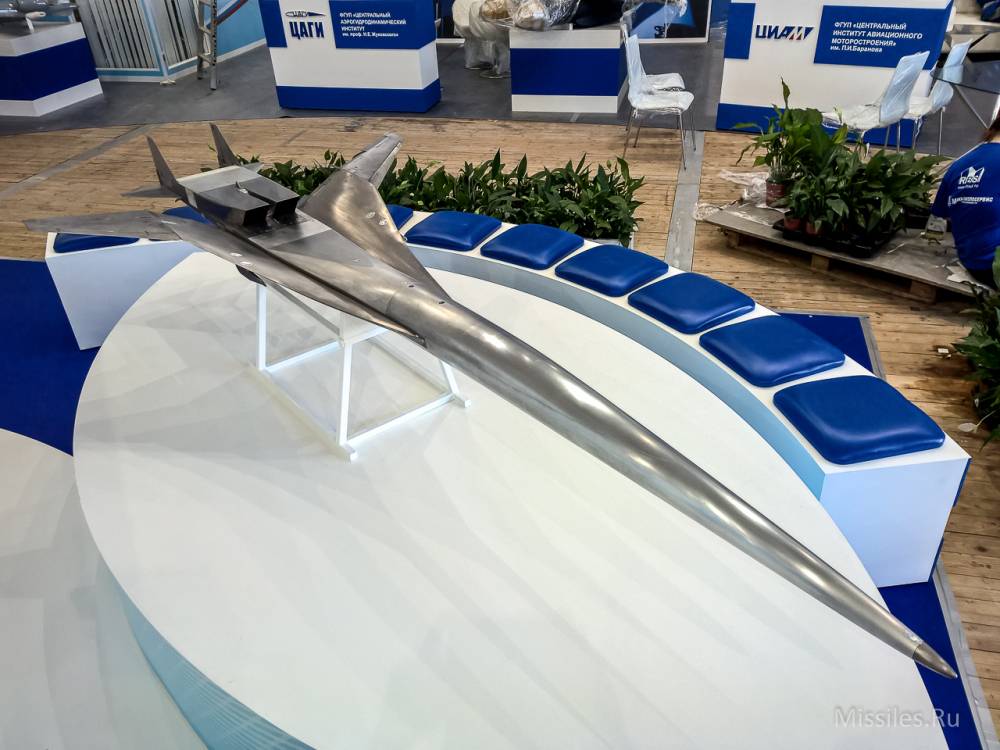
多模高超音速无人机“锤”

目前,NPO Molniya就研究和开发工作的主题Molot正在开发一种多模高超音速无人机。 该无人机被认为是高超音速无人驾驶螺旋桨技术的原型演示器,其具有组合式屏幕涡轮冲压发动机动力装置。 该原型的关键技术是使用具有亚音速燃烧室和筛网进气装置的冲压式喷气发动机(冲压式喷气发动机)。
原型演示器的计算和实验参数:
马赫巡航编号M = 1.8 ... 4
- 飞行高度从小到Н= 20 000 m,
- 飞行重量高达530 kg。
- 使用固体燃料加速器启动发射器。

该SRW的历史是由NPO Molniya开发的多模式超音速无人机(MSBLA)项目,该项目确定了有前途的无人驾驶或有人驾驶加速器的空气动力学形状。 MSBLA的关键技术是使用带有亚音速燃烧室和屏幕进气装置的冲压式喷气发动机(冲压式喷气发动机)。 MSBLA设计参数:马赫巡航数M = 1.8 ... 4,飞行高度从低到H≈20000 m,起始重量高达1000 kg。
在SVS-2的TsAGI展台调查的进气口布局显示,与机身(图A)“同时”制造的应用腹侧楔形屏幕的效率低,并且矩形屏幕的跨度等于机身的宽度(图B)。

它们都提供了用于恢复总压力ν和攻角的流速f而不是增加它们的系数的近似恒定性。
由于X-90火箭上使用的正面屏幕不适合MSBLA作为加速平面的原型,因此在早期80-s的TsAGI实验研究的基础上决定开发腹侧屏幕,保留配置的两级中心体由测试结果。
在TsAGI特别CBC-2试验台,12月2008 - 2月2009和3月2010的两个阶段的实验研究期间,进行了数字搜索研究的中间阶段,开发了具有不同计算数字的两级锥形体的屏幕进气装置(EVF)。马赫步骤,使我们能够在很宽的马赫数范围内获得可接受的推力。

筛网的作用在于,在马赫数M> 2.5时,流速和回收系数的增加以及迎角的增加。 这两个特性的正梯度的大小随马赫数的增加而增加。

