国内无人机(部分1)
苏联制造无人机的第一项工作始于上世纪 30 年代初。 最初装有炸药,无线电控制 无人驾驶飞机 被认为是“空中鱼雷”的角色。 它们应该用于对付重要目标,这些目标被高射炮很好地掩护,有人驾驶轰炸机可能会遭受重大损失。 该主题工作的发起人是 M.N. 图哈切夫斯基。 无线电遥控飞机的开发是在 V.I. 的领导下在特别技术局(“Ostekhbyuro”)进行的。 贝考里。
在苏联测试远程无线电控制的第一架飞机是由AN设计的双引擎轰炸机TB-1。 图波列夫与自动驾驶仪WUA-2。 试验于10月在莫尼诺的1933开始。 对于Ostebbyuro飞机的远程控制,设计了Daedal遥控机械系统。 由于无线电控制飞机的起飞对于非常不完善的设备来说太难了,TB-1在飞行员的控制下起飞了。

TB-1
在实战飞行中,在起飞和飞机撤离目标后,飞行员应该已经空降。 接下来,飞机由主飞机的VHF发射器控制。 在测试时,主要问题是自动化工作不可靠,团队工作不正常,设备经常被拒绝,飞行员必须控制。 此外,军队对于在执行战斗任务期间昂贵的轰炸机无可挽回地失去这一事实并不满意。 在这方面,他们要求建立一个远程排放炸弹的系统,并规定飞机在其机场进行无线电控制着陆。
由于在30-x TB-1的中间已经过时,测试继续在四电机TB-3上进行。 提出了控制设备不稳定操作的问题,其代价是在大部分路线上以无人驾驶飞机的载人飞行为代价。 当接近目标时,飞行员没有被降落伞抛出,而是被转移到在TB-3下悬挂的I-15或I-16战斗机并在回家的路上。 接下来,根据来自控制平面的命令将TB-3定向到目标。

TB-3
但是,与TB-1的情况一样,自动化工作非常不可靠,在无线电控制TB-3的测试中,许多机电,气动和液压结构都经过了测试。 为了纠正飞机上的情况,用各种执行器替换了几个自动驾驶仪。 7月,带有WUA-1934自动驾驶仪的飞机在同年10月接受了WUA-3自动驾驶仪的测试。 测试完成后,控制设备应该用于远程操作的RD平面(“范围记录” - ANT-7--在这样一台机器上,Chkalov飞越极点飞往美国)。

