成本。
在俄罗斯,这种气球由RosAeroSystems开发。 特别地,可以考虑高容量系绳气球“PUMA”。 Puma气球被设计为雷达载体,用于在5天内从海拔高达30 km的全天候雷达监视,无需着陆。
估计的空中目标探测和跟踪半径为300-350 km。 气球必须能承受高达46 m / s的飓风和直接雷击。 气球在上升,下降和停放在工作高度时由缆绳固定,它还为车载系统和有效载荷提供电力,功率高达40 kW,以及闪电和静电。 PUMA气球的有效载荷高达2250 kg。

显然,俄罗斯武装部队正朝着这个方向努力:
关注Almaz-Antey的情况,气球和飞艇不仅可以警告空袭的威胁,还需要在已确定的目标上配备有主动雷达制导头(ARGSN)的直接防空导弹(SAM)。
让我们回到防空系统。 首先,我们将考虑短程和中程防空系统,为此需要将雷达分别提升到200和700仪表的高度。
在2018开始时,波音公司推出了电动无人四轴飞行器货机的原型。 该无人机设计用于测试和调试创建下一代货运客机所需的技术。 经验丰富的无人机4,57仪表的长度,5,49仪表的宽度,1,22仪表的高度,重量(包括电池的重量)为339千克。 有效载荷 - 高达226 kg。 该设计包括四个带八个转子的电动机。
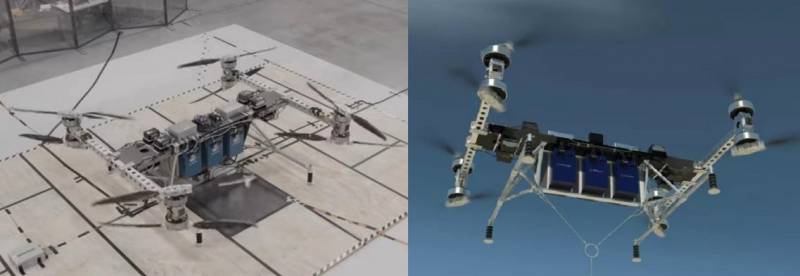
波音公司的四轴飞行器演示
电动四轴飞行器 - 无人机可以成为检测陆基和海基防空导弹系统低空飞行EAS的有效解决方案。
电动四轴飞行器 - 无人机应放在车载上,还应放置柴油发电机组(DGU)为无人机提供电力。 不幸的是,目前还不知道有经验的四轴飞行器,电池充电时间和飞行时间的电动机的功率。
可以考虑两种选择:
- 在第一个变型中,没有需要可充电电池来维持长途飞行,从载体车辆提供电源,只有一个小型备用电池用于无人机的紧急着陆,据推测,这个选项可以被认为是最佳的;
- 如果为四轴飞行器提供必要动力所需的电缆重量太大,则可以使用第二种选择,在这种情况下,应将具有快速充电功能的电池或超级电容器(离子电阻器)放置在四轴飞行器上。
为了确保四个短距离防空系统保持空中连续性,至少需要两辆配备无人机的运载工具。 无人机在空中的时间仅受柴油发电机组燃料可用性的限制。
可以在汽油或柴油活塞发动机的基础上实施无人机而不是电动四轴飞行器。 在俄罗斯,SKYF Technology致力于开发和生产此类解决方案,为客户提供SKYF垂直起降无人机。 目前,SKYF无人机有效载荷容量为250千克,有望增加到400千克。 无人机飞行高度为3000米。

飞行演示SKYF无人机
介绍SKYF无人机
早些时候,地平线由Horizon Air S-100直升机型无人机宣布,配备基于奥地利Schiebel Camcopter S-100的圆形回顾雷达。 安装在机身底部的无人机雷达循环评论“蜂鸟”正在与莫斯科“无线电物理研究所”合作开发。 雷达设备的总质量应不大于6,5 kg,在圆形视图模式(UAV悬挂)中所需的范围不小于200 km,在合成孔径模式下不小于20 km。