EVZU最初开发并应用于由Raduga开发的X-90高超声速实验飞机(巡航导弹,根据北约分类AS-19考拉)

因此,原型的空气动力学配置是根据作者所称的“混合”方案开发的,将ESU集成到载体系统中。
混合方案具有“鸭子”方案(通过支承表面的数量和位置)和无尾方案(通过纵向控制器官的类型)的特征。 典型的MSBLA轨迹包括从地面发射器发射,通过固体燃料加速器加速到超音速冲压发动机发射速度,根据具有水平段的预定程序的飞行,以及在降落伞上软着陆的制动到低亚音速速度。
可以看出,当α= 1.2°... 1.4°时,由于较大的屏幕效应和最小阻力下的空气动力学布局的优化,混合布局在很宽的高度范围内实现了显着更高的最大飞行马赫数M≈4.3H = 11 ... 21 km。 “鸭子”和“无尾”方案在高度H = 3.72 km处达到数量M = 3.74 ... 11的最大值。 同时,由于最小电阻和低马赫数的变化,混合方案具有小的增益,具有在高度H≈11km处的飞行数M = 1.6 ... 4.25的范围。 最小的平衡飞行区域以“鸭子”方案实现。
该表显示了针对典型飞行路径的已开发布局的计算飞行技术数据。
对于所有MSBLA变体具有相同水平的飞行距离显示了成功制造具有稍微增加的煤油燃料的相对储备的吊具的可能性,其中超音速飞行范围为1500-2000 km以返回到本机场。 同时,由于空气动力学方案和冲压式喷气发动机的屏幕进气装置的深度集成而开发的混合布局在飞行速度限制和实现速度限制的高度范围方面具有明显的优势。 马赫数和飞行高度的绝对值,在Hmax Mmax = 4.3 20 m时达到Mmax = 500,表明俄罗斯现有可重复使用的航空航天系统具有高超音速高空吊具的可行性,该吊具提供重量并因此降低成本6中的空间一次性阶段 - 8时间相比从地面开始。
这种空气动力学布局是考虑具有高超音速飞行速度的可重复使用的多模无人机的最终选择。
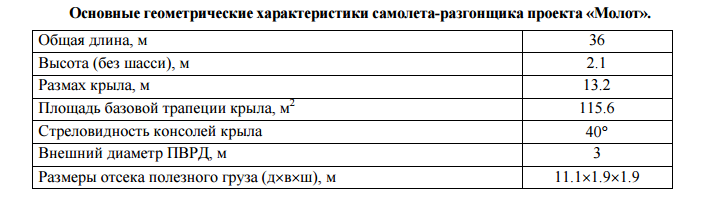
概念和整体布局