飞机rd
远程机械飞机将在1937年度投入使用。 与TB-1和TB-3不同,控制平面不需要控制平面。 载有爆炸物的RD将使用信标信号以遥控模式飞行至1500 km并攻击主要敌方城市。 但是,在1937结束之前,无法将控制设备带到稳定的工作状态。 关于Tukhachevsky和Bekauri的逮捕,Ostehbyuro在1月1938被解散,用于测试的三架轰炸机被送回空军。 但是,该主题没有明确关闭,项目文件被转移到实验航空工厂编号379,一部分专家搬到那里。 11月,1938在斯大林格勒附近的草原机场,无人驾驶TB-1进行了17起飞和22着陆,这证实了遥控设备的可行性,但同时在驾驶舱内坐着飞行员准备好随时控制。
今年1月,1940颁布了劳工和国防委员会的一项法令,根据该法令,计划制造一个由无线电控制鱼雷TB-3组成的作战双人战斗机和装有SB-2和DB-3轰炸机的特殊装备的指挥机。 系统的调整非常困难,但显然,在这方面取得了一些进展。 在1942开始时,无线电控制的射弹已准备好进行战斗测试。
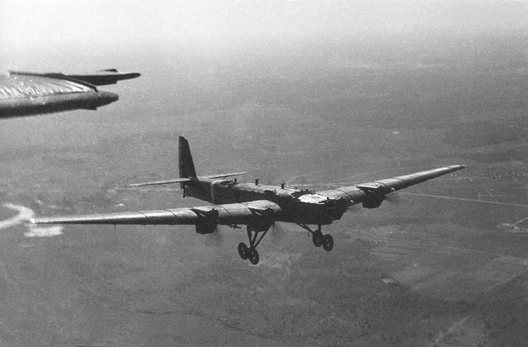
TB-3轰炸机在飞行中
第一次罢工的目标是在距离莫斯科210公里的Vyazma的一个大型铁路交叉口选择。 然而,“第一个薄饼是块状的”:在主DB-3F接近目标的过程中,控制命令无线电发射器的天线失灵,根据一些消息来源,它被一架防空导弹碎片损坏。 在那之后,装满4吨强力炸药的不受控制的TB-3掉到了地上。 第二对飞机 - 命令SB-2和驱动TB-3在轰炸机近距离爆炸后在机场燃烧,准备离场。
然而,“代达罗斯”系统并不是战前在苏联制造“空中鱼雷”的唯一尝试。 在1933,在S.F.领导下的海事研究所。 Valka开始研究遥控滑翔机,携带炸药或鱼雷。 计划远程操作车辆的创造者通过声探测器探测不可能以及拦截敌人战斗机的“空中鱼雷”的复杂性激发了他们的想法,由于其与轰炸机相比其尺寸小且滑翔机成本低而不易受到防空火力的影响。
在1934中,减少的滑翔机模型进行了飞行测试。 全尺寸样品的开发和建造委托给P.I. Oskonbyuro。 Grochowski。
计划制造几种“飞鱼雷”,用于攻击敌方海军基地和大型舰艇:
1.DT(远程规划鱼雷)没有引擎,射程为30 - 50 km;
2.LTDD(飞行远程鱼雷) - 配备喷气式或活塞式发动机,系列100 - 200 km;
3.BMP(牵引式滑翔机) - 与飞机牵引车的刚性联轴器。
在列宁格勒的第23号试验生产工厂进行了一批用于测试的实验性“计划鱼雷炸弹”的实验,并为人民国防工业委员会第10号研究所指定了制导指导系统(代号为“Kvant”)。 第一款原型机,名为PSN-1(专用滑翔机),于8月1935上映。 根据该项目,滑翔机有以下数据:起飞重量 - 1970 kg,翼展 - 8,0 m,长度 - 8,9 m,高度 - 2,02 m,最大速度 - 350 km / h,潜水速度 - 500 km / h,飞行范围 - 30 - 35 km。
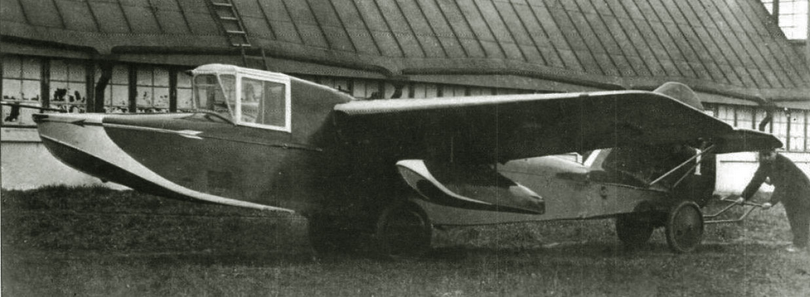
PSN-1
在第一阶段,测试了以滑翔机形式制造的载人版本。 在主要载体PSN-1的作用下提供了四引擎轰炸机TB-3。 在飞机的每个机翼下,可以悬挂一个遥控车辆。
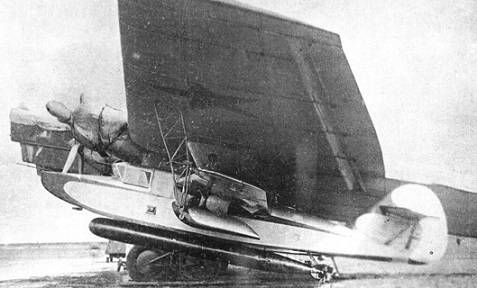
PSN-1在TB-3轰炸机的机翼下悬挂鱼雷
PSN-1的远程瞄准使用红外命令传输系统在视线内进行。 在运载机上,控制设备安装有三个红外探照灯,在滑翔机上安装了信号接收器,自动驾驶仪和执行设备。 Kvant设备的发射器放置在突出机身之外的特殊旋转框架上。 同时,由于阻力增加,航空母舰的速度降低了大约5%。
Kvant设备
据设想,即使没有远程控制,滑翔机也可用于攻击大型船只或海军基地。 在放下鱼雷或战斗冲锋后,飞行员控制下的滑翔机应该从目标移开10-12 km的距离并降落在水面上。 在那之后,机翼松开,飞机变成了一条船。 在船上发射了舷外发动机后,飞行员在海上返回了他的基地。

