无人反潜艇ACTUV(美国)
就在几天前,DARPA机构和美国国防工业的一些组织完成了无人反潜复合体ACTUV测试的第一阶段。 唯一的原型被转移到另一个结构的管辖区,现在必须进行新的检查,然后将其转移到海军部队的一个部门的管辖范围内。 预计到今年年底ACTUV将补充美国海军。
1月下旬,高级发展机构DARPA报告了在有前景的ACTUV项目框架内成功解决其任务的问题。 它对未来的无人反潜艇进行了所有预定的检查,现在准备将其交给另一个组织。 美国海军研究部将对新技术进行进一步的研究。 根据其活动的结果,该综合体可以投入使用。

船只ACTUV代表艺术家DARPA
最新 新闻 表明一般情况下,带有特殊搜索设备的无人驾驶船的原始草案符合对它的期望。 因此,在可预见的未来,美国海军将能够获得与拟议概念相对应的大量新技术。 ACTUV型舰艇可以是美国海军中最大的舰艇之一。
ACTUV项目(ASW Continuous Trail无人驾驶船 - “长期试验无人反潜船”)是在DARPA机构的倡议下在2010推出的。 在分析了目前的情况后,该组织的专家发现了对海上安全的主要威胁,并制定了打击海上安全的方法。 美国专家认为第三国的柴电潜艇是一个严峻的挑战。 这种具有低成本的技术可以大量建造。 柴油船的低噪音使其难以检测到。

另一个版本的船的外观,更接近现实
大量低噪声船的存在对美国的反潜艇群提出了特殊要求 舰队 就检测工具的数量和质量而言。 在过去十年的末期,出现了一个令人好奇的建议,它使我们能够解决现有问题。 有人提议在大量携带一整套搜索设备的小型轻型无人船的帮助下,对可能的敌方DEPL活动进行巡逻。
为了测试新的想法,建议开发和建造一艘完全符合要求的船舶。 然后有必要进行长期的综合测试。 该项目的技术要求在2010年度形成。 该项目得到了名称,充分揭示了计划工作的本质。 它反映了没有船的新船员的战术作用,以及长期测试的目的。 全尺寸原型机获得了自己的名字Sea Hunter(“Sea Hunter”)。
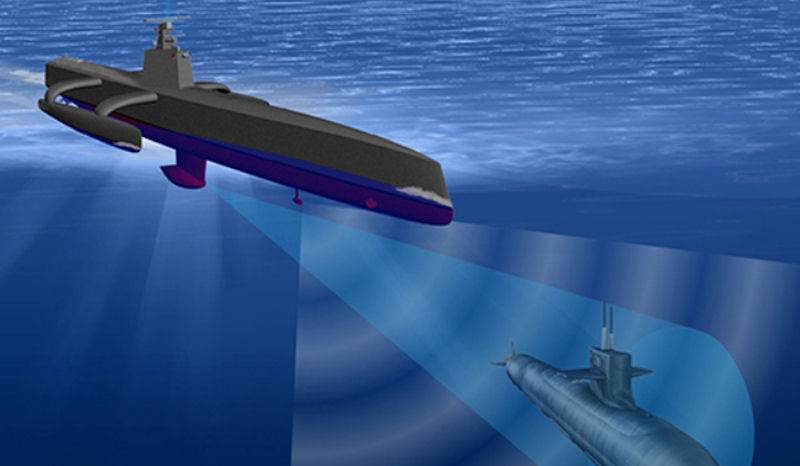
船舶ACTUV的运作原理
在前两年,几家美国公司参与了未来船舶ACTUV技术形象的开发。 在11月2012,DARPA组织选择了最成功的提案的作者,该提案计划在可预见的未来实施。 承包商是Leidos公司,该公司在所有必要领域都有一些经验。 她签约开发技术项目并建立原型。 为了执行这些工程,承包商的权利为59百万美元。
未来的船ACTUV的设计花了大约一年半的时间。 在2014中,结构的建造始于其中一个造船厂。 根据计划,不迟于同年秋天,应该推出原型。 全部测试应该只在2016年开始。 奇怪的是,在该计划的框架内,还建造了一艘实验船。 它与完全成熟的ACTUV在简化设计上有所不同,但同时它还带有一套几乎完整的无线电子和水声系统。
在2014的秋天,以Pathfinder为名的13-meter试验船的测试开始了。 在几个月内,对沿线的自主交通进行了各种检查。 在2015的1月份,它成功通过了35海里长度(大约60 km)的河道,仅使用预先编程的数据和来自机载导航和监视辅助设备的数据。 不需要人为干预,船成功抵达目的地。 这样的检查使得甚至可以在其建造结束之前确定Sea Hunter设备的真实能力。