与超小型飞机相比,超频飞机的一个独特要求是要从现有飞机场起飞/降落,并且需要以小于冲压喷气机马赫数的马赫数M <1.8 ... 2飞行。这决定了飞机组合动力装置的类型和组成-冲压喷气发动机和加力涡轮喷气发动机(TRDF)。
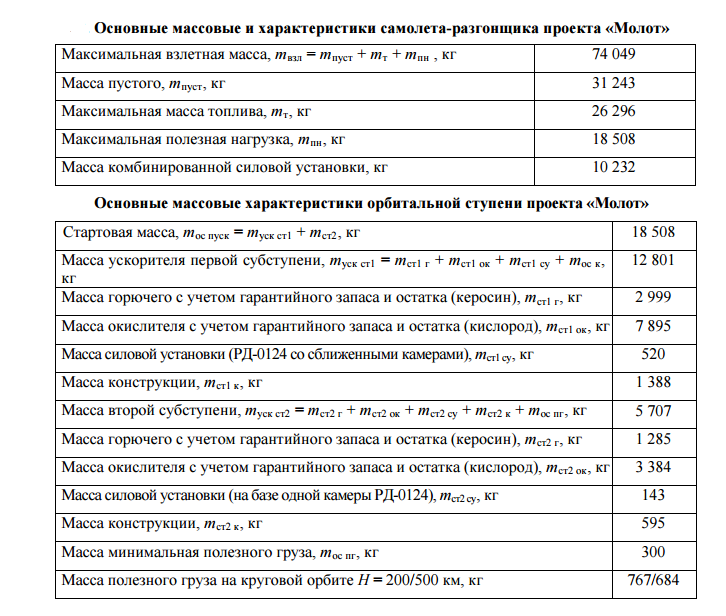
在此基础上,形成了用于轻型运输空间系统的吊具飞机的技术布局和总体布局,其设计有效载荷为1000 kg至低近地轨道200 km。 基于RD-0124氧 - 煤油发动机,使用具有积分损失的特征速度法,基于加速器的起始条件,估算两级轨道级的重量参数。

在第一阶段,安装了RD-0124发动机(30 000空心推力,千克,特定脉冲359с),但框架直径减小,相机间距很小,或RD-0124М发动机(与单基相机和较大直径的新喷嘴不同)。 在第二阶段,发动机使用RD-0124的单个摄像头(采用空心推力7 500 kg)。 基于获得的总重量为18 508 kg的轨道级的重量总结,开发了其配置,并在其基础上为具有联合动力装置(CSU)的74 000 kg的起飞重量的高超音速加速飞机的布局。
LCP包括:
•冲压式喷气发动机,具有类似的ESD原型,燃烧室的类型和布局;
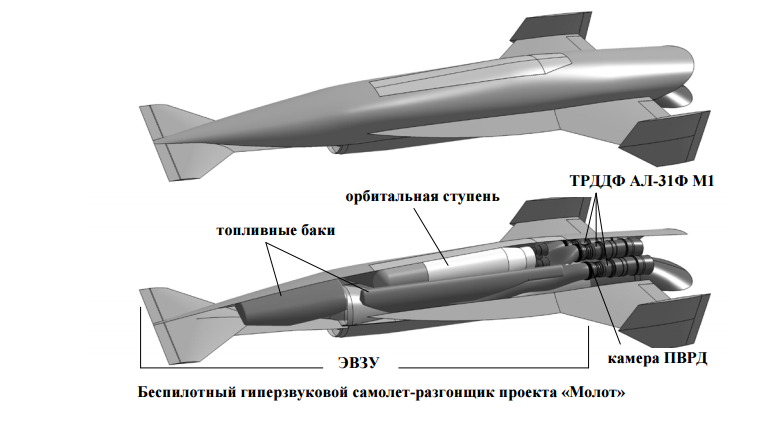
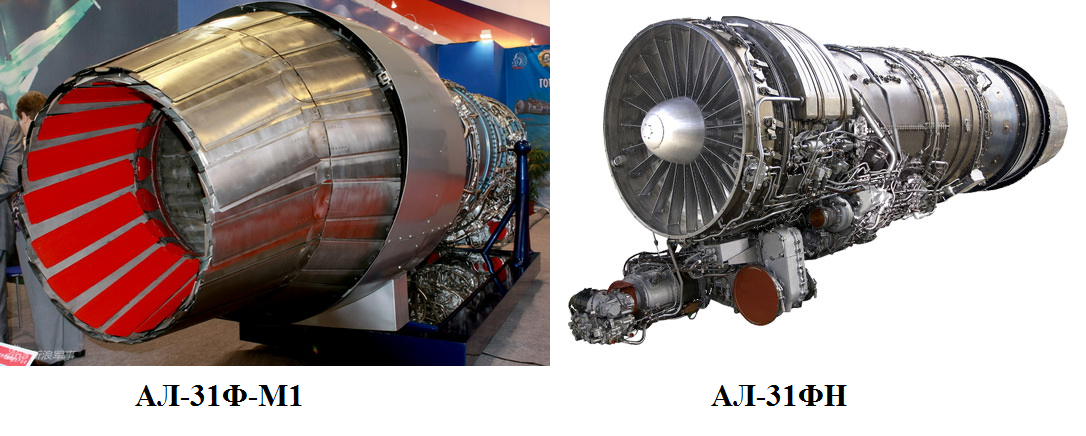
•三台涡轮喷气发动机双回路加力发动机AL-31FМ1
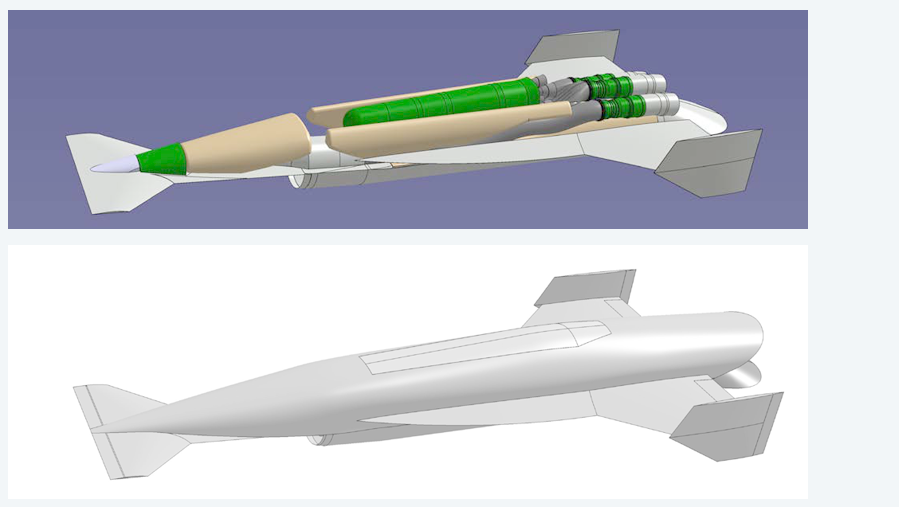
TRDF和冲压式喷气发动机采用垂直包装,允许您分别安装和维护每个。 为了使冲压式喷气发动机具有最大尺寸的ESD以及相应的推力,使用了车辆的整个长度。 机器的最大起飞重量74 t。空重 - 31 t。
该部分显示了一个轨道阶段 - 一个重量为18,5吨的两级液体PH,使1000 KL进入低地球轨道200 km。 还可以看到3 TRDDF AL-31FM1。
这种尺寸的冲压式喷气发动机的实验测试应该使用超频涡扇发动机直接在飞行试验中进行。 在开发单一进气系统时,采用了以下基本原则:
•最小功率负载的移动部件最少;
•完全保留原型冲压式喷气发动机内部存储设备的理论几何形状。
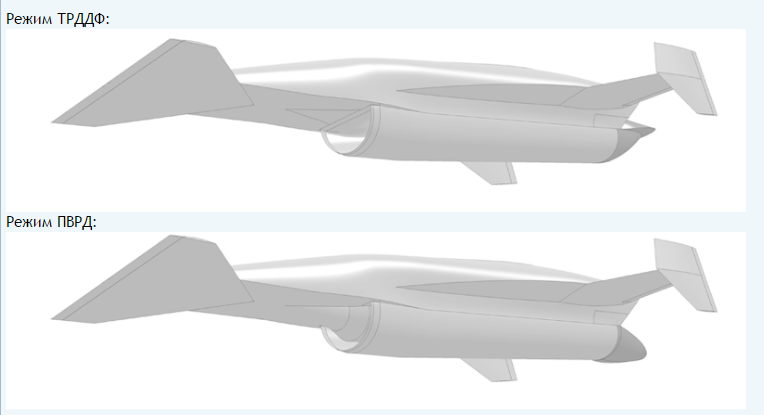
通过在进气口的超音速部分分离用于TRDF和冲压式喷气发动机的管道并开发一种简单易用的变压器装置来实现,该变压器装置将FEM的“来回”超音速部分转换为未调节的配置,同时切换通道之间的空气供应。 起飞时设备的ESD在TRDDF上工作;当速度设置为M = 2,0时,它切换到冲压式喷气发动机。
EVZU变压器装置后面是水平包装,有效载荷舱和主油箱。 补充罐的使用对于“热”机身设计和具有煤油的“冷”隔热罐的隔热是必要的。 有效载荷舱容纳TRDF隔室,当TRDF运行时,该隔室具有用于冷却发动机喷嘴的流动通道,隔室的设计以及冲压式喷嘴的上部盖板。
加速平面的ESWU变压器的操作原理以精确到小的值排除了从入射流侧到装置的运动部分的力反作用力。 与传统的可调节矩形进气口相比,这允许通过减小装置本身的质量及其驱动来最小化进气系统的相对质量。 冲压式喷气发动机具有可裂变的堆叠喷嘴,当在操作中关闭时,确保流体在机身周围的连续流动。 当在过渡到冲压式喷气发动机操作模式时打开堆叠器喷嘴时,上部盖板关闭涡轮风扇发动机舱的底部切片。 冲压式喷嘴在打开时是超音速混合器,并且在大的马赫数下实现了冲压式喷射射流的一定程度的欠膨胀,由于上部翼片上的压力的纵向投射而提供了推力的增加。
与原型相比,由于需要飞机起飞/降落,机翼控制台的相对面积显着增加。 机翼化仅包括升降机。 龙骨配有方向舵,可在着陆时用作制动襟翼。 为了确保亚音速飞行速度下的流动连续性,屏幕具有可偏转的脚趾。 起落架的四柱起落架沿侧面放置,以防止灰尘和异物进入进气口。 这种方案已经在EPOS产品上得到了解决,EPOS产品是轨道平面的类似物,螺旋系统,它允许像自行车底盘一样在起飞时进行下蹲。
为了确定飞行重量,质量中心的位置和吊具飞机的固有惯性矩,开发了CAD环境中的简化固态模型。
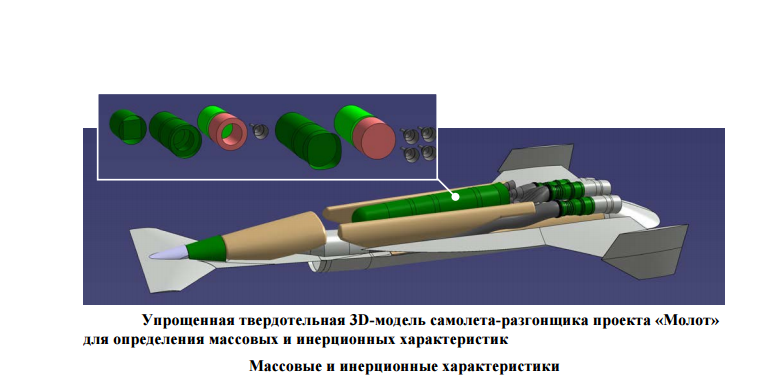