该无人机的有效载荷太小(35 kg),以便容纳具有可接受特性的雷达,这可能是一个有趣的概念。 空中连续几小时6。

四轴飞行器无人机的给定示例不能直接参与雷达的放置,因为它们具有相对适中的有效载荷,但毫无疑问,它们的设计将得到积极开发和改进。 首先,它与电动quadrocopters-UAV有关。
四轴飞行器型无人机或直升机型无人机-DRLO型的主要要求应该是高可靠性和长期停留在空中的可能性,确保指定的飞行性能(LTH),以及高运行寿命和低飞行小时。
对于远程无人机,垂直起降无人机将不再是一种有效且充足的侦察工具,因为雷达放置高度,为了达到约400 km的范围,必须超过10 000米。
据推测,作为远程防空导弹系统的飞行雷达,可以使用长持续时间,飞机类型,中等或长度尺寸的无人机。
有前途的角色的候选人之一 无人机-DRLO可成为起飞重量5吨、有效载荷1-2吨的牵牛星无人机。 该无人机是索科尔设计局(喀山)与 Transas 公司共同开发的 Altius-M 研究项目的一部分。 其飞行时间应长达 48 小时,飞行距离为 10 公里。 000年,牵牛星无人机项目转移到民用乌拉尔工厂 航空“(UZGA)。 Altair无人机飞行测试应于2019年开始。

这种类型的设备正在其他国家开发。 特别是,中国公司CETC正在开发JY-300无人机。 中型设备应成为共形天线的载体并用作AWED无人驾驶车辆。 根据初步数据,JY-300无人机的起飞重量约为1300 kg,可携带400 kg的有效载荷。 他的飞行时间可达12小时,最高可达7,6 km。 在这种无人机雷达的设计中,应该可以远距离探测空中和海上目标。

俄罗斯中型和大型无人机受到许多问题的困扰,包括缺乏紧凑,强大和经济的国产发动机,缺乏现代航空电子设备。 最重要的问题之一是缺乏具有全球覆盖范围的高速卫星数据传输通道,允许无人机进行管理,并在离基点很远的地方接收无人机的情报信息。
使用具有长飞行持续时间的DRLO UAV不需要存在这样的通道。 一般而言,远程无人机的远程防空系统的操作可以如下所示:
远程无人机DRLO从机场起飞,进入梯队防空阵地的巡逻区。 所有信息都来自远程防空系统运营商,并且通过指挥和控制点指向作为联合梯队防空系统一部分的其他防空系统运营商。 无人机的飞行应主要在给定轨迹上以自动模式进行。 一个远程防空系统应该包括两个DRLO无人机。 在这种情况下,他们可以在防空导弹系统的位置上轮换他们的任务,持续时间为36-48小时,具体取决于家庭机场的距离。
远程无人机DRLO的要求与短程和中程防空导弹系统的无人机相同 - 使用寿命长,飞行小时成本低。
可能会出现这样的问题:该文章的标题是指防空系统在不涉及空军飞机的情况下对低空飞行目标的工作,而长期飞行的无人机明确指的是航空。 这里的问题在于部门联盟。 在美国,通过军队和空军之间约翰逊 - 麦康奈尔的协议,直升机不属于空军,直接隶属于美国陆军,并按照其利益行事(美国军队和空军之间的飞机划分得很好) 这里)。 因此,我们的情况是,无人机指的是特定的防空导弹系统,不允许将其空军用于其他目的。
