国内无人航空(2的一部分)

正如在审查的第一部分中已经提到的那样,在战后的头几年中,带有活塞发动机的无线电遥控飞机被积极用于确保新型武器的测试和防空部队的作战训练。 但是,在第二次世界大战期间制造的飞机大部分资源很少,战争结束后的几年中,大多数飞机失修了。 此外,由于发展迅速 航空 在40年代末和50年代初,测试和训练所需的目标与潜在敌方的现代战斗机所对应的飞行速度相对应。 在最严格的测试中,使用了从资源中飞出的MiG-15,MiG-17无线电遥控战斗机和Il-28轰炸机。 但是,重新装备串行汽车非常昂贵,此外,当时很少有足够现代化的飞机可以将目标用作目标。
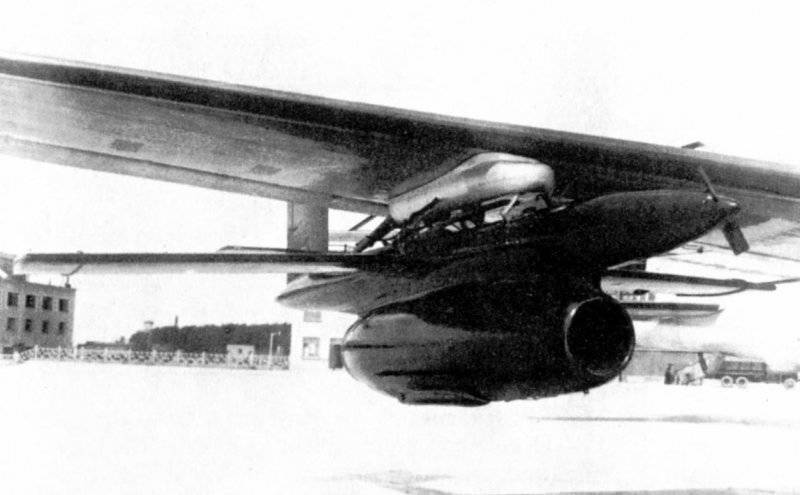
在这方面,在1950,空军司令Marshal K.A. Vershinin建议制造无线电控制目标。 6月,颁布了一项政府法令,根据该法令,这项工作在S.A.的指导下委托给OKB-301。 Lavochkin。 特别注意降低产品的成本,专为一个“出击”而设计。 在设计接收初步名称“产品201”的无线电控制目标时,OKB-301专家采取了最大限度的简化方法。 对于目标飞机,他们选择了廉价的直通式喷气发动机RD-900(直径900 mm),用于汽油。 在发动机干重320 kg的情况下,以240 m / s的速度计算的推力和5000米的高度为625 kgf。 冲压式抛光机RD-900的资源约为40分钟。 设备上没有燃油泵,来自油箱的燃油由一个由气压蓄能器操作的喷射系统供给。 为了最大限度地简化生产,机翼和尾部组件直接进行。 为了给无线电指令设备供电,使用在设备机头中具有风力涡轮机驱动的DC发电机。 “201产品”中最昂贵的部件是无线电控制设备和自动驾驶仪AP-60。 无人目标的出现非常不起眼,但完全符合其目的。 为了发射空中目标,它打算使用四引擎远程轰炸机Tu-4,一个目标可以放置在每个平面下。

Tu-4悬挂无人目标
“产品201”的飞行测试于5月1953开始,位于Akhtubinsk附近的试验场。 州测试于10月1954结束。 在测试期间,我们设法获得905 km / h的最大速度和实际上限 - 9750米。 用于无人驾驶飞机的460 l燃料箱仅足以用于8,5分钟的飞行,而冲压式喷气发动机在4300 - 9300高度处可靠地发射。 根据测试结果,军方建议将发动机正常运行时间增加到15分钟,通过安装角落反射器和在翼尖上安装示踪器来增加EPR。
主要缺点是设备的长期准备使用。 特别费力的是暂停在航母上。 在测试期间不可能实现降落伞救援系统的可靠操作。