将加速平面的设计,动力装置和设备分成28元素,每个元素通过统计参数(上述皮肤的比重等)估计并由几何相似的固态元素模拟。 对于机身和轴承表面的设计,使用了MiG-25 / MiG-31飞机的加权统计数据。 AL-31F M1发动机的质量是“事后”。 通过燃料箱内腔的截头固态“铸件”模拟不同百分比的煤油倾倒。
还开发了轨道阶段的简化固态模型。结构元素的质量是根据“I”单元(Soyuz-2运载火箭的第三阶段和未来的安加拉运载火箭)的数据进行的,根据质量突出显示固定和可变成分。燃料。
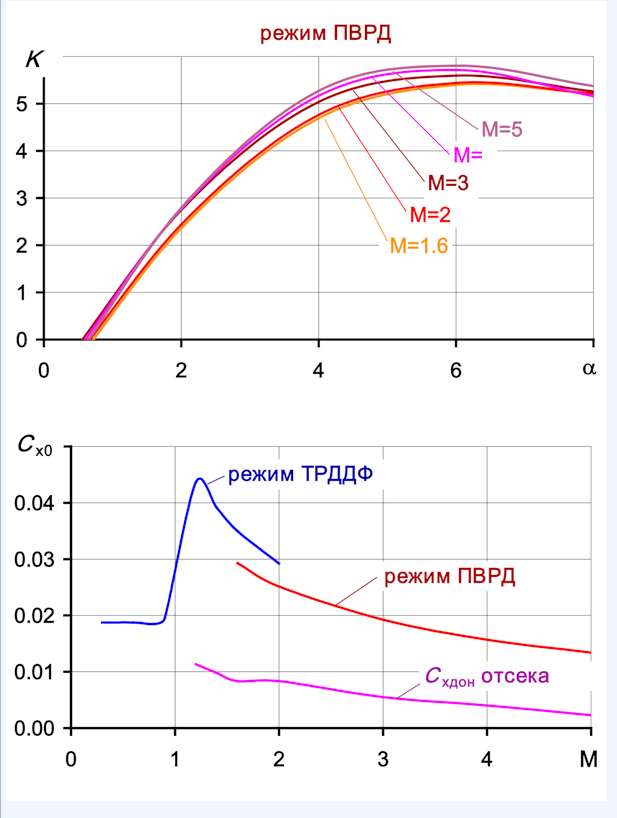
发达飞机空气动力学结果的一些特征:
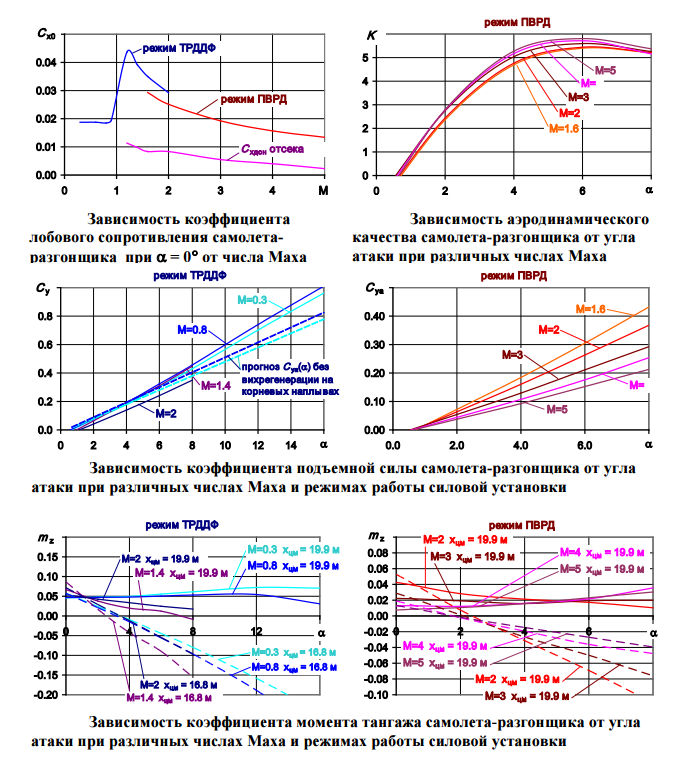
在吊具平面上,为了增加飞行范围,在冲压式喷气发动机下进行配置时使用计划模式,但不向其提供燃料。 在这种模式下,使用喷嘴蒸汽机,当关闭冲压喷射器到管道区域时,它减少了其解决方案,这确保了ESW通道中的流动,使得通道的亚音速扩散器的推力变得等于喷嘴阻力:
Ddif ewm = hss ramjet。 简而言之,在用于测试SHS-2 TsAGI型OVC的装置上使用节流装置的操作原理。 一个子组件 - 喷嘴 - 蒸汽机打开TRDF隔室的底部,开始产生自己的底部阻力,但小于OVC通道中具有超音速流的离流冲压式喷气发动机的阻力。 在EVZU安装SVS-2的测试中,TsAGI显示出进气口稳定运行,马赫数M = 1.3,因此可以认为使用堆垛机喷嘴作为1.3≤M≤Mmax范围内的ESD节流阀的计划模式是可行的。
飞行特性和典型的飞行路径
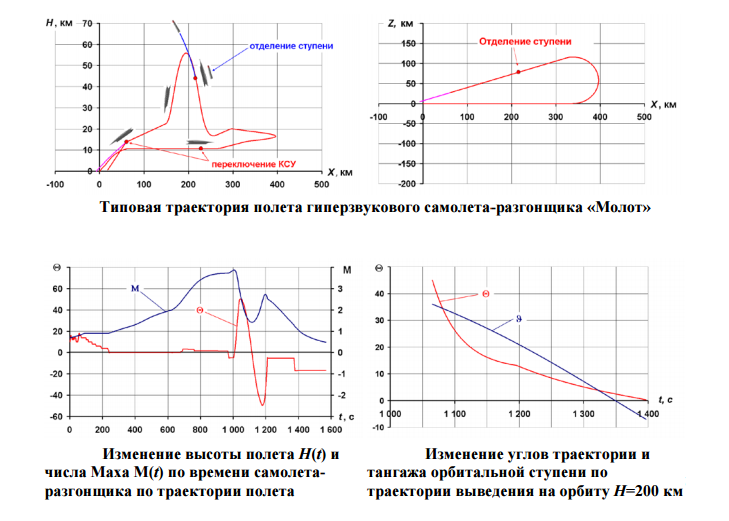
吊具平面的任务是在飞行中,在高度,飞行速度和轨迹角度上发射轨道台阶,满足参考轨道中有效载荷最大质量的条件。 在Hammer项目研究的初步阶段,任务是在使用“山丘”机动在其上升分支上创建大的正轨迹角度值时,以最大高度和飞行速度到达该飞机。 在这种情况下,设定条件以使阶段分离时的速度头最小化,以相应地减小整流罩的质量并减小在打开位置的有效载荷舱上的载荷。