海洋猎人船在发射之前,1月2016
根据职权范围,ACTUV应携带各种旨在搜索潜艇的监视和探测工具。 与排除机组人员相关的其他要求允许在相对紧凑的机构中容纳所有必需的设备。 因此,具有所有功能的成品船不具有大尺寸的特征。 其总长度约等于40 m,位移不超过140 t。
该项目涉及使用高度加长的小宽度船体,背部略微浸透。 在船的前部,两侧平滑地发散一小段距离,之后船体的宽度不会改变。 由于这种船体的适航性有限,必须使用额外的支腿船体。 它们位于船尾并且用一对横梁固定在预定位置。 在船甲板上的第一个梁之前,有一个小舱,有测试器和装置用于安装各种设备。 为了降低船体在船体设计中的可见度,上部结构和支腿广泛使用碳纤维和复合材料。
在ACTUV的主船体内部放置了两台柴油发动机,作为其发电厂的基础。 发动机负责车载发电机的运行,以及驱动一对螺旋桨。 在这种推进装置的帮助下,该船能够达到27节点的速度。 12结的经济速度提供了高达10千海里的续航里程。 因此,船的自主权达到了60-90天。

使用起重机进行下降。 您可以考虑机箱和螺钉的配置。
大多数时候,无人驾驶的船应由其自己的自动控制系统控制。 中央车载计算机能够从所有可用的观察手段中收集各种数据,分析它们,并在必要时采取行动。 因此,对于导航,该船载有用于接收来自GPS卫星,具有不同特性的若干雷达站以及全天立体光电系统的信号的设备。 在所有这些设备的帮助下,自动化可以监控水域,找到其他表面物体或海岸并防止与它们发生碰撞。
为了测试船,收到了船员的简易舱。 它安装在标准上层建筑的前面,配备了监控它的所有必要仪器,它应配备一个驾驶室,并且只能通过自动化或遥控器进行控制。
最初,ACTUV项目涉及使用目标设备的模块化架构。 根据任务,建议为船配备一个或另一个可快速拆卸的设备。 在大多数配置中,他必须携带相同的设备。 首先考虑海上猎人作为反潜舰,因此必须携带适当的设备。 因此,它配备了带有模块化可扩展声纳系统声纳站(“模块化可扩展声纳系统”)或MS3天线的钩形天线罩。 这种附加站位于船体内。 还建议使用磁力计来探测潜艇。

在水的原型小船
机载设备中最有趣的元素是TALONS系统(拖曳空中电梯的海军系统 - “用于海洋系统的拖曳空中升降机”)。 它包括一个带绞盘的基座单元,放置在托架的上部结构上,以及一个带有柔软降落伞翼的轻型飞机,建议将其悬挂在一个或另一个装置上。 当船在运动时,机翼应该向迎面而来的气流充气,结果它将悬浮的仪器升到空中。 对于这种船,这种滑翔机用从受控绞盘发出的电缆牵引。 将雷达天线或光学设备升高到海平面以上60 m的高度,可以显着增加最大观测范围。
在自主船上有一套开发的通信设备,可以与基地和反潜防御的其他元素进行数据交换。 ACTUV船能够从巡逻机和水面舰艇接收数据。 另外,他可以给他们提供信息。 可以与基座通信,包括为了从操作员的控制台直接控制容器。
在开发一个新概念时,随后建立了ACTUV船,DARPA专家得出结论认为不需要机载武器。 无人乘船只能成为搜索设备的载体,这不会对其性能产生不利影响。 在这种情况下,破坏检测到的潜艇的任务分配给携带所需武器的船只和飞机。