使用直升机型DRLO无人机和长持续时间DFLO无人机将允许您创建密集的雷达地形覆盖范围,并确保目标定位到具有最大射程的ARGSN和IR GOS的导弹。
据推测,两个短距离防空系统应该有一辆带有直升机型AWAC无人机或两辆用于四个防空系统的汽车。 中程防空系统应包括两辆配备直升机型无人机的车辆。 两架远程无人机无人机应与远程防空系统有关。
在危险期间或在敌对行动开始时,长途无人机必须在防空导弹系统的位置上进行连续巡逻。 来自短程和中程防空导弹系统的直升机型无人机应该在运载工具上,准备立即发射。 如果检测到空中威胁,应在几分钟内发射直升机型无人机。
无人机本身的成本及其飞行时间传统上明显低于有人驾驶飞机和直升机的成本,这使得这项任务在经济上具有吸引力。 从技术上讲,拟议的概念也没有任何不可克服的问题。
对于高重要性的静止物体,可以使用AEW气球。 对于配备有空中预警气球的防空设施,不需要长时间无人机,可以将其排除在远程防空导弹系统之外,也可以作为备用侦察和目标指定工具准备离开。
以前,仅考虑出于地面防空系统的利益使用无人机。 但是,为了海军舰艇的防空,使用四轴飞行器和飞行时间长的无人机同样重要,也许更为重要。 舰队 (海军) 鉴于我们没有航空母舰,也没有空中预警飞机,因此,由于对低空目标的探测范围存在物理限制,现代俄罗斯舰船无论空中防御如何,都无法有效防御空中攻击。
在俄罗斯海军舰艇上使用直升机型无人机将有可能显着推动低空飞行目标的破坏线。 向海军舰艇所在地区发送一支持续时间和飞行距离较长的无人机将使他们有更多的能力侦察敌军并向导弹发射目标指定 武器 远程。

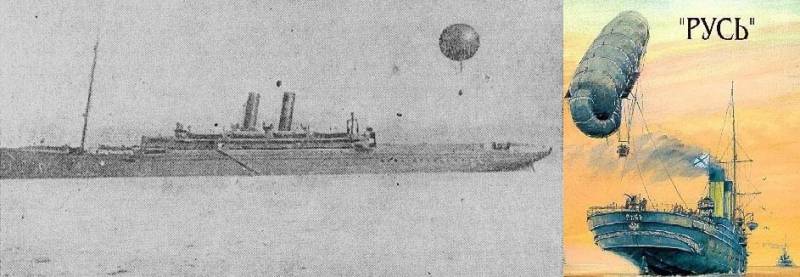
不能排除为了海军的利益而使用气球和飞艇,特别是因为 历史的 俄罗斯舰队有使用气球的例子。
没有远距离攻击低空飞行目标的地面和地面防御将被粉碎。
为了解决短距离和中距离SAM系统的这个问题,有必要制造一种直升机型DRLO UAV,最好是通过来自运载车辆的电缆供电。
对于远程防空系统,有必要加强长时无人机无人机的发展。
对于高重要性的静止物体,可以使用AEW气球。
所有上述系统(直升机型无人机,长时间无人机无人机和预警无人机)对于提高地面防空系统的效率和生存率至关重要,但对俄罗斯海军的舰船而言。
爬得更高
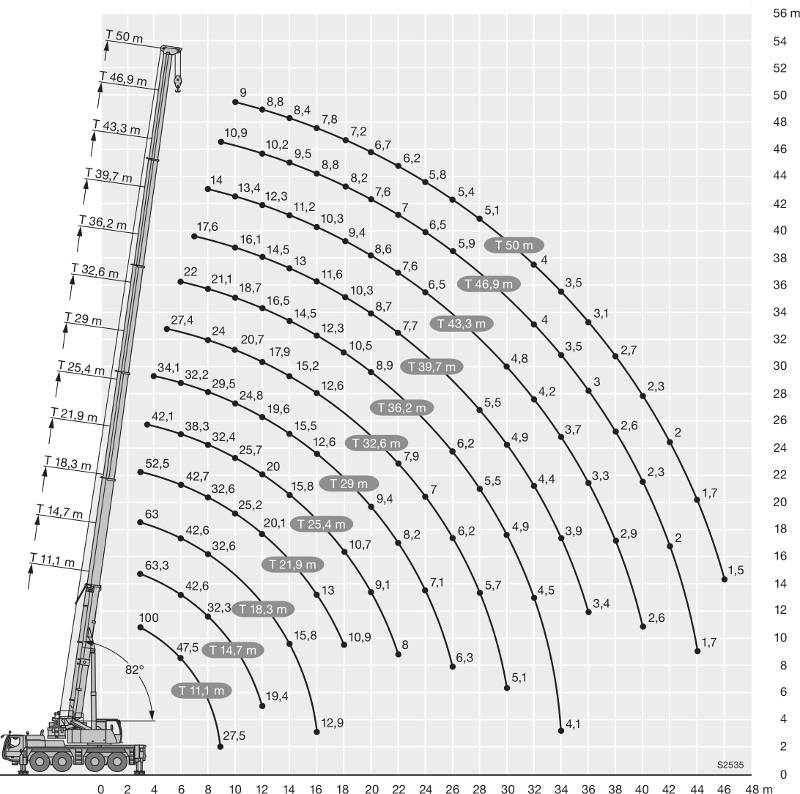
一种选择是将雷达放置在提升桅杆装置(PMU)上。 如果我们将雷达放置在15米的高度,那么在高于地面50米的高度移动的飞机(LA)的可见范围将是41 km。 将PMU的高度增加到50仪表将使理论可见范围仅增加13 km(至54 km),而此类设备的复杂性和庞大性将增长到更大程度。
现代汽车起重机的功能可以将9吨的负载提升到高达50米的高度,这使得可以放置在类似雷达设计的PMU上以检测低空飞行目标
对于Pantsir-SM型的短程防空系统来说,这似乎很正常吗? 但在实践中,不平坦的地形,森林,建筑物以及其他自然和人为障碍物将会多次降低此值。
为确保探测低空飞行目标,升高雷达所需的最小高度是多少?