为了节省目标以便重复使用,决定将其从规划到机身下方的发动机进行种植。 飞行试验证实这是可能的,但是在这种着陆之后,由于发动机舱的变形,需要更换冲压式喷气发动机。
La 17在手推车上
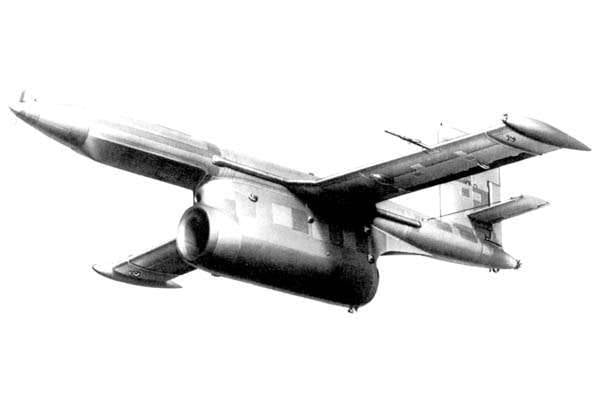
正式采用“产品201”后,获得了La 17的称号。 在Orenburg的工厂编号47建立了目标的连续生产。 第一批生产机器的交付始于1956年。 为了在喀山航空工厂编号17中使用La-22,对6架Tu-4轰炸机进行了改进。 La-17的系列结构一直持续到1964年,生产计划包括每年向300生产无人驾驶目标。
La 17位于Tu-4的翼下
目标完全满足其目的,但最终50-X,它变得清晰,活塞涂4即将退役和空气启动系统需要太多的时间来使用和相当昂贵的准备。 军方希望扩大目标的能力并降低运营成本。 结果,开发人员开始想到需要用涡轮喷气发动机替换冲压式喷气发动机,并从地面发射器开始过渡。
La xnumx
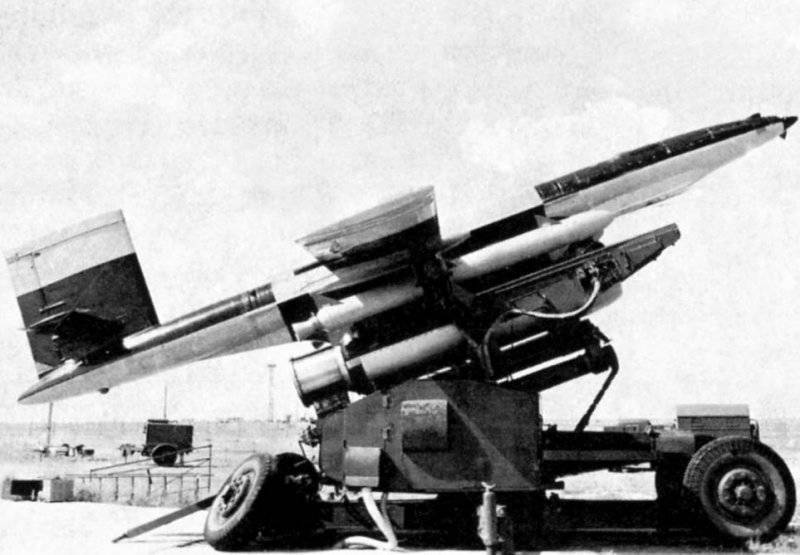
在1958中,开始生产带有RD-17BK涡轮喷气发动机9 kgf涡轮喷气发动机和地面发射的La-2600М目标。 TRD RD-9BK是从MiG-9战斗机中移除的失效引擎RD-19B的修改。 发射是在两个固体燃料助推器的帮助下进行的,一个四轮支架100-mm高射炮KS-19被用作拖曳发射器。

启动La Xnumx
在1962中,La-17再次升级。 对于所需的目标测试和作战训练过程SAM的计算,能够在飞行高度的:0,5-18公里改变反映了模拟目标的巡航导弹,战术和战略轰炸机的能力。 为此,在目标飞机上安装了海拔升高的RD-9BKR发动机,并在机身后部安装了Lüiberg镜头。 由于增加的距离EPR目标跟踪3-6地面雷达厘米范围具有增加150-180 km到400-450公里,模拟飞机的扩展类型。
为了使现代化的La-17MM可以重复使用,在发射后,着陆系统被修改。 机身后部安装一次性用品相关的电缆开口,其被拉出时,自动驾驶仪在在最低设计高度攻击角度大翻译的目标,同时停止发生发动机。 跳伞时,目标降落在滑雪板上,减震器置于TRD吊舱下。
由于RD-9的股票迅速耗尽,更换它们在70独立实体开始建立涡轮喷气发动机R-11K-300,从生活中的R-11F-300,安装在米格21,苏15转换,以及牦牛28 。 靶向R-11K-300的引擎接收到该指定的La 17K和大量生产,直到一年1992的端部。
La 17K在发射器上
尽管家庭腊17此刻的目标,当然,已经过时,无法模仿空袭的现代手段,他们直到最近一直在垃圾填埋场的控制和打靶计算的防守时使用。