另一边的看法
根据这一概念的作者概念,海上猎人船或其未来的姐妹船将长期在某一地区巡逻,以搜寻敌方潜艇。 根据具体情况,该船将能够使用机载声纳系统独立地找到潜艇或开始搜索,并在其预定位置接收数据。 在找到潜艇之后,该船的自动装置将能够分析噪声和磁场以确定目标的类型。 在伴随检测到的物体的同时,ACTUV船只必须将实际信息传递给不同的消费者,首先是反潜武器的载体。
ACTUV船的主要目标是寻找潜艇。 同时,MS3水声复合体的特性确保了其他作品的性能。 在其中一种模式中,该系统能够发现小型水下物体,例如海底。 因此,在不更换机载设备的情况下,即使潜力非常有限,该船也可以是潜艇猎人和扫雷舰。
目前,美国海军潜艇的搜索和销毁被分配给Arleigh Burke类型的驱逐舰。 在ACTUV项目启动时,这种船的日常运营活动成本约为700千美元。 无人驾驶的“海上猎人”当天的工作成本不应超过15-20数千。 因此,就工作成本而言,一艘驱逐舰相当于35自主船只。 正确组织反潜防御各种要素的相互作用和作战工作将最大限度地利用计算出的节约。

建立的上层建筑由简单的机组人员补充
由于几个原因,ACTUV型码头的建造被推迟了几个月。 该船于1月2016仅在Vigor Shipyards工厂(俄勒冈州波特兰市)启动。 在月底,测试开始,在他们首先检查发电厂和船舶的驾驶特性的框架内。 根据现有数据,已经在第一次检查的框架内,海上猎人船首次能够探测到模仿敌方潜艇的水下物体。 MS3产品确定其存在距离约1 km。
同年4月,无人驾驶船只被派往圣地亚哥,由企业开发商和DARPA机构进行检查。 随后,海军部队的测试应负责测试。 根据当时的计划,所有测试都给了两年时间。 9月,2018计划决定现有船只和整个计划的未来。
从4月到6月,海上猎人的2016正在进行海上试验,在此期间它展示了其在不同水域和不同条件下的特征。 计算出的参数得到确认。 此外,当他达到4分时,这艘船显示出他有信心漂浮在水面上的能力。 根据一些报道,在经过这些测试后,船经过了细微的改进,然后返回海上垃圾填埋场。 现在他不仅要使用发电厂和控制系统,还要使用检测目标的方法。
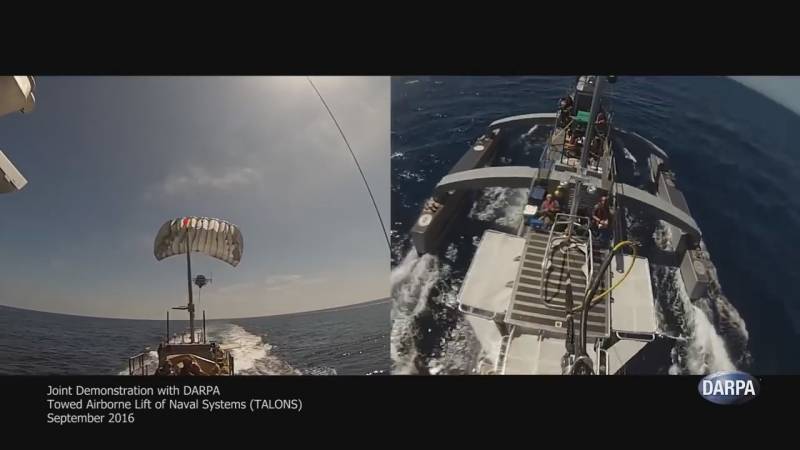
TALONS系统测试。 在左边 - 从船的船上摄像机的框架,在右边 - 从拖曳的机翼
在2016的夏天,新的测试开始了,在此期间,自主船与潜艇的模拟器进行了交互,并展示了它们搜索它们的能力。 获得了可接受的结果,但在某些情况下,有必要改进可用的设备。 但是,没有具体说明这些过程的技术细节。
同年10月,ACTUV船首次在实践中测试了TALONS系统。 在不同条件下和在载体容器的不同类型的运动下,在软翼上提升和降低设备。 该测试在两个剧集中达到高潮,在此期间滑翔机升高到1000英尺(约300 m)的高度并在空中保持一个半小时。 该船同时进行了各种战斗工作的特点。
根据最近的报道,整个2017年度都向Leidos和DARPA进行了新的测试,用于测试唯一使用反潜设备的无人驾驶船。 这些工作在高级开发署的监督下进行,仅在几天前结束。 1月底,该船被海军研究部接管。 据报道,现在他将再次参加测试,在此期间将制定战斗使用技术的问题。