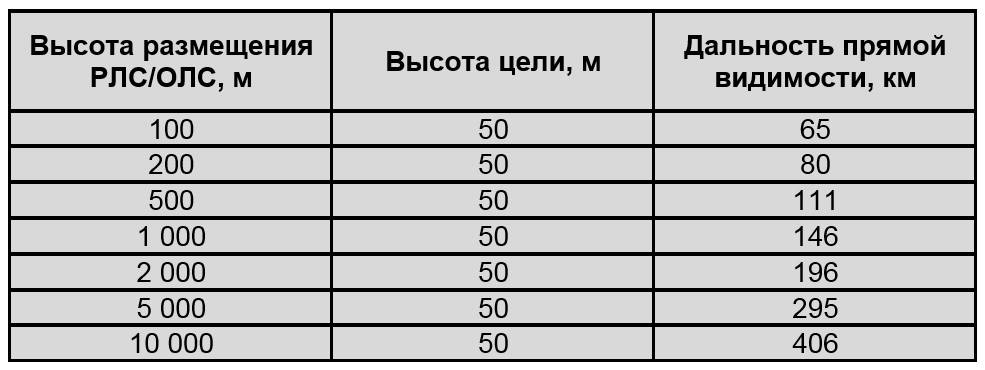
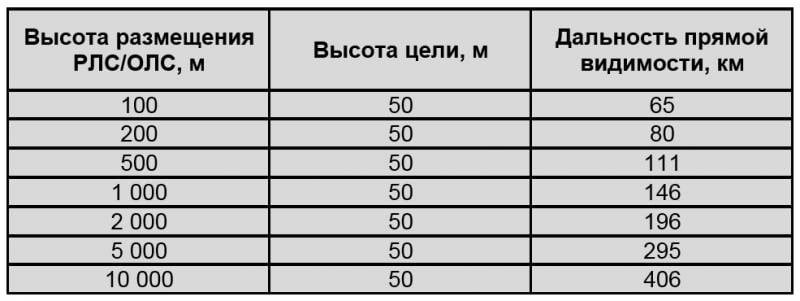
直接可见范围取决于检测装置的放置高度,不包括地形
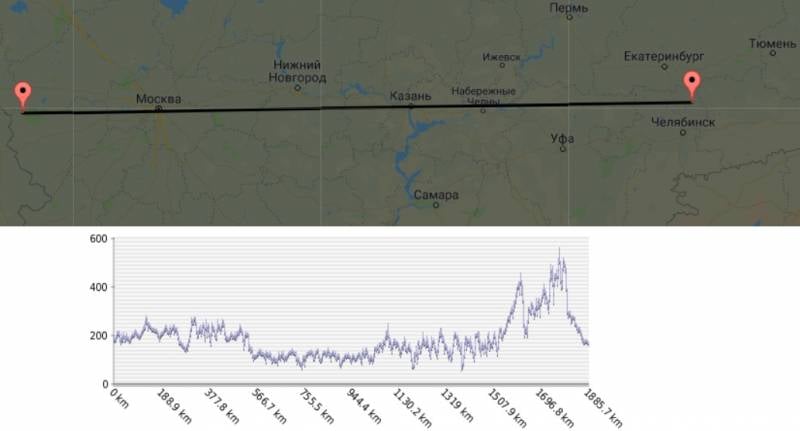
必须提高检测装置以补偿地形的不规则性的高度可以在每种特定情况下变化。 在大多数情况下,俄罗斯在100-200 km范围内的平坦区域的高程差异不超过100-200米。 在山区,差异可能明显更大,并且难以指定具体值。
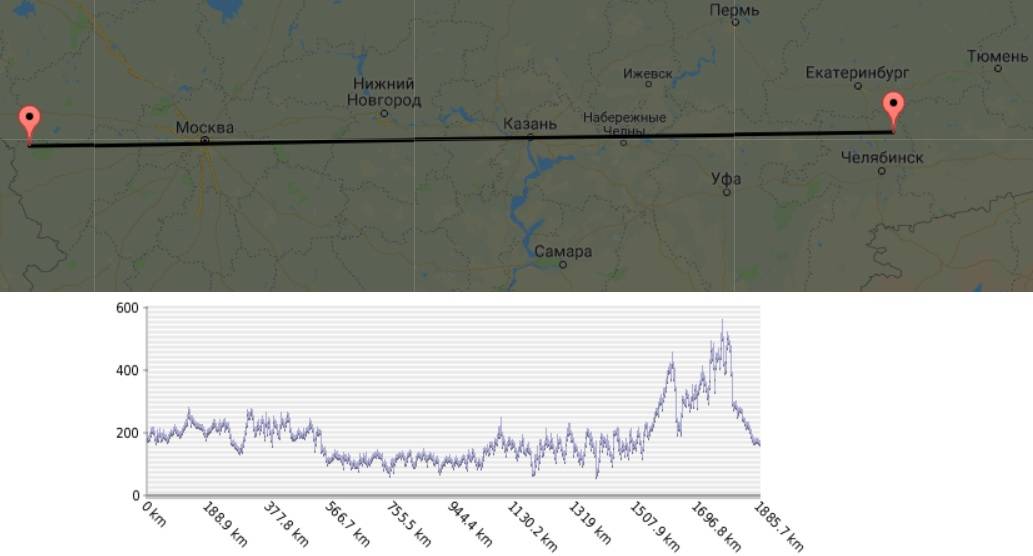
高程剖面
通常对于短距离SAM系统(高达40-50 km),您可以采取必要的高度来补偿100仪表中的不平坦地形;对于中程SAM系统(高达50-150 km),补偿不平坦地形所需的高度将为200米。
因此,用于检测短程SAM系统的低飞行目标的雷达放置的最小高度约为200米,对于中程SAM系统,约为700米。 确保超视距远程防空系统的雷达高度应与DRLO飞机的高度相当,大约为10 000 m,在这种情况下,地形的价值要小得多。
这些高度使PMU的使用变得不可能,但还有其他几种方法可以“超越地平线”。
浮空器雷达
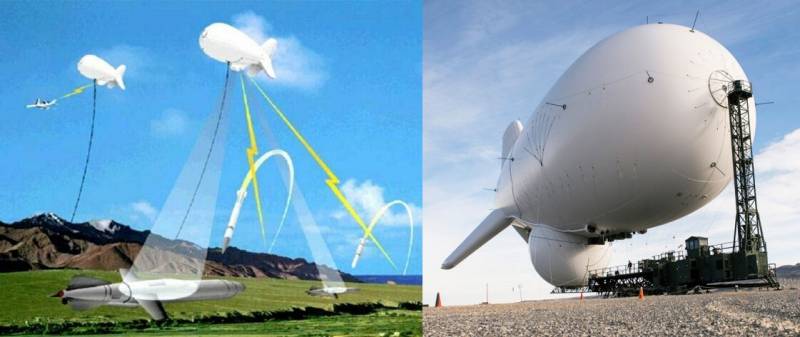
这种方法之一是使用气球。 在美国,JLENS项目正在实施中。 该项目规定在固定在该国某些地点的浮空器上部署雷达和光学侦察设备,以便探测低空飞行的巡航导弹。 气球的高度为3 - 4,5 km,有效载荷质量约为3吨。 空中目标的探测范围应为550 km,地面目标为225 km。 除了探测之外,JLENS气球还应为地对空导弹提供超视距目标指定。 为了将气球保持在适当的位置和数据交换,应该使用包括碳编织物中的电源电缆和光纤数据传输电缆的电缆。
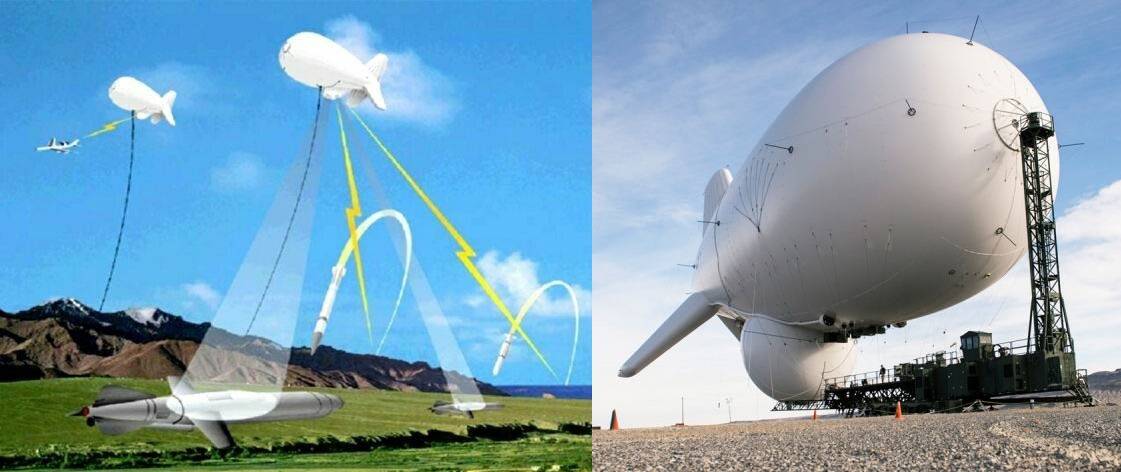
JLENS项目的运作原则和气球

用于编织碳纤维预制件的机器也可用于制造用于高强度电缆的护套。
在我们正在考虑的任务框架内,该项目有几个缺点:气球对于车辆的永久移动来说不是很方便,并且如果可能的话,应该绑定到某个点,这排除了用移动防空系统改变位置的可能性并且是不可接受的。 此外,气球的巨大尺寸(长度超过70米)理论上可以干扰其在强风中的操作。