两架PSN-1在TB-3轰炸机的机翼下
对于战斗滑翔机的实验,在诺夫哥罗德附近的Krechevitsy选择了一个机场。 在附近的一个湖泊上,对P-6浮动平面进行了低空飞行测试的水上飞机测试。
在测试期间,确认了用炸弹坠落潜水的可能性,之后滑翔机进入水平飞行。 28 July 1936,载人PSN-1用模拟器250公斤炸弹进行了测试。 1 August 1936,滑翔机的飞行,货物550 kg。 在起飞和从航空母舰上脱开后,货物从海拔700 m的潜水中掉落。之后,滑翔机在潜入加速到320 km时再次升高,转向并降落在伊尔门湖的水面上。 2 August 1936,这次飞行是用一种惰性版炸弹FAB-1000进行的。 在与航空母舰脱开后,滑翔机以350 km / h的速度进行了俯冲轰炸。 在测试期间,结果发现,在以1 km / h的速度从载体PSN-190脱开后,能够以可承受的重量高达1000 kg进行计划。 战斗负荷的规划范围是23-27 km,具体取决于风的速度和方向。
尽管已经确认了PSN-1的飞行数据,但制导设备和自动驾驶仪的开发却被推迟了。 到30年代末,PSN-1的性能看上去不及1933年,并且客户开始对该项目失去兴趣。 1937年对23号工厂的管理人员的逮捕也起到了减缓工作步伐的作用,结果,在1937年下半年,克雷切维奇和伊尔门湖的试验基地被清算,整个积压工作被转移到列宁格勒,转为379号试验工厂。到1938年上半年379号工厂的专家们以高达138 km / h的速度进行了360次“空气鱼雷”的测试发射。 他们还练习了防空演习,转弯,调平和抛弃战斗物,以及自动降落在水上。 同时,从舰载机上起飞的悬挂系统和设备运行正常。 1938年3月,成功试飞并自动降落在水上。 但是由于当时的TB-7重型轰炸机还不能满足现代要求,而且工作的完成日期还不确定,军方要求创建一种改进的,更高速度的远程控制版本,该机应该是很有前途的TB-8重型轰炸机(Pe -3)或远程轰炸机DB-XNUMX。 为此,设计并制造了一种新的,更可靠的悬架系统,可以连接更大质量的车辆。 同时进行了广泛的测试 飞机 销毁手段:飞机鱼雷,装满液体和固体火混合物的各种燃烧弹以及重达1000公斤的FAB-1000空中炸弹模型。
在1939的夏天,开始设计一种名为PSN-2的新型遥控滑翔机。 作为战斗负荷,提供了重量为1000 kg的FAB-1000炸弹或相同质量的鱼雷。 该项目的首席设计师被任命为V.V. 尼基京。 在结构上,PSN-2滑翔机是一种双浮动单翼飞机,具有低翼和悬挂鱼雷。 与PSN-1相比,PSN-2的空气动力学形式得到了显着改善,飞行数据也有所增加。 起飞重量为1800 kg,从4000 m高度发射的滑翔机可以覆盖到50 km的距离,并在潜水速度达到600 km / h。 翼展为7,0 m,面积为9,47m²,长度为7,98 m,浮子高度为2,8 m。
为了测试,第一个原型是以载人版本进行的。 滑翔机自动控制装置位于机身舱和中间部分。 通过特殊舱口提供对设备的访问。 PSN-2测试的准备工作始于1940年的6月,同时决定组建一个培训中心,培训军队中维护和使用遥控滑翔机的专家。