ACTUV船全速行驶; TALONS举起相机
根据批准的时间表,海军部队监督下的新试验阶段应在不迟于当年秋季完成。 ACTUV船的主要特征和能力已经建立,现在军方必须决定其在船队使用方面的前景问题。 如果作为测试结果,该项目将得到积极的评估,那么在可预见的将来,可能会发布新的无人船的系列建造订单。 同时,我们不能排除订购类似用途的新项目的可能性。
据报道,虽然五角大楼倾向于乐观地评估ACTUV项目。 在测试期间,这种类型的现有船只表现良好,并确认了计算的特征。 从技术的角度来看,他真的能够执行所有分配的功能。 与此同时,虽然在现有的反潜防御结构中纳入新技术存在一些问题。
增加无船艇的船只,潜艇和飞机可能与某些组织或技术问题有关。 显然,剩下的测试应该准确地解决这些问题。 收到积极成果后,项目的未来命运将会很明确。 海军将订购新装备并开始准备将其纳入现有的反潜防御系统。

船“海猎人”进行循环
由于显而易见的原因,美国海军的指挥部尚未具体说明将来如何部署未来的自主反潜艇以及需要多少这样的设备才能获得理想的结果。 虽然某些假设和结论仅在财务方面的背景下作出。 ACTUV型船比任何驱逐舰或反潜飞机便宜几倍甚至十倍,此外,运营成本也存在巨大差异。
因此,五角大楼有一种奇怪的方式,通过相当温和的支出获得所需的机会。 但是,迄今为止尚未报告部署新技术的真正计划。 如果这些信息将被公布,那么直到明年秋天海军司令部必须做出最终决定时才会公布。
几年前,DAPRA机构提出了一种新的方法来改进现有的反潜防御,而牺牲了带有搜索和探测设备的有前途的自动无人船。 近年来的开发工作表明,可用的技术允许您创建具有所有所需功能的这种技术。 反过来,原型试验证明了船只能够解决任务。 时间将证明ACTUV复合体是否能够引起军队兴趣并成为舰队的全面部分。 关于当前项目的最终决定将不早于秋季。
在网站的材料上:
http://darpa.mil/
http://naval-technology.com/
http://navaldrones.com/
https://news.usni.org/
https://globalsecurity.org/
https://breakingdefense.com/
1月下旬,高级发展机构DARPA报告了在有前景的ACTUV项目框架内成功解决其任务的问题。 它对未来的无人反潜艇进行了所有预定的检查,现在准备将其交给另一个组织。 美国海军研究部将对新技术进行进一步的研究。 根据其活动的结果,该综合体可以投入使用。
船只ACTUV代表艺术家DARPA
最新 新闻 表明一般情况下,带有特殊搜索设备的无人驾驶船的原始草案符合对它的期望。 因此,在可预见的未来,美国海军将能够获得与拟议概念相对应的大量新技术。 ACTUV型舰艇可以是美国海军中最大的舰艇之一。
ACTUV项目(ASW Continuous Trail无人驾驶船 - “长期试验无人反潜船”)是在DARPA机构的倡议下在2010推出的。 在分析了目前的情况后,该组织的专家发现了对海上安全的主要威胁,并制定了打击海上安全的方法。 美国专家认为第三国的柴电潜艇是一个严峻的挑战。 这种具有低成本的技术可以大量建造。 柴油船的低噪音使其难以检测到。