另一方面,这个概念本身很有前景。 雷达可以安装在航空雷达上,可以覆盖低空飞行超高压雷达的静止物体,主要包括洲际弹道导弹(ICBM)地雷,潜艇基地,弹道导弹载体,战略轰炸机的机场,核电站以及该国武装部队和基础设施的其他关键要素。 。
因此,尽管浮空器不是为防空系统提供击中地平线以外目标的可能性的最佳手段,但它们可以在覆盖特别重要的静止物体方面发挥重要作用,防止低空飞行的敌人超高压突然袭击。 它们的主要优点是可以在空中准连续停留而不会产生大量的燃料和电力成本。
在俄罗斯,这种气球由RosAeroSystems开发。 特别地,可以考虑高容量系绳气球“PUMA”。 Puma气球被设计为雷达载体,用于在5天内从海拔高达30 km的全天候雷达监视,无需着陆。
估计的空中目标探测和跟踪半径为300-350 km。 气球必须能承受高达46 m / s的飓风和直接雷击。 气球在上升,下降和停放在工作高度时由缆绳固定,它还为车载系统和有效载荷提供电力,功率高达40 kW,以及闪电和静电。 PUMA气球的有效载荷高达2250 kg。
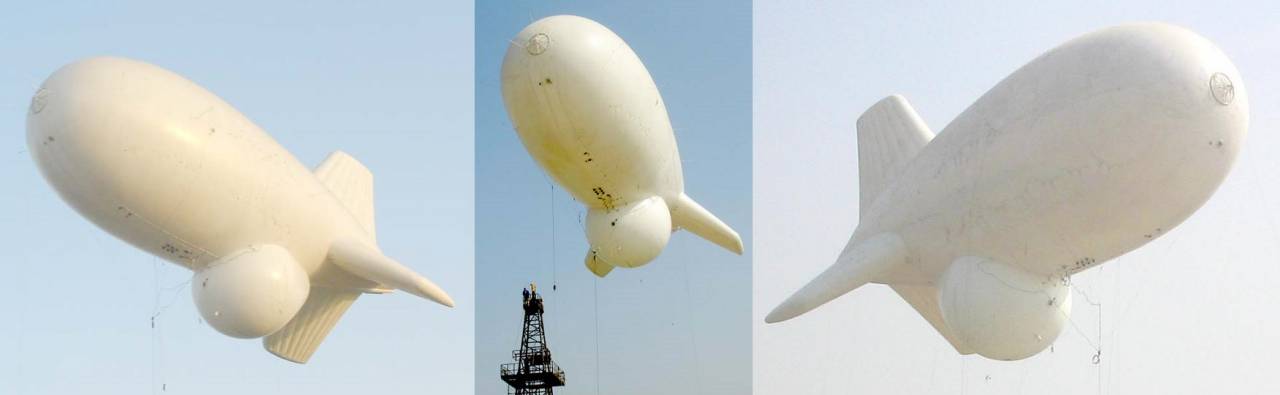
附加气球的大容量“PUMA”
显然,俄罗斯武装部队正朝着这个方向努力:
7月,2015,无线电电子技术关注(KRET)第一副总干事弗拉基米尔米切耶夫告诉RIA 新闻 关于飞艇项目的工作开始,以满足国家导弹防御的需要。 它可以成为导弹攻击预警系统(EWS)的一个完整元素,它现在由两个梯队组成 - 轨道卫星星座和地面雷达站。
关注Almaz-Antey的情况,气球和飞艇不仅可以警告空袭的威胁,还需要在已确定的目标上配备有主动雷达制导头(ARGSN)的直接防空导弹(SAM)。
Quadcopters和其他无人机(UAV)垂直起飞和降落
让我们回到防空系统。 首先,我们将考虑短程和中程防空系统,为此需要将雷达分别提升到200和700仪表的高度。
在2018开始时,波音公司推出了电动无人四轴飞行器货机的原型。 该无人机设计用于测试和调试创建下一代货运客机所需的技术。 经验丰富的无人机4,57仪表的长度,5,49仪表的宽度,1,22仪表的高度,重量(包括电池的重量)为339千克。 有效载荷 - 高达226 kg。 该设计包括四个带八个转子的电动机。
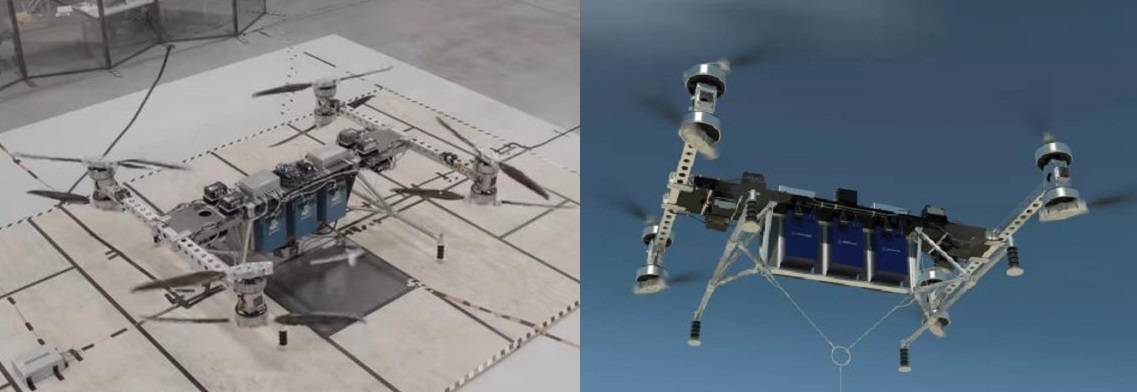
波音的货物四轴飞行器
波音公司的四轴飞行器演示
电动四轴飞行器 - 无人机可以成为检测陆基和海基防空导弹系统低空飞行EAS的有效解决方案。