在采用具有冲压式抛丸机RD-17的La-900无人目标后,出现了一个基于这种车辆的无人侦察机的问题。 关于这一主题的政府法令于6月1956发布。 但是,与目标推进喷气发动机具有小的范围内,并且该项目的实际执行仅拉17M的外观与TRD RD-推力9BK 1900公斤后违背。
AFA-BAF / 2K和AFA-BAF-21摄像机被放置在侦察机的前舱中。 自动驾驶仪被AP-63取代。 为方便运输侦察机翼机折叠。 降落伞降落在发动机舱 - 与由两个固体助推器TX-1,救援和进行的无人侦察机发射货运SATR-134底盘ZIL-98K汽车起动。 角落反射器放置在收音机透明整流罩翼尖和机身下方,拆除。
在状态测试中的1963年夏天结束,它已被证明的是,该机能够照相侦察在高达从发射台60公里,在飞行高度可达900米,在高达200公里距离的距离 - 在7000 m航速的航线上的高度。 - 680 - 885 km / h。 起始重量 - 3600 kg。
La 17P在发射器上
1963 年,作为 TBR-17 复合体(战术无人侦察机)一部分的 La-1R 正式投入使用,但部队的作战行动仅在 60 年代后半期才开始。 这是因为有必要改进地面控制和跟踪站以进行侦察 无人驾驶飞机.
据设想,TBR-1侦察机的战术无人侦察综合体可以充分移动,在发射位置具有可接受的部署时间。 该建筑群包括:牵引机动车KrAZ-255,开始安装SATR-1,运输卡车图特里-1,挂车ZIL-157或ZIL-131,特种车辆KATP-1用于发射前的检测设备侦察机,并提供启动推进发动机,以及无线电指挥和无线电定位站MRV-2M和Kama在飞行路线上控制无人侦察机。 由于无人侦察的独立中队的一部分,也有技术和业务排,配备有摄像头,移动式起重机及其他机械用特种车辆,以及师提供某一地区登陆香格里拉17R从板材料和飞机撤离提取情报。
在升级了配备P-17K-11发动机的无人侦察机La-300RM的能力之后,它已经扩展。 高海拔范围从200增加到360 km。 除了更新的相片侦察设备中的在车载设备引入的辐射检测站“西格玛”相机AFA-40,40-AFBA,AFA-20,21-FFT,ASCHFA-5M和相机“麦鸡”的形式。 苏联空军的La 17RM操作,直到中期70独立实体,在垃圾填埋场的飞机目标“设置的”无人驾驶目标之后。
一些La-17的各种修改已经交付给苏联的盟国。 在50-s中,可以在中国的测试站点满足带有冲压式喷气发动机的无人目标。 与苏联一样,它们是从Tu-4轰炸机发射的。 与苏联空军不同,活塞式轰炸机在中华人民共和国飞行直到90-s开始。 在他们的职业生涯结束时,中国的Tu-4被用作侦察无人机的载体。 在60,中国航空业推出了带有WP-17涡轮喷气发动机(RD-6的中文版)的La-9。 这架涡轮喷气发动机用于解放军空军的J-6战斗机(米格-19副本)和Q-5攻击机。 除了提供目标飞行器和批量生产在中国的技术文档中,UR-17的指定下党的无人侦察机拉1RM转移到叙利亚。 然而,他们是否在战斗情况下使用是未知的。
其中除了各种摄影器材包括电子情报站的航空电子苏联空军超音速战术侦察轰炸机米格25RB的采用,严重增加了敌人的作战后,收集信息的可能性。 如你所知,早在70-X以色列未能阻止米格25R和米格25RB的超过西奈半岛的航班。 但是,苏联专家也知道,戏剧的作用下,哪里会有远射和高空防空导弹系统,高空飞行速度不能保证侦察机的刀枪不入。 在这方面,在60-x军队结束时发起了超音速可重复使用的无人战术级侦察机的发展。 军方要求的车辆比La-17Р/РМ的使用范围更大,飞行速度更快。 此外,在无人驾驶目标的基础上创建的非常原始的设备侦察综合体不符合现代要求。 客户希望让侦察兵能够以近似巡航的速度在敌人的防守深度中行动。 结构razvedoborudovaniya有为除了固定视觉信息应输入用于辐射侦察和开口SAM位置和雷达设备的现代化的手段的装置。
在60-ies的中间,Strizh和Reis战术情报综合体的开发始于图波列夫设计局。 这项工作的结果是将已涂141战术复杂(BP-2«斯威夫特»)和战术复杂涂143(BP-3“飞行”)的创建和采用。 无人复杂的战术和作战情报BP-2«斯威夫特»在离发射点至几百公里的距离专为智能操作,而BP-3«赛» - 30-40公里。
在第一个设计阶段,设想无人侦察机将以超音速在低空突破防空线。 然而,这需要配备有加力室的发动机,这不可避免地导致燃料消耗增加。 军方还坚持认为,新一代无人侦察从战斗起飞返回时,应通过特制的滑雪板降落在自己的机场。 但计算结果表明,尽管战争中的生命持续时间非常短,但飞行速度和飞机降落以及战斗力的增加都会大大增加装置的成本。 结果,最大飞行速度受到1100 km / h限制的限制,并且决定使用降落伞救援系统降落,这反过来简化了设计并减少了飞机的起飞重量和成本。