另一个版本的船的外观,更接近现实
大量低噪声船的存在对美国的反潜艇群提出了特殊要求 舰队 就检测工具的数量和质量而言。 在过去十年的末期,出现了一个令人好奇的建议,它使我们能够解决现有问题。 有人提议在大量携带一整套搜索设备的小型轻型无人船的帮助下,对可能的敌方DEPL活动进行巡逻。
为了测试新的想法,建议开发和建造一艘完全符合要求的船舶。 然后有必要进行长期的综合测试。 该项目的技术要求在2010年度形成。 该项目得到了名称,充分揭示了计划工作的本质。 它反映了没有船的新船员的战术作用,以及长期测试的目的。 全尺寸原型机获得了自己的名字Sea Hunter(“Sea Hunter”)。
船舶ACTUV的运作原理
在前两年,几家美国公司参与了未来船舶ACTUV技术形象的开发。 在11月2012,DARPA组织选择了最成功的提案的作者,该提案计划在可预见的未来实施。 承包商是Leidos公司,该公司在所有必要领域都有一些经验。 她签约开发技术项目并建立原型。 为了执行这些工程,承包商的权利为59百万美元。
未来的船ACTUV的设计花了大约一年半的时间。 在2014中,结构的建造始于其中一个造船厂。 根据计划,不迟于同年秋天,应该推出原型。 全部测试应该只在2016年开始。 奇怪的是,在该计划的框架内,还建造了一艘实验船。 它与完全成熟的ACTUV在简化设计上有所不同,但同时它还带有一套几乎完整的无线电子和水声系统。
在2014的秋天,以Pathfinder为名的13-meter试验船的测试开始了。 在几个月内,对沿线的自主交通进行了各种检查。 在2015的1月份,它成功通过了35海里长度(大约60 km)的河道,仅使用预先编程的数据和来自机载导航和监视辅助设备的数据。 不需要人为干预,船成功抵达目的地。 这样的检查使得甚至可以在其建造结束之前确定Sea Hunter设备的真实能力。

海洋猎人船在发射之前,1月2016
根据职权范围,ACTUV应携带各种旨在搜索潜艇的监视和探测工具。 与排除机组人员相关的其他要求允许在相对紧凑的机构中容纳所有必需的设备。 因此,具有所有功能的成品船不具有大尺寸的特征。 其总长度约等于40 m,位移不超过140 t。
该项目涉及使用高度加长的小宽度船体,背部略微浸透。 在船的前部,两侧平滑地发散一小段距离,之后船体的宽度不会改变。 由于这种船体的适航性有限,必须使用额外的支腿船体。 它们位于船尾并且用一对横梁固定在预定位置。 在船甲板上的第一个梁之前,有一个小舱,有测试器和装置用于安装各种设备。 为了降低船体在船体设计中的可见度,上部结构和支腿广泛使用碳纤维和复合材料。
在ACTUV的主船体内部放置了两台柴油发动机,作为其发电厂的基础。 发动机负责车载发电机的运行,以及驱动一对螺旋桨。 在这种推进装置的帮助下,该船能够达到27节点的速度。 12结的经济速度提供了高达10千海里的续航里程。 因此,船的自主权达到了60-90天。