关于发动机运行的初始数据是AL-31F的飞行牵引和经济特性,根据AL-31F M1发动机的工作台数据进行校正,以及与燃烧室和屏幕安装角度成比例的原型冲压发动机的特性。
在图中 示出了在组合发电厂的各种操作模式中高超音速吊具的水平稳定飞行区域。
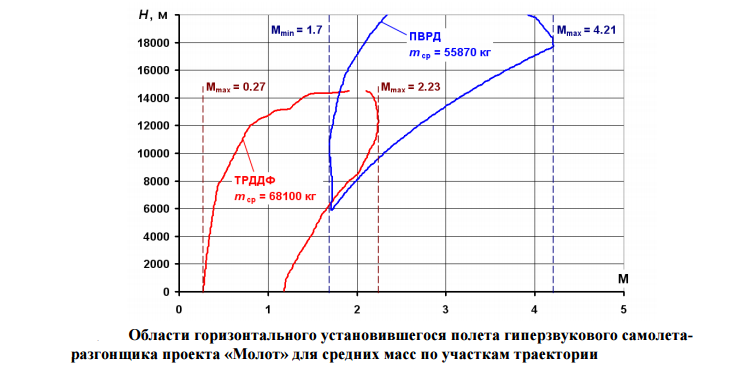
每个区域计算“锤子”项目吊具的相应部分的平均值,用于设备的飞行质量轨迹的部分上的平均质量。 可以看出,射弹达到最大马赫数M = 4.21;当在涡轮喷气发动机上飞行时,马赫数限制为M = 2.23。 重要的是要注意,该图表示需要提供具有宽范围马赫数的冲压式喷气推进系统,其在原型的筛网进气装置的工作期间通过实验实现和确定。 起飞以分离速度V = 360 m / s进行 - 机翼和筛网的承载性能足够,无需使用起飞和着陆机械化以及悬挂的升降机。 在水平截面H = 10 700 m上的最佳爬升之后,射弹的飞机进入超音速马赫亚音速M = 0.9,在M = 2处将组合的动力装置切换并且在M = 2.46处将初步加速度切换到Vopt。 在冲压式抛丸机上攀爬的过程中,吊具平面转向家用机场并达到高度H0peak = 20 000 m,马赫数M = 3.73。
在这个高度,动态机动开始达到最大飞行高度和轨道角度,以启动轨道阶段。 通过加速到M = 3.9和随后的“滑动”机动进行轻柔潜水。 冲压式喷气发动机的末端在高度H≈25000m下工作,随后的爬升是由于吊具的动能。 轨道阶段的发射发生在轨迹的上升分支处,高度H trigger = 44 049 m,马赫数M = 2.05,轨迹角度θ= 45°。 吊具在“山坡”上达到Hmax = 55 871 m的高度。在轨迹的下降分支上,当达到马赫数M = 1.3时,切换冲压式喷气发动机→TRDF以消除冲压式喷气式飞机的进气口。
在TRDF的配置中,吊具计划到达滑行路径,车载燃料供应GGZT = 1000 kg。