莫尼诺博物馆内无人侦察Tu-141和Tu-143
无人侦察Tu-141和Tu-143有许多共同点,但在几何尺寸,重量,射程,组成和机载侦察设备的能力方面都有所不同。 两种装置均按照“无尾”方案制造,具有低位三角翼,沿前缘58°扫过,根部有小的重叠。 在机身前面有一个固定的梯形去稳定器,它提供了必要的稳定裕度。 PGO - 在0°到8°范围内重新排列,取决于飞机的中心位置,前缘41,3°的扫掠角度。 使用机翼和方向舵上的两件式升降机对飞机进行控制。 发动机进气口位于机身上方,靠近尾部。 这样的安排不仅使建立发射综合体变得更容易,而且还降低了无人侦察机的雷达可见度。 为了减少运输机翼控制台时的翼展,Tu-141被偏转到垂直位置。
在第一拷贝涂-141安装maloresursny P-TRD 9A-300(特别修改的修改TRD RD-9B),但之后后来建立正常生产移动以释放情报与拉曼17A牵引电动机2000千克力。 一个无人侦察与起飞重量5370公斤,在高度m 2000最大速度1110公里/小时,并有一系列的飞行1000公里。 路线上的最小飞行高度为50 m,天花板 - 6000 m。

启动Tu-141
Tu-141的发射是使用安装在机身底部的固体燃料启动加速器进行的。 在使用降落伞系统进行任务后着陆无人侦察,降落伞系统位于涡轮喷气发动机喷嘴上方机身后部的整流罩中。 关闭TRD后,产生制动降落伞,将飞行速度降低到主降落伞可以安全释放的值。 带有后跟式减震元件的三轮起落架与制动降落伞同时生产。 在接触地面之前,立即包含制动固体燃料发动机和射击降落伞。

地面设施的复杂性包括设计用于加油和准备发射的机器,拖曳发射装置,控制和测试装置以及与侦察设备一起工作的硬件。 BP-2“Strizh”综合体的所有元件都放置在移动底盘上,可以在公路上行驶。

遗憾的是,无法找到有关Strizzh侦察机构BP-2的组成和功能的确切数据。 各种来源的说,涂-141配备有先进在它的时间,导航设备,空中摄像机,红外侦察系统,装置,以确定类型和坐标工作雷达和产生辐射侦察。 在路线侦察机被控制自动驾驶仪,机动和开关智能化设备发生在一个预先设定的程序进行。
Tu-141的飞行测试始于1974年,因为侦察综合体的高度复杂性需要协调和改进机载和地面设备。 无人机的连续生产始于XKUMX年在哈尔科夫航空工厂。 在苏联解体之前,在乌克兰建造了一个1979的Tu-152副本。 在苏联西部边界部署了配备这种无人侦察机的独立侦察中队。 目前,可用的Tu-141只能在乌克兰使用。
在创建时,情报复合体BP-2“Swift”完全符合其目的。 无人侦察机具有足够广泛的能力,并有很好的机会完成任务,在演习中反复证实。 具有耗尽的飞行资源的一定数量的Tu-141被重新制作为M-141目标。 目标复合体接收到名称BP-2ВМ。
根据布局方案和技术解决方案,无人侦察Tu-143是Tu-141的一种简化版本。 Tu-143首次成功飞行于12月1970。 在1973中,一批实验无人机被安排在Kumertau的飞机工厂进行状态测试。 Tu-143的正式采用发生在1976年。