使用起重机进行下降。 您可以考虑机箱和螺钉的配置。
大多数时候,无人驾驶的船应由其自己的自动控制系统控制。 中央车载计算机能够从所有可用的观察手段中收集各种数据,分析它们,并在必要时采取行动。 因此,对于导航,该船载有用于接收来自GPS卫星,具有不同特性的若干雷达站以及全天立体光电系统的信号的设备。 在所有这些设备的帮助下,自动化可以监控水域,找到其他表面物体或海岸并防止与它们发生碰撞。
为了测试船,收到了船员的简易舱。 它安装在标准上层建筑的前面,配备了监控它的所有必要仪器,它应配备一个驾驶室,并且只能通过自动化或遥控器进行控制。
最初,ACTUV项目涉及使用目标设备的模块化架构。 根据任务,建议为船配备一个或另一个可快速拆卸的设备。 在大多数配置中,他必须携带相同的设备。 首先考虑海上猎人作为反潜舰,因此必须携带适当的设备。 因此,它配备了带有模块化可扩展声纳系统声纳站(“模块化可扩展声纳系统”)或MS3天线的钩形天线罩。 这种附加站位于船体内。 还建议使用磁力计来探测潜艇。

在水的原型小船
机载设备中最有趣的元素是TALONS系统(拖曳空中电梯的海军系统 - “用于海洋系统的拖曳空中升降机”)。 它包括一个带绞盘的基座单元,放置在托架的上部结构上,以及一个带有柔软降落伞翼的轻型飞机,建议将其悬挂在一个或另一个装置上。 当船在运动时,机翼应该向迎面而来的气流充气,结果它将悬浮的仪器升到空中。 对于这种船,这种滑翔机用从受控绞盘发出的电缆牵引。 将雷达天线或光学设备升高到海平面以上60 m的高度,可以显着增加最大观测范围。
在自主船上有一套开发的通信设备,可以与基地和反潜防御的其他元素进行数据交换。 ACTUV船能够从巡逻机和水面舰艇接收数据。 另外,他可以给他们提供信息。 可以与基座通信,包括为了从操作员的控制台直接控制容器。
在开发一个新概念时,随后建立了ACTUV船,DARPA专家得出结论认为不需要机载武器。 无人乘船只能成为搜索设备的载体,这不会对其性能产生不利影响。 在这种情况下,破坏检测到的潜艇的任务分配给携带所需武器的船只和飞机。

另一边的看法
根据这一概念的作者概念,海上猎人船或其未来的姐妹船将长期在某一地区巡逻,以搜寻敌方潜艇。 根据具体情况,该船将能够使用机载声纳系统独立地找到潜艇或开始搜索,并在其预定位置接收数据。 在找到潜艇之后,该船的自动装置将能够分析噪声和磁场以确定目标的类型。 在伴随检测到的物体的同时,ACTUV船只必须将实际信息传递给不同的消费者,首先是反潜武器的载体。
ACTUV船的主要目标是寻找潜艇。 同时,MS3水声复合体的特性确保了其他作品的性能。 在其中一种模式中,该系统能够发现小型水下物体,例如海底。 因此,在不更换机载设备的情况下,即使潜力非常有限,该船也可以是潜艇猎人和扫雷舰。
目前,美国海军潜艇的搜索和销毁被分配给Arleigh Burke类型的驱逐舰。 在ACTUV项目启动时,这种船的日常运营活动成本约为700千美元。 无人驾驶的“海上猎人”当天的工作成本不应超过15-20数千。 因此,就工作成本而言,一艘驱逐舰相当于35自主船只。 正确组织反潜防御各种要素的相互作用和作战工作将最大限度地利用计算出的节约。