PSN-2
使用喷气发动机时,PSN-2的估计最大飞行速度达到700 km / h,飞行距离为100 km。 然而,目前尚不清楚如何在这样的范围内将设备引导到目标,因为即使在视线范围内,红外控制系统也是不稳定的。
7月,1940,PSN-2的第一个副本在水上和空中进行了测试。 IBR-2水上飞机用作拖船。 然而,由于没有实现远程制导系统的令人满意的结果,并且战斗滑翔机在未来战争中的战斗价值似乎可疑,7月19 1940,根据海军委员库兹涅佐夫的命令,所有关于规划鱼雷的工作都停止了。
在1944中,“飞机”的发明者 - 一架载有战斗机的轰炸机,BC Vakhmistrov,提出了一种带有陀螺仪自动驾驶仪的无人作战滑翔机。 滑翔机是根据双梁方案制造的,可携带两枚1000-kg炸弹。 在将滑翔机送到特定区域后,飞机瞄准,解开滑翔机,然后返回基地。 在飞机脱开后,由自动驾驶仪控制的滑翔机应该朝向目标飞行,并且在预定时间过去之后进行轰炸,没有设想返回。 但是,该项目没有得到管理层的支持,也没有得到实施。
分析战前苏联的空中鱼雷项目已经达到全面测试的阶段,可以说在设计阶段出现了概念上的错误。 飞机设计师大大高估了苏联无线电电子和遥测技术的发展水平。 此外,在PSN-1 / PSN-2的情况下,选择了可回收的可重复使用滑翔机的完全不合理的设计。 一次性规划“空中鱼雷”将具有更好的重量完美,更小的尺寸和更高的飞行数据。 如果在港口设施或敌人的战舰上使用重量为1000 kg的弹头的“飞行炸弹”,制造“射弹”的所有成本将被多次补偿。
“射弹”包括在V.N.的指导下创建的战后10X和16X。 Chelomeya。 为了加快这些设备的设计工作,使用了在“飞行炸弹”Fi-103(V-1)中实施的捕获德国开发。
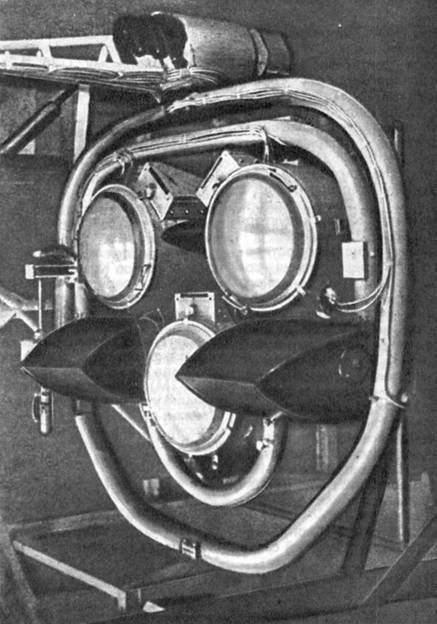
带有脉动喷气发动机10X的弹丸
射弹,或根据现代术语,10X巡航导弹将从Pe-8和Tu-2飞机或地面装置发射。 根据设计数据,最大飞行速度为600 km / h,射程为240 km,起始重量为2130 kg,弹头重量为800 kg。 PuVRD D-3-320 kgf。