在正常模式下,从降落前的冲压式喷气发动机关闭时刻开始的整个飞行不使用在规划范围内具有储备的发动机。
步进运动的角度参数的变化如图所示。
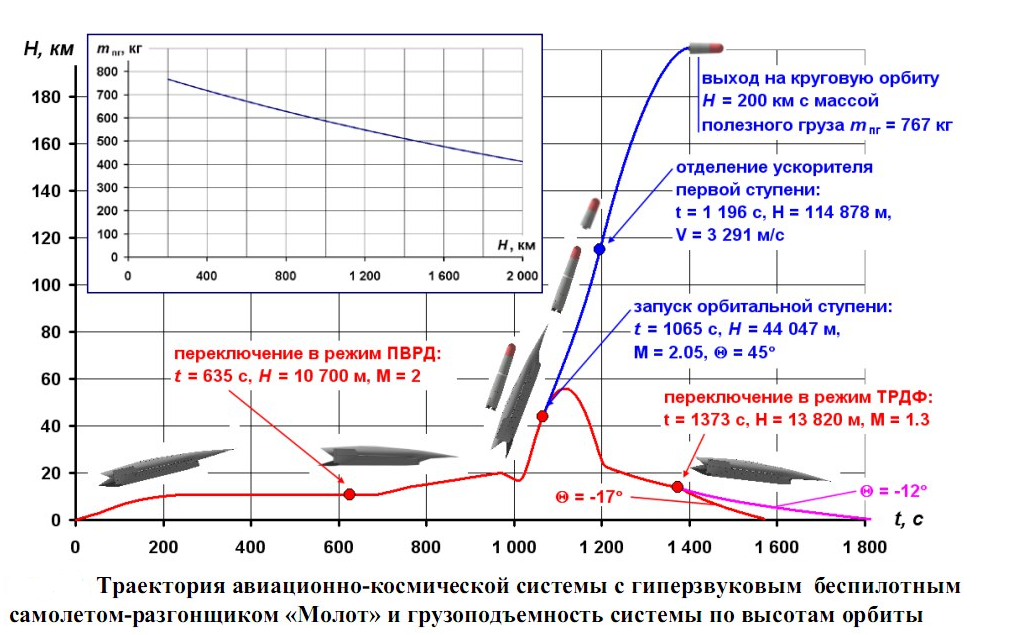
当以V = 200 114 m / s的速度放置在高度H = 878 3 m的H = 291 km的圆形轨道中时,分离第一子级的加速器。 在轨道上的载荷H = 200 km的第二子级的质量是1504 kg,其有效载荷是mpg = 767 kg。
莫洛特项目的高超音速飞机的应用模式和飞行路径与美国“大学”项目RASCAL类似,该项目是在政府机构DARPA的支持下创建的。
Molot和RASCAL项目的一个特殊特征是使用“滑”型的动态机动,并被动进入低速飞行头Нpusk≈50 m的轨道阶段的高发射高度。 发射高度可以减少重力损失和昂贵的一次性轨道载物台的飞行时间,即其总质量。 小型高速发射头可以使有效载荷整流罩的质量最小化,甚至在某些情况下甚至可以拒绝它,这对于超轻型系统(mпгН000<24 kg)至关重要。
与RASCAL相比,Hammer项目助推飞机的主要优势是无需机载液氧供应,这简化并降低了其运营成本,并且排除了尚未开发的技术 飞机 可重复使用的低温罐。 冲压喷气发动机运行模式中的推力重量比使Molot助推器可以到达“工人”的“滑道”的上升分支,以实现轨迹角θlaunch≈45°的轨道阶段,而RASCAL加速器提供其轨道阶段的起始轨迹角只有θlaunch≈20°,随后由于步调失误而造成的损失。
具有Hammer高超音速无人驾驶螺旋桨的航空航天系统在比载荷能力方面优于RASCAL系统:(mphN500 / mvzl)锤= 0.93%,(mpnn486 / mvzl)rascal = 0.25%。
因此,具有亚音速燃烧室的直流喷气发动机(Hammer项目的“关键”)技术由国内航空航天工业开发和掌握,超过了有效的美国MIPCC氧气注入TRDF进气系统技术的高超声波吊具的效率。