建立的上层建筑由简单的机组人员补充
由于几个原因,ACTUV型码头的建造被推迟了几个月。 该船于1月2016仅在Vigor Shipyards工厂(俄勒冈州波特兰市)启动。 在月底,测试开始,在他们首先检查发电厂和船舶的驾驶特性的框架内。 根据现有数据,已经在第一次检查的框架内,海上猎人船首次能够探测到模仿敌方潜艇的水下物体。 MS3产品确定其存在距离约1 km。
同年4月,无人驾驶船只被派往圣地亚哥,由企业开发商和DARPA机构进行检查。 随后,海军部队的测试应负责测试。 根据当时的计划,所有测试都给了两年时间。 9月,2018计划决定现有船只和整个计划的未来。
从4月到6月,海上猎人的2016正在进行海上试验,在此期间它展示了其在不同水域和不同条件下的特征。 计算出的参数得到确认。 此外,当他达到4分时,这艘船显示出他有信心漂浮在水面上的能力。 根据一些报道,在经过这些测试后,船经过了细微的改进,然后返回海上垃圾填埋场。 现在他不仅要使用发电厂和控制系统,还要使用检测目标的方法。

TALONS系统测试。 在左边 - 从船的船上摄像机的框架,在右边 - 从拖曳的机翼
在2016的夏天,新的测试开始了,在此期间,自主船与潜艇的模拟器进行了交互,并展示了它们搜索它们的能力。 获得了可接受的结果,但在某些情况下,有必要改进可用的设备。 但是,没有具体说明这些过程的技术细节。
同年10月,ACTUV船首次在实践中测试了TALONS系统。 在不同条件下和在载体容器的不同类型的运动下,在软翼上提升和降低设备。 该测试在两个剧集中达到高潮,在此期间滑翔机升高到1000英尺(约300 m)的高度并在空中保持一个半小时。 该船同时进行了各种战斗工作的特点。
根据最近的报道,整个2017年度都向Leidos和DARPA进行了新的测试,用于测试唯一使用反潜设备的无人驾驶船。 这些工作在高级开发署的监督下进行,仅在几天前结束。 1月底,该船被海军研究部接管。 据报道,现在他将再次参加测试,在此期间将制定战斗使用技术的问题。

ACTUV船全速行驶; TALONS举起相机
根据批准的时间表,海军部队监督下的新试验阶段应在不迟于当年秋季完成。 ACTUV船的主要特征和能力已经建立,现在军方必须决定其在船队使用方面的前景问题。 如果作为测试结果,该项目将得到积极的评估,那么在可预见的将来,可能会发布新的无人船的系列建造订单。 同时,我们不能排除订购类似用途的新项目的可能性。
据报道,虽然五角大楼倾向于乐观地评估ACTUV项目。 在测试期间,这种类型的现有船只表现良好,并确认了计算的特征。 从技术的角度来看,他真的能够执行所有分配的功能。 与此同时,虽然在现有的反潜防御结构中纳入新技术存在一些问题。
增加无船艇的船只,潜艇和飞机可能与某些组织或技术问题有关。 显然,剩下的测试应该准确地解决这些问题。 收到积极成果后,项目的未来命运将会很明确。 海军将订购新装备并开始准备将其纳入现有的反潜防御系统。

船“海猎人”进行循环
由于显而易见的原因,美国海军的指挥部尚未具体说明将来如何部署未来的自主反潜艇以及需要多少这样的设备才能获得理想的结果。 虽然某些假设和结论仅在财务方面的背景下作出。 ACTUV型船比任何驱逐舰或反潜飞机便宜几倍甚至十倍,此外,运营成本也存在巨大差异。
因此,五角大楼有一种奇怪的方式,通过相当温和的支出获得所需的机会。 但是,迄今为止尚未报告部署新技术的真正计划。 如果这些信息将被公布,那么直到明年秋天海军司令部必须做出最终决定时才会公布。
几年前,DAPRA机构提出了一种新的方法来改进现有的反潜防御,而牺牲了带有搜索和探测设备的有前途的自动无人船。 近年来的开发工作表明,可用的技术允许您创建具有所有所需功能的这种技术。 反过来,原型试验证明了船只能够解决任务。 时间将证明ACTUV复合体是否能够引起军队兴趣并成为舰队的全面部分。 关于当前项目的最终决定将不早于秋季。
在网站的材料上:
http://darpa.mil/
http://naval-technology.com/
http://navaldrones.com/
https://news.usni.org/
https://globalsecurity.org/
https://breakingdefense.com/
信息