电动四轴飞行器 - 无人机应放在车载上,还应放置柴油发电机组(DGU)为无人机提供电力。 不幸的是,目前还不知道有经验的四轴飞行器,电池充电时间和飞行时间的电动机的功率。
可以考虑两种选择:
- 在第一个变型中,没有需要可充电电池来维持长途飞行,从载体车辆提供电源,只有一个小型备用电池用于无人机的紧急着陆,据推测,这个选项可以被认为是最佳的;
- 如果为四轴飞行器提供必要动力所需的电缆重量太大,则可以使用第二种选择,在这种情况下,应将具有快速充电功能的电池或超级电容器(离子电阻器)放置在四轴飞行器上。
为了确保四个短距离防空系统保持空中连续性,至少需要两辆配备无人机的运载工具。 无人机在空中的时间仅受柴油发电机组燃料可用性的限制。
可以在汽油或柴油活塞发动机的基础上实施无人机而不是电动四轴飞行器。 在俄罗斯,SKYF Technology致力于开发和生产此类解决方案,为客户提供SKYF垂直起降无人机。 目前,SKYF无人机有效载荷容量为250千克,有望增加到400千克。 无人机飞行高度为3000米。

汽油无人机垂直起降
飞行演示SKYF无人机
介绍SKYF无人机
早些时候,地平线由Horizon Air S-100直升机型无人机宣布,配备基于奥地利Schiebel Camcopter S-100的圆形回顾雷达。 安装在机身底部的无人机雷达循环评论“蜂鸟”正在与莫斯科“无线电物理研究所”合作开发。 雷达设备的总质量应不大于6,5 kg,在圆形视图模式(UAV悬挂)中所需的范围不小于200 km,在合成孔径模式下不小于20 km。
该无人机的有效载荷太小(35 kg),以便容纳具有可接受特性的雷达,这可能是一个有趣的概念。 空中连续几小时6。

Horizon制造的直升机型无人机,带有圆形观察雷达
四轴飞行器无人机的给定示例不能直接参与雷达的放置,因为它们具有相对适中的有效载荷,但毫无疑问,它们的设计将得到积极开发和改进。 首先,它与电动quadrocopters-UAV有关。
四轴飞行器型无人机或直升机型无人机-DRLO型的主要要求应该是高可靠性和长期停留在空中的可能性,确保指定的飞行性能(LTH),以及高运行寿命和低飞行小时。
高空无人机
对于远程无人机,垂直起降无人机将不再是一种有效且充足的侦察工具,因为雷达放置高度,为了达到约400 km的范围,必须超过10 000米。
据推测,作为远程防空导弹系统的飞行雷达,可以使用长持续时间,飞机类型,中等或长度尺寸的无人机。