涂143
发射重量为1230 kg的无人侦察车是从轮式拖拉机BAZ-143MB的移动发射器SPU-135上发射的。 将Tu-143装入发射器并使用TZM-143运输充电机从着陆点撤离。 无人机的交付和存储在密封容器中进行。 为发射准备的侦察机构的重新安置范围高达500 km。 与此同时,综合体的技术地面设施可以沿着高速公路以-45 km / h的速度移动。

使用TZM-143运输充电机将侦察Tu-143装载到SPU-143传输和发射器上
无人机的维护是使用KPK-143控制和测试综合设施进行的,这是一套用于为卡车起重机,消防员和卡车加油的移动设备。 占据15地雷的预发射由SPU-143的战斗人员执行。 在发射之前,涡轮喷气发动机主发动机TRZ-117以最大载荷640 kgf发射,无人侦察车使用SPRD-251固体燃料加速器以与地平线15°的角度发射。 SPRD-251的安全分离由一个特殊的火焰筒提供,由启动加速器中气体的压降引发。

启动Tu-143
最初由空军命令创建的侦察机构BP-3“飞行”被广泛用于苏联武装部队,也被地面部队和海军使用。 在与武装部队的各个分支进行联合大规模演习的过程中,与载人战术侦察机MiG-21P和Yak-28P相比,Reis复合体显示出显着的优势。 Tu-143的飞行是在编程路线上使用自动控制系统进行的,该系统包括自动驾驶仪,无线电高度表和速度计。 与空军的载人战术侦察机相比,该控制系统为侦察部门提供了更准确的无人驾驶车辆通道。 侦察无人机能够以低至950 km / h的速度在低空飞行,包括在地形复杂的地区。 相对较小的尺寸为Tu-143提供了低视觉可见度和小ESR,结合高飞行数据,使无人机成为防空系统非常困难的目标。

侦察设备位于可更换的机头中,有两个主要选项:照片和电视固定路线上的图像。 此外,可以在无人机上放置辐射侦察设备和带有传单的容器。 带有Tu-3无人机的BP-143“飞行”综合体能够在白天使用照片,电视和辐射背景设备在前线进行战术空中侦察,距离前线60-70 km深度。 同时,当使用摄像机和10 H配备电视智能设备时,在2,2 H(H-飞行高度)带宽中检测到了区域和点目标。 也就是说,从1 km的高度拍摄的宽度约为10 km,电视拍摄 - 约2 km。 照相智能的拍摄间隔根据飞行高度设定。 从500 m高度以950 km / h的速度安装在侦察机头部的摄影设备使得可以从20 cm大小识别地面上的物体。海拔高度超过2000 m的山区飞越。车载电视设备通过空中传输该区域的电视图像到无人机控制站。 可以在距离UAV 5000-30的距离处接收电视图像。 辐射侦察的带宽达到40 H,所获得的信息也可以通过无线电传输到地面。 侦察设备Tu-2包括一架全景航空相机PA-143,备有1胶片m和电视设备I-120B Chibis-B和辐射侦察设备Sigma-R。 还考虑了基于Tu-429的巡航导弹的制造,但是没有关于这种改进的测试和服务采用的数据。
在降落到给定区域之前,Tu-143与发动机停止同时产生滑动,之后两级喷射降落伞系统和底盘被释放。 当地面接触时,当起落架减震器被触发时,着陆降落伞和制动引擎被点火,从而防止侦察机因降落伞的风阻而翻倒。 通过来自机载无线电信标的信号搜索无人侦察机的着陆点。 此外,取出带有侦察信息的集装箱,并将无人机交付到技术位置以备再使用。 资源Tu-143设计用于五架次。 照相材料的处理发生在接收和解密智能信息UNDER-3的移动点,之后通过通信信道在线发送接收的数据。
根据公开资料发布的信息,考虑到用于测试的原型,在从1973到1989期间,建立了超过950的Tu-143副本。 除苏联武装部队外,复杂的BP-3“飞行”还在保加利亚,叙利亚,伊拉克,罗马尼亚和捷克斯洛伐克服役。

Tu-143在捷克共和国航空博物馆的博览会上
在2009,媒体报道白俄罗斯在乌克兰购买了一批无人机。 无人侦察机被用于阿富汗的实战行动和伊朗 - 伊拉克战争期间。 在1985中,叙利亚图-143被一架以色列F-16战斗机击落黎巴嫩。 在90开始时,朝鲜在叙利亚购买了几架Tu-143。 根据西方消息来源,朝鲜同行已经开始大规模生产,并且已经在黄海韩国水域的侦察飞行中使用。 根据西方专家的说法,Tu-143的朝鲜版本也可用于交付 武器 大规模杀伤性
在90战争结束时,俄罗斯的Tu-143大规模重新装备到M-143目标中,目标是在防空部队作战训练过程中模拟巡航导弹。