使用Tu-10轰炸机启动2X
带有惯性控制系统的10X射弹可以用于大面积物体 - 就像德国的V-1一样 武器 仅对大城市有效地大规模使用。 在控制击球方面,击中一个边长为5公里的正方形被认为是一个很好的结果。 它们的优点被认为非常简单,在某些方面甚至是原始结构和使用价格合理且廉价的建筑材料。
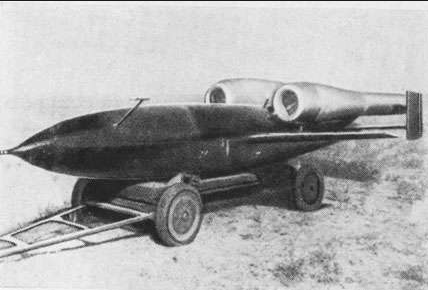
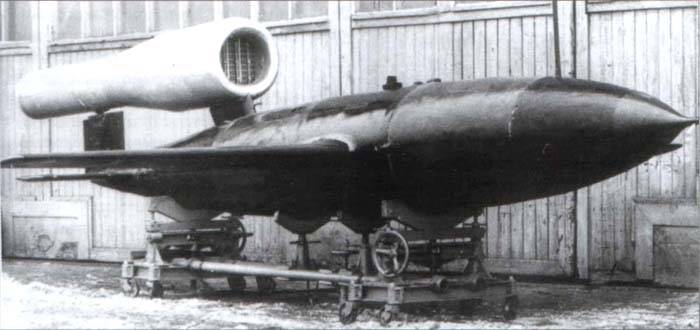
16X弹丸
此外,对于敌人城市的罢工意图更大的设备16X - 配备两个PUVRD。 在美国超级堡垒波音B-2557的基础上制造的四引擎战略轰炸机Tu-4将成为29巡航导弹的载体。 在2557 kg的重量下,具有两个FPGD D-14-4 kgNHTX的装置各自被加速至251 km / h。 发射的作战范围达到800 km。 弹头的质量 - 190公斤。

16X飞机在Tu-4轰炸机的机翼下
具有脉动喷气发动机的空中巡航导弹的开发一直持续到50-s开始。 那时,具有近声速最大飞行速度的战斗机已经投入使用,预计带有导弹的超音速拦截器将到达。 此外,在英国和美国大量使用雷达制导的中口径高射炮,炮弹装有射电保险丝。 据报道,国外正在积极开发远程和中程防空导弹系统。 在这些条件下,以600-800 km / h的速度直行并且在3000-4000 m的高度直线飞行的巡航导弹是非常容易的目标。 此外,军方对击中目标的准确性非常低以及可靠性不令人满意不满意。 尽管用污水处理厂建造了大约一百枚巡航导弹,但它们并未被接受服务,它们被用于各种实验和空中目标。 在1953中,由于开始研究更先进的巡航导弹,10X和16X的开发已经停止。
在战后时期,喷气战机开始抵达苏联空军,迅速取代了战争年代设计的活塞发动机。 在这方面,一些过时的飞机被转换成无线电控制的目标,用于测试新武器和研究目的。 因此,在50年,后来系列的五个Yak-9V被转换为Yak-9BB的无线电控制修改。 这些汽车是由双训练飞机改装而成,用于在核爆炸的云中进行取样。 Yak-9BB上的命令是从Tu-2控制平面发送的。 裂变产物的集合发生在安装在发动机罩和飞机上的特殊过滤器吊舱中。 但由于控制系统的缺陷,所有五架无线电遥控飞机在初步试验期间都被击败,并没有参加核试验。
在空军元帅E.Ya的回忆录中。 萨维茨基提到,2开始时的Pe-50无线电控制轰炸机被用于第一个苏联空对空导弹RS-1(K-5)的测试,该导弹具有无线电指令制导系统。 这些导弹位于50-x武装拦截器MiG-17PFU和Yak-25的中间。

远程Tu-4轰炸机
反过来,无线电控制的重型轰炸机Tu-4参与了第一架苏联防空导弹系统C-25“Berkut”的试验。 在Kapustin Yar试验场的B-25导弹的1953 300首次被具有飞行数据和EPR的Tu-4目标飞机击落,非常接近美国B-29和B-50远程轰炸机。 由于在苏联电子工业的50中创建了一个完全自主的,可靠运行的控制设备,结果太难以解决并转换成目标,Tu-4与驾驶舱内的飞行员起飞。 在飞机乘坐所需的梯队并放下战斗航线后,飞行员打开无线电指令开关并将车停在降落伞上。