有前途的角色的候选人之一 无人机-DRLO可成为起飞重量5吨、有效载荷1-2吨的牵牛星无人机。 该无人机是索科尔设计局(喀山)与 Transas 公司共同开发的 Altius-M 研究项目的一部分。 其飞行时间应长达 48 小时,飞行距离为 10 公里。 000年,牵牛星无人机项目转移到民用乌拉尔工厂 航空“(UZGA)。 Altair无人机飞行测试应于2019年开始。

原型无人机Altair
这种类型的设备正在其他国家开发。 特别是,中国公司CETC正在开发JY-300无人机。 中型设备应成为共形天线的载体并用作AWED无人驾驶车辆。 根据初步数据,JY-300无人机的起飞重量约为1300 kg,可携带400 kg的有效载荷。 他的飞行时间可达12小时,最高可达7,6 km。 在这种无人机雷达的设计中,应该可以远距离探测空中和海上目标。

原型无人机DRLO JY-300中国公司CETC
俄罗斯中型和大型无人机受到许多问题的困扰,包括缺乏紧凑,强大和经济的国产发动机,缺乏现代航空电子设备。 最重要的问题之一是缺乏具有全球覆盖范围的高速卫星数据传输通道,允许无人机进行管理,并在离基点很远的地方接收无人机的情报信息。
使用具有长飞行持续时间的DRLO UAV不需要存在这样的通道。 一般而言,远程无人机的远程防空系统的操作可以如下所示:
远程无人机DRLO从机场起飞,进入梯队防空阵地的巡逻区。 所有信息都来自远程防空系统运营商,并且通过指挥和控制点指向作为联合梯队防空系统一部分的其他防空系统运营商。 无人机的飞行应主要在给定轨迹上以自动模式进行。 一个远程防空系统应该包括两个DRLO无人机。 在这种情况下,他们可以在防空导弹系统的位置上轮换他们的任务,持续时间为36-48小时,具体取决于家庭机场的距离。
远程无人机DRLO的要求与短程和中程防空导弹系统的无人机相同 - 使用寿命长,飞行小时成本低。
可能会出现这样的问题:该文章的标题是指防空系统在不涉及空军飞机的情况下对低空飞行目标的工作,而长期飞行的无人机明确指的是航空。 这里的问题在于部门联盟。 在美国,通过军队和空军之间约翰逊 - 麦康奈尔的协议,直升机不属于空军,直接隶属于美国陆军,并按照其利益行事(美国军队和空军之间的飞机划分得很好) 这里)。 因此,我们的情况是,无人机指的是特定的防空导弹系统,不允许将其空军用于其他目的。
梯队防空与无人机无人机