准备使用乌克兰无人侦察机Tu-143
在乌克兰东南部的APU武装冲突开始时,有许多无人机Tu-141和Tu-143存放。 在冲突开始之前,他们的行动被分配到部署在敖德萨地区别列佐夫斯基区Raukhovka村的第321个独立的无人侦察机中队。

Tu-143在DPR民兵控制的地区未经许可登陆
从保护中移除的无人驾驶飞行器用于对民兵阵地的照片侦察。 在9月2014宣布休战之前,苏联建造的无人机探索的区域超过了250 000 ha。 拍摄了200对象的照片,包括48包版广告和更多150基础设施对象(桥梁,水坝,交叉路口,路段)。 然而,苏联制造的无人机的仪器设备现在已经无可救药地过时了 - 摄影胶片用于记录侦察结果,设备必须返回其领土,必须将胶片移除,送到实验室,开发和破译。 因此,实时智能是不可能的,从调查时刻到数据使用的时间跨度可能很大,这通常会使移动目标的探索结果贬值。 此外,多年前创建的30技术的技术可靠性还有很多不足之处。
在公开消息来源中,没有关于乌克兰Tu-141和Tu-143战斗任务的统计数据,但在今年夏秋2014的位置和运输过程中发布了很多无人机照片。 然而,目前,乌克兰这种类型的无人机的新图片没有公布,军方的DPR和LPR也没有通知他们的航班。 在这方面,可以假设乌克兰的Tu-141和Tu-143的库存大部分已经耗尽。
在采用BP-3 Reis情报综合体后不久,苏联部长理事会就Reis-D升级后的BP-ZD复合体的发展达成了一项决议。 原型UAV Tu-243的首次飞行发生在7月1987。 在保持机身的同时,侦察综合体经历了大幅改进。 过去,军方批评BP-3“飞行”因其实时传输情报信息的能力有限。 在这方面,除了机载摄像机PA-243之外,还在Tu-402上安装了先进的电视设备“Aist-M”。 在另一个用于夜间进行侦察的变型中,使用Zima-M热成像系统。 从电视和红外摄像机接收的图像通过无线电设备“Route-M”组织的无线电信道传输。 与空中传输并行地,飞行期间的信息被记录在机载磁介质上。 新的,更复杂的侦察设备,结合无人机的改进特性,使得该地区一次飞行中的研究区域显着增加,同时提高了所收到信息的质量。 由于在Tu-243上使用了新的导航和飞行复合体NPK-243,BP-ZD“Reis-D”的功能显着增加。 在升级过程中,地面综合体的一些元素也得到了更新,这使得提高任务效率和运行特性成为可能。

Tu-243参加MAKS-99航展
根据MAKS-99航空航天展上提供的信息,Tu-243侦察无人驾驶飞机的起飞重量为1400 kg,长度为8,28 m,翼展为2,25 m。 117 km / h。 路线上的最大飞行高度为640 m,最小值为850 m。飞行距离增加到940 km。 Tu-5000的发布和应用方法类似于Tu-50。 这架360-x末端的侦察无人机被出口。 据称,俄罗斯军队在243正式采用了Tu-143,其系列建设是在Kumertau航空生产厂的设施进行的。 然而,显然,建造的Tu-90的数量非常少。 根据军事平衡243提供的数据,有一定数量的Tu-1999无人机在服役于俄罗斯军队。 目前尚不清楚这是多少,但目前侦察综合体VR-ZD“Reis-D”已不再符合现代要求。
待续...
基于:
https://militarizm.livejournal.com/51079.html
http://zonwar.ru/news/news_110_Tu-141_Strish.html
http://www.arms-expo.ru/articles/124/81839/
http://aviation21.ru/3582-2/
http://rusvesna.su/news/1406935390
http://nevskii-bastion.ru/tu-243-maks-1999/
https://defendingrussia.ru/enc/bpla/tu143_krylataja_raketarazvedchik-1531/
http://www.arms-expo.ru/049055055056124052052048048.html
https://militarizm.livejournal.com/51079.html
https://vpk.name/library/reys-d.html
http://www.razlib.ru/transport_i_aviacija/aviacija_i_kosmonavtika_2004_01/p3.php
http://todaysmilitary.ru/2016/01/21/vnutri-tajnoj-programmy-bpla-severnoj-korei/
信息