Tu-4防空导弹失败的时间
后来,在测试新的地对空和空对空导弹时,通常的做法是使用过时或过时的战斗机转换成无线电控制目标。
第一个苏联战后特别设计的无人机,被带到大规模生产阶段,是图-123“鹰”。 自动编程的无人驾驶车辆于5月1964开始批量生产,与未采用的Tu-121巡航导弹有很多共同之处。 沃罗涅日航空工厂掌握了远程无人侦察机的系列生产。

采用固体燃料助推器的Tu-123布局
无人侦察Tu-123是一架全金属单翼飞机,有三角翼和梯形尾翼。 机翼适应超音速飞行速度,沿着67°的前缘扫过,沿着后缘有一个2°的轻微反向扫描。 永没有交配机械化和控制,并在飞行中的无人机的所有控制发生tselnopovorotnym龙骨和稳定剂,具有稳定偏离同步 - 俯仰控制和差分 - 对侧倾的控制。
低资源引擎KR-15-300最初是在S. Tumansky设计局为Tu-121巡航导弹创建的,旨在执行高空超音速飞行。 发动机推进了加力燃烧室15000 kgf,飞行中最大推力为10000 kgf。 发动机寿命 - 50小时。 开始涂123发生基于重型轮式拖拉机火箭MAZ 30V发射CT-537用于半挂车运输的负载高达50米
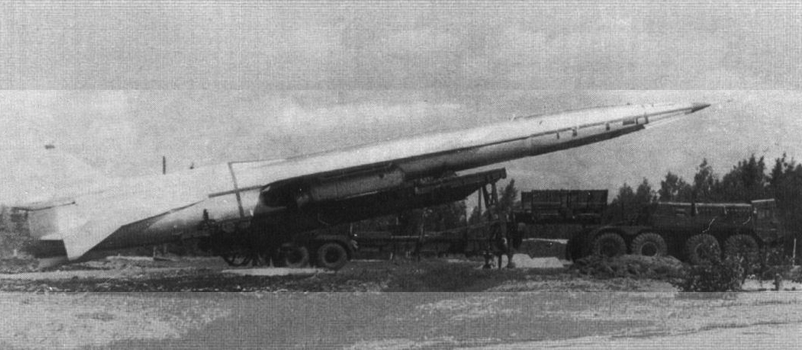
智能无人机Tu-123在移动发射器上
要启动飞机发动机KR-15 300 - 涂123两个起动发电机为其牵引车537V MAZ-安装空气发生器28伏电源。 在开始之前,涡轮喷气发动机的启动和加速发生到标称速度。 发射本身使用两个固体燃料加速器PRD-52进行,每个加速器的75000-80000 kgf与地平线的角度为+ 12°。 用完从无人机机身开始后第5秒分开燃料助推器,并在第九拍背第二亚音速进气歧管,并传递到侦察高度设置后。