使用直升机型DRLO无人机和长持续时间DFLO无人机将允许您创建密集的雷达地形覆盖范围,并确保目标定位到具有最大射程的ARGSN和IR GOS的导弹。
据推测,两个短距离防空系统应该有一辆带有直升机型AWAC无人机或两辆用于四个防空系统的汽车。 中程防空系统应包括两辆配备直升机型无人机的车辆。 两架远程无人机无人机应与远程防空系统有关。
在危险期间或在敌对行动开始时,长途无人机必须在防空导弹系统的位置上进行连续巡逻。 来自短程和中程防空导弹系统的直升机型无人机应该在运载工具上,准备立即发射。 如果检测到空中威胁,应在几分钟内发射直升机型无人机。
无人机本身的成本及其飞行时间传统上明显低于有人驾驶飞机和直升机的成本,这使得这项任务在经济上具有吸引力。 从技术上讲,拟议的概念也没有任何不可克服的问题。
对于高重要性的静止物体,可以使用AEW气球。 对于配备有空中预警气球的防空设施,不需要长时间无人机,可以将其排除在远程防空导弹系统之外,也可以作为备用侦察和目标指定工具准备离开。
无人机DRLO用于舰队
以前,仅考虑出于地面防空系统的利益使用无人机。 但是,为了海军舰艇的防空,使用四轴飞行器和飞行时间长的无人机同样重要,也许更为重要。 舰队 (海军) 鉴于我们没有航空母舰,也没有空中预警飞机,因此,由于对低空目标的探测范围存在物理限制,现代俄罗斯舰船无论空中防御如何,都无法有效防御空中攻击。
在俄罗斯海军舰艇上使用直升机型无人机将有可能显着推动低空飞行目标的破坏线。 向海军舰艇所在地区发送一支持续时间和飞行距离较长的无人机将使他们有更多的能力侦察敌军并向导弹发射目标指定 武器 远程。

英国船Dreadnought 2050的概念与无人机连接到船上的碳纳米管电缆和超低温冷却超导电缆
不能排除为了海军的利益而使用气球和飞艇,特别是因为 历史的 俄罗斯舰队有使用气球的例子。
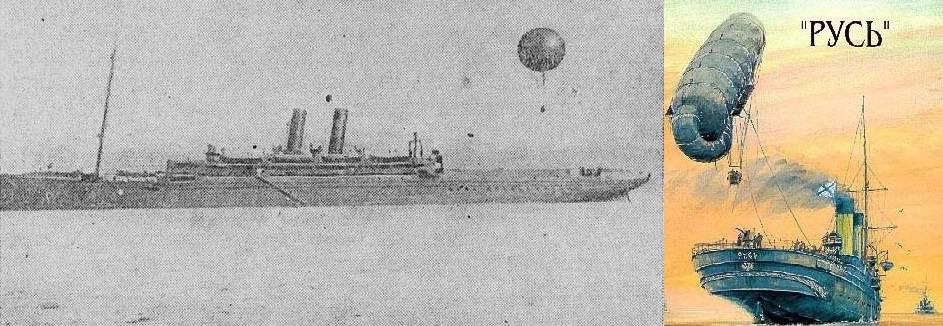
巡洋舰“Rus”带有附加的浮空器
发现
没有远距离攻击低空飞行目标的地面和地面防御将被粉碎。
为了解决短距离和中距离SAM系统的这个问题,有必要制造一种直升机型DRLO UAV,最好是通过来自运载车辆的电缆供电。
对于远程防空系统,有必要加强长时无人机无人机的发展。
对于高重要性的静止物体,可以使用AEW气球。
所有上述系统(直升机型无人机,长时间无人机无人机和预警无人机)对于提高地面防空系统的效率和生存率至关重要,但对俄罗斯海军的舰船而言。
信息