称重74 000 kg的高超音速无人驾驶飞行器从机场起飞,加速,沿着优化轨迹爬升,中间转向起飞点到高度H = 20 000 m和M = 3.73,动态滑动式机动,顶篷中间加速潜入M = 3.9。 在轨迹的上升分支处,当H = 44 047 m,M = 2时,分离具有基于RD-18引擎设计的质量508 0124 kg的两级轨道级。
在规划模式中通过“幻灯片”Hmax = 55 871 m后,加速器飞到机场,保证供应1000千克燃料,着陆重量为36 579千克。 轨道阶段进入圆形轨道H = 200 km,有效载荷质量mpg = 767 kg,H = 500 km mbg = 686 kg。
帮助。
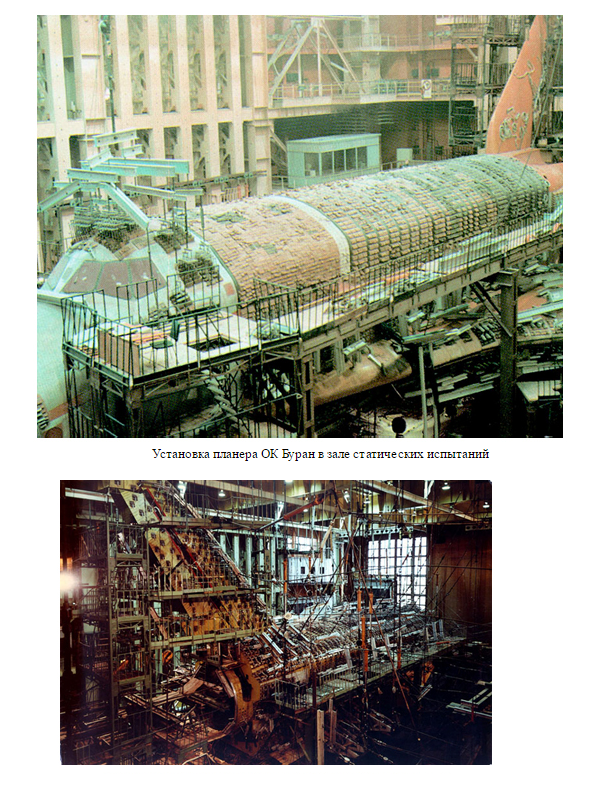
1.NPO Molniya的实验室和测试基地包括以下实验室综合体:
静态强度试验室
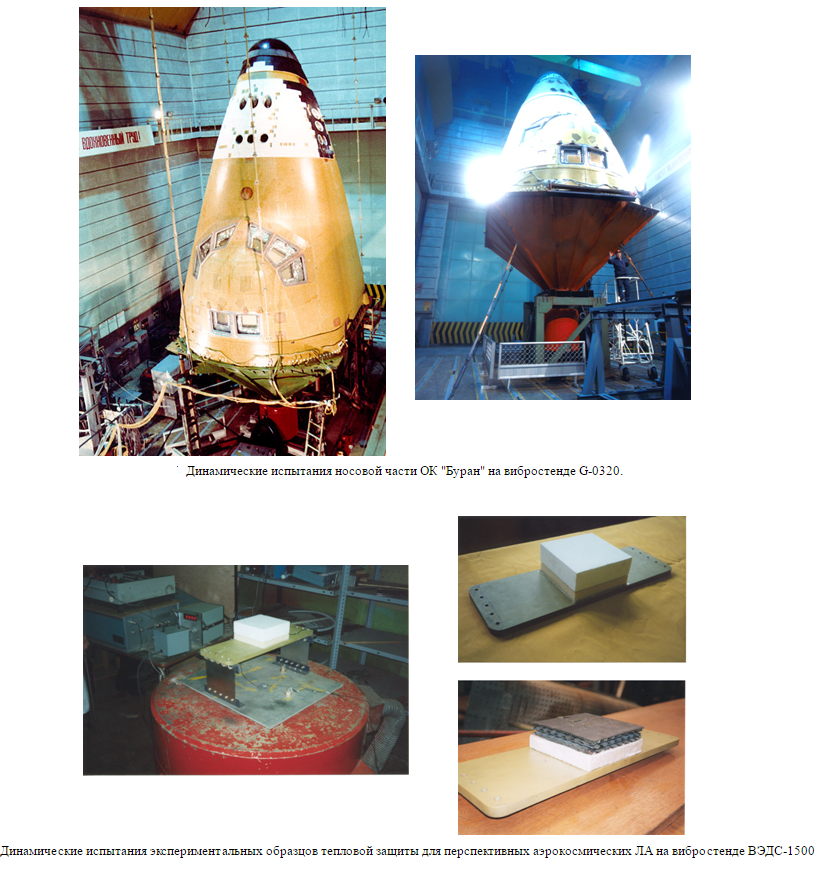
实验室动态测试
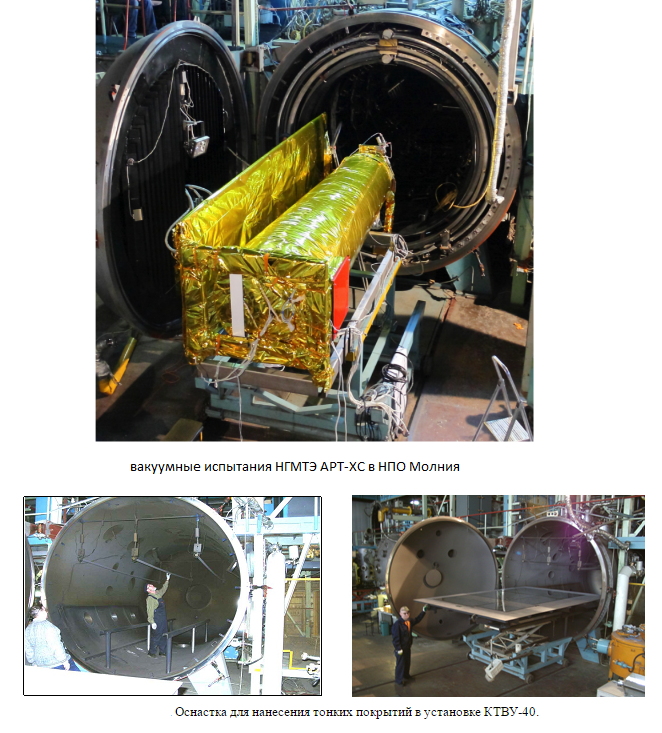
Cryotherm真空测试实验室
气候测试实验室
摩擦学实验室
2.A这是一架高速民用飞机HEXAFLY-INT的项目

这是最大的国际合作项目之一。 它涉及领先的欧洲(ESA,ONERA,DLR,CIRA等),俄罗斯(TsAGI,CIAM,LII,MIPT)和澳大利亚(悉尼大学等)组织。

3. Rostec不允许开发航天飞机“Buran”的公司破产
注意:文章开头的3-D模型与Hammer R&D无关。
基于文章的工作:
高超音速无人驾驶螺旋桨的“锤子”项目,带有组合式屏幕涡轮冲压发动机
/ Makeich G.S.,Tyukaev M.Yu。(莫斯科航空学院(国立研究大学),Volokolamskoye高速公路,4,莫斯科,A-80,GSP-3,125993,俄罗斯),Chibisov Ya.N。(JSC Scientific生产协会“闪电”)/
使用过的材料,照片和视频
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
信息