模型无人侦察Tu-123“Hawk”,准备在发射器CT-30上发射
具有最大起飞重量35610 kg的无人设备具有搭乘16600公斤航空煤油,从而过滤的实际-3560 3680公里的范围内。 作为燃料生产的路径上的过滤器的高度与19 000到22 400米,这是比公知的美国侦察机洛克希德U形2的较大增加。 路线上的飞行速度 - 2300-2700 km / h。
高空和飞行速度使得Tu-123无法抵御潜在敌人的大多数防空武器。 在60-70-IES超音速侦察机飞行的高度可以攻击头部,美国超音速拦截F-4幻影II,搭载导弹“空 - 空”中程AIM-7麻雀,和英国闪电F. 3和F.6用红顶导弹。 在欧洲可用的防空系统中,只有沉重的美国MIM-14 Nike-Hercules几乎是静止的,对“鹰”构成了威胁。
Tu-123的主要目的是在距离3000 km的敌人防御深度的照片和无线电情报。 从苏联边境地区的阵地发射或部署在华沙条约国家时,老鹰队几乎可以在中欧和西欧的整个领土上进行侦察袭击。 在拥有Tu-123的空军部队的演习中,无人驾驶综合体的工作在多边形条件下的多次发射中反复测试。
车载设备“Yastreb”的组成引入了一个真正的“照相馆”,它允许您在航线上拍摄大量照片。 相机隔间配备了带有耐热玻璃和空调和吹风系统的窗户,这对于防止在窗格和相机镜头之间的空间中形成“雾霾”是必要的。 鼻容器容纳透视航空照相机AFA-41 / 20M 3计划航空照相机AFA-54 / 100M光电SU3光米和SE-站电子情报CDS-6RD“钻石4A”到装置的数据记录。 照相涂-123允许拍摄带宽地形60千米,2 700公里的长度,比例1公里:. 1厘米以及在40公里带宽,并使用比例1米的400 200公里长度:1厘米根据预先编程的程序打开和关闭飞机上的相机。 通过寻找雷达辐射源的位置和敌方雷达特征的磁记录来进行放射技术侦察,从而确定敌方部署的无线电设备的位置和类型。

智能舱的布局
为了便于维护和准备战斗使用,弓形容器在技术上脱离到三个隔间中,而不会断开电缆。 带有侦察设备的集装箱通过四个气动锁固定在机身上。 鼻舱的运输和储存在特殊的封闭式汽车半挂车中进行。 在准备发射时,使用油轮,带发电机的CTA-30预发射准备机,电压转换器和压缩空气压缩机,以及KCM-123控制和起动机器。 重轮拖拉机MAZ 537V可以在距离11450公里的速度在高速公路直到500公里/小时上被运送无人侦察干重45公斤。

远程无人侦察系统使得有可能收集位于敌人防御深处的物体的信息,并确定中程作战战术弹道和巡航导弹的位置。 对机场,海军基地和港口,工业设施,船舶连接,敌方防空系统进行侦察,并评估使用大规模杀伤性武器的结果。

在完成任务后,当返回他的领土时,无人侦察机由驾驶信号灯的信号引导。 进入着陆区时,设备在地面控制的控制下通过。 在地面指挥下,爬上去,煤油残渣从油箱中排出,涡轮喷气发动机关闭。
在制动降落伞释放后,带有侦察设备的舱室与车辆分离,并在救援降落伞上下降到地面。 为了减轻对地球表面的影响,生产了四个减震器。 为方便搜索其上的乐器室,在着陆后,无线电信标自动开始工作。 中央和尾部以及在降落伞下降时由于撞击地面而坍塌并且不适合进一步使用。 维修后带有侦察设备的仪表舱可安装在另一台无人机上。
尽管Tu-123的良好飞行特性几乎是一次性的,但是具有足够大的起飞重量和显着的成本限制了其大规模使用。 总共制造了52侦察综合体,并将它们交付给部队直到1972年。 侦察员Tu-123一直服役到1979年,之后其中一些人被用于防空部队的作战训练过程中。 涂-123的拒绝在很大程度上被与采用载人超音速侦察机米格25R / RB,这在早期70-X被证明是侦察飞越西奈半岛期间有效相关联。
待续...
基于:
http://diletant.media/articles/25704406/
http://www.chaskor.ru/article/rosijskie_bespilotniki_istoriya_padeniya_15266
http://www.tinlib.ru/transport_i_aviacija/tehnika_i_vooruzhenie_1993_02/p9.php
http://www.airwar.ru/enc/glider/psn2.html
http://www.airwar.ru/weapon/ab/10x.html
http://www.airwar.ru/enc/spy/tu123.html
http://www.krasfun.ru/2015/10/sistema-dalnej-bespilotnoj-razvedki-tu-123-dbr-1-yastreb-sssr